Tässä projektissa opimme tekemään yksinkertaisen yksipolaarisen askelmoottorin ohjainpiirin 555 ajastinpiirillä. 555-ajastimen lisäksi tarvitsemme myös IC CD 4017: n, joka on vuosikymmenen laskuri-IC.
Kirjoittanut Ankit Negi
Mikä tahansa unipolaarinen moottori voidaan liittää tähän piiriin tietyn tehtävän suorittamiseksi, vaikka sinun on ensin tehtävä joitain pieniä muutoksia.
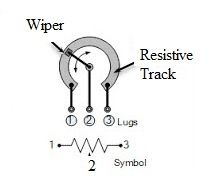
Askelmoottorin nopeutta voidaan säätää potentiometristä, joka on kytketty purkauksen ja kynnyksen väliin tappi 555 ajastinta .
Askelmoottorin perusteet
Askelmoottoreita käytetään alueilla, joilla vaaditaan tietty pyörimismäärä, jota ei voida saavuttaa tavallisilla tasavirtamoottoreilla. Tyypillinen askelmoottorin sovellus on 3D-TULOSTIMESSA. Löydät kahden tyyppisiä suosittuja askelmoottoreita: UNIPOLAR ja BIPOLAR.
Kuten nimestä voi päätellä, yksipolaarinen askelmoottori sisältää käämiä, joissa on yhteinen johdin, jotka voidaan helposti virrata yksitellen.
Bipolaarisella askelmoottorilla ei ole kelojen välillä yhteistä liitintä, minkä vuoksi sitä ei voida käyttää yksinkertaisesti käyttämällä ehdotettua virtapiiriä. Kaksisuuntaisen askelmoottorin käyttämiseen tarvitaan h-sillan piiri.
KOMPONENTIT:
1. 555 AJASTIN-IC

kaksi. CD 4017 IC

3. VASTUKSET 4,7 K, 1 K


4. POTENTIOMETRI 220 K

5. 1 kondensaattori

6. 4 DIODIA 1N4007

7. 4 TRANSISTORIA 2N2222

8. UNIPOLAINEN VAIHE MOOTTORI

9. DC-VIRTALÄHDE
TARKOITUS 555 AJASTIMESTA:
Tässä vaaditaan 555-ajastin tietyn taajuuden kellopulssien generoimiseksi (voidaan muuttaa 220k potilla), joka määrittää askelmoottorin nopeuden.
IC 555 Pinout-tiedot

CD4017: N TARKOITUS:
Kuten edellä jo mainittiin, se on vuosikymmenen laskuri-IC, ts. Se voi laskea jopa 10 kellopulssia. Tämän IC: n tekee erityiseksi se, että sillä on oma sisäänrakennettu dekooderi. Tämän vuoksi sinun ei tarvitse lisätä ylimääräistä IC: tä binäärilukujen purkamiseksi.
4017 laskee jopa 10 kellopulssia 555 tuntia ja antaa suuren lähtötehon, joka vastaa kutakin kellopulssia yksitellen sen 10 ulostulonastasta. Kerrallaan vain yksi tappi on korkea.
TRANSISTORIEN TARKOITUS:
Tässä on kaksi transistorin tarkoitusta:
1. Transistorit toimivat kuin kytkimet täällä, jolloin ne syöttävät yhtä kelaa kerrallaan.
2. Transistorit mahdollistavat suuren virran kulkemisen niiden läpi ja sitten moottorin, sulkemalla siten 555-ajastimen kokonaan pois, koska se voi tuottaa hyvin vähän virtaa.
PIIRIKAAVIO:

Tee liitännät kuvan mukaisesti.
1. Liitä nasta 3 tai 555-ajastimen ulostulotappi IC 4017: n tapaan 14 (kellotappi).
2. Liitä 4017: n aktivointitappi tai 13. nasta maahan.
3. Liitä tapit 3,2,4,7 yksitellen transistoreihin 1,2,3,4.
4. Liitä 10 ja 15 nasta maahan 1k vastuksen kautta.
5. Liitä askelmoottorin yhteinen johto syöttöjännitteeseen.
6. Liitä muut askelmoottorin johdot siten, että kelat saavat virran yksi kerrallaan yhden täydellisen kierroksen täydelliseksi suorittamiseksi. (Voit katsoa valmistajan toimittamasta moottorin datalehdestä)
MIKSI IC 4017: n LÄHTÖNAPPI 10 ON LIITETTY SEN PIN-NRO 15: een (NOLLAA PIN-NRO)?
Kuten jo edellä mainittiin, 4017 laskee kellopulssit yksi kerrallaan aina 10. kellopulssiin asti ja antaa vastaavasti korkean ulostulon ulostulotapeille, kukin lähtötappi menee korkealle.
Tämä aiheuttaa tietyn tarpeettoman viiveen moottorin pyörimisessä. Koska tarvitsemme vain neljä ensimmäistä nastaa moottorin täydelle kierrokselle tai neljä ensimmäistä desimaalilukua o: sta 3: een, tappi nro. 10 on kytketty nastaan 15 niin, että neljännen laskennan jälkeen IC nollautuu ja laskenta alkaa alusta alusta. Tämä varmistaa, ettei moottorin pyöriminen keskeydy.
TOIMINTA:
Kun kytkennät on tehty oikein, jos kytket virran virtapiiriin, moottori alkaa pyöriä vaiheittain. Ajastin 555 tuottaa kellopulsseja vastuksen, potentiometrin ja kondensaattorin arvoista riippuen.
Jos muutat näiden kolmen komponentin arvoa, kellopulssin taajuus muuttuu.
Nämä kellopulssit annetaan IC CD 4017: lle, joka sitten laskee kellopulssit yksitellen ja antaa 1 lähdönä vastaavasti nastalle nro 3,2,4,7 ja toistaa tämän prosessin jatkuvasti.
Koska transistori Q1 on kytketty napaan 3, se kytkeytyy ensin päälle ja sitten transistori Q2, jota seuraavat Q3 ja Q4. Mutta kun yksi transistori on päällä, kaikki muut ovat pois päältä.
Kun Q1 on päällä, se toimii kuin suljettu kytkin ja virta virtaa yhteisen johdon kautta johtimeen 1 ja sitten maahan tranzistorin Q1 kautta.
Tämä virtaa kelan 1 ja moottori pyörii jossain kulmassa, joka riippuu kellotaajuudesta. Sitten sama tapahtuu Q2: lla, joka virtaa kelan 2, jota seuraa kela 3 ja kela 4. Näin saadaan yksi täydellinen kierros.
Kun potentiometriä pyöritetään:
Oletetaan, että potin alkuasento on sellainen, että purkauksen ja kynnystapin välillä on suurin vastus (220k). Lähtökellopulssin taajuuden kaava on:
F = 1,44 / (R1 + 2R2) C1
Kaavasta on selvää, että kellopulssien taajuus pienenee R2: n arvon kasvaessa. Joten kun R2 tai potin arvo on suurin, taajuus on pienin, minkä vuoksi IC 4017 laskee hitaammin ja antaa enemmän viivästettyä lähtöä.
Kun resistanssin R2 arvo pienenee, taajuus kasvaa, mikä aiheuttaa pienimmän viiveen IC 4017: n lähtöjen välillä. Ja siten askelmoottori pyörii nopeammin.
Siten potentiometrin arvo määrittää askelmoottorin nopeuden.
SIMULOINTIVIDEO:
Täältä näet selvästi, kuinka moottorin nopeus vaihtelee vastuksen R2 mukaan. Sen arvoa ensin pienennetään ja sitten kasvatetaan, mikä puolestaan lisää ja vähentää sitten askelmoottorin nopeutta.
Pari: Kuinka kammen taskulamput toimivat Seuraava: Arduino-kierroslukumittarin piiri tarkkoja lukemia varten