DC-moottorin liittäminen mikrokontrolleriin on erittäin tärkeä käsite monissa teollisissa ja robottisovelluksissa. Yhdistämällä tasavirtamoottori mikrokontrolleriin voimme hallita moottorin suuntaa, ohjata moottorin nopeutta. Tässä artikkelissa kuvataan sinua DC-moottorin nopeuden säätö 8051-mikrokontrollerilla Bluetooth-Android-ohjaimen avulla. Lohkokaavio on esitetty alla.

Estä DC-moottorin nopeuden ohjauksen kaavio Android-sovelluksella
DC-moottorin nopeuden hallinta Android-sovelluksella
DC-moottorin nopeuden hallinta Android-mobiililaitteella on monia sovelluksia, kuten teolliset sovellukset, liukuportaat, hissit, robottisovellukset ja turvajärjestelmien sovellukset. Käyttäjän on asennettava Android-älypuhelimeen Android-sovellus.
Käyttäjä voi lähettää ohjeita DC-moottorin nopeuden säätämiseen. Langatonta Bluetooth-yhteyttä käytetään komentojen lähettämiseen käyttäjälle ja ohjaimelle. Piirin päälaitteistokomponentit ovat 8051-mikrokontrolleri, moottoriohjain L293D IC, tasavirtamoottori, Bluetooth-moduuli ja Android-älypuhelin.
Katso lisätietoja tästä linkistä 8051 Mikrokontrollerin historia ja perusteet
Mikrokontrollerin tapin suurin lähtövirta on 15 mA 5 V: n jännitteellä, mutta se ei saa tasavirtamoottoria toimimaan, ja jopa moottorin tuottama taka-EMF (sähkömoottori) voi vahingoittaa mikro-ohjainta.
Siksi ei ole kelvollista liittää tasavirtamoottoria suoraan mikro-ohjaimeen. Joten moottorin ohjainpiiri (L293D IC) on tottunut käyttöliittymä DC-moottori ja mikrokontrolleri .
Moottorin ohjain (L293D)
L293D on kaksois-H-sillan moottoriohjaimen integroitu piiri (IC). Moottoriohjaimet toimivat virranvahvistimina, koska ne ottavat matalan virran ohjaussignaalin ja antavat suurempaa virtaa. Tätä suurempaa virtasignaalia käytetään moottoreiden ohjaamiseen. L293D sisältää kaksi sisäänrakennettua H-sillan ohjainpiiriä . Yhteisessä toimintatavassaan kahta tasavirtamoottoria voidaan käyttää samanaikaisesti sekä eteen- että taaksepäin. Kahden moottorin moottorin toimintaa voidaan ohjata tulologiikalla nastoihin 2 & 7 ja 10 & 15.
Tulologiikka 00 tai 11 pysäyttää vastaavan moottorin. Logic 01 ja 10 kiertävät sitä myötä- ja vastapäivään. Ota nastojen 1 ja 9 (vastaavat kahta moottoria) on oltava korkealla, jotta moottorit voivat alkaa toimia. Kun aktivointitulo on korkea, siihen liittyvä ohjain otetaan käyttöön.
Tämän seurauksena lähdöt aktivoituvat ja toimivat vaiheittain niiden tulojen kanssa. Vastaavasti, kun aktivointitulo on matala, kuljettaja on poistettu käytöstä, ja heidän lähdöt ovat pois päältä ja korkean impedanssin tilassa. Tappikaavio ja L293D IC: n sisäinen rakenne on esitetty alla.

Tappikaavio ja L293D IC: n sisäinen rakenne
Mikä on Android?
Android-käyttöjärjestelmä toimii Linux-pohjaisesti, se on suunniteltu ensisijaisesti kosketusnäyttöisille mobiililaitteille, kuten älypuhelimille ja taulutietokoneille. Yksi nykyisin eniten käytetty mobiili-käyttöjärjestelmä on Android. Android on ohjelmisto, joka perustettiin Palo Altossa Kaliforniassa vuonna 2003.

Android Mobile
Android on tehokas käyttöjärjestelmä ja se tukee useita sovelluksia älypuhelimissa. Nämä sovellukset ovat mukavampia ja edistyneempiä käyttäjille. Android-ohjelmistoja tukeva laitteisto perustuu ARM-arkkitehtuurialusta .
Android on avoimen lähdekoodin käyttöjärjestelmä tarkoittaa, että se on ilmainen ja kuka tahansa voi käyttää sitä. Androidilla on miljoonia saatavilla olevia sovelluksia, jotka voivat auttaa sinua hallitsemaan elämääsi tavalla tai toisella, ja se on saatavilla markkinoilla edullisin hinnoin. Tästä syystä Android on erittäin suosittu.
Kaavio DC-moottorin nopeuden ohjauksen selitys
Kaavio DC-moottorin nopeuden säätöpiiristä ja toiminnan selitys on annettu alla.

Kaaviokuva
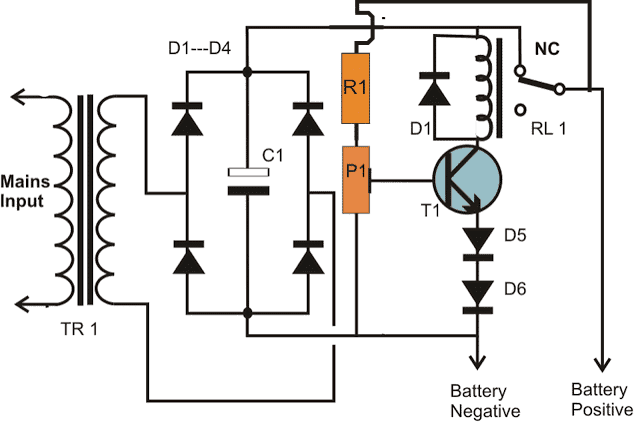
Piiri käyttää tavanomaista virtalähdettä, joka käsittää 230 V: n - 12 V: n porrasmuuntajan ja 4 diodia, jotka muodostavat sillan tasasuuntaajan, joka toimittaa sykkivää tasavirtaa, joka suodatetaan elektrolyyttikondensaattori noin 470 - 1 000 uF.
Suodatettua tasavirtaa ei ole säännelty, joten IC LM7805: tä käytetään 5 V DC-vakion saamiseksi napaansa 3. Säädettyä 5 V DC: tä suodatetaan edelleen pienellä 10 uF: n elektrolyyttikondensaattorilla kaikesta piirin niin synnyttämästä melusta.
Android-laitteen ohjaussignaali lähetetään Bluetoothin kautta. Tämä signaali välitetään mikro-ohjaimen kanssa molempien laitteiden lähettimen ja vastaanottimen avulla. Tämä signaali merkitään yhdellä kirjaimella, joka säätelee moottorin nopeutta ja suuntaa.
Kuinka ohjata tasavirtamoottorin nopeutta? Tässä projektissa tärkein toimintaperiaate on, että PWM-pulssit syntyvät ohjelmoidusta mikrokontrollerista, jotta L293D: n nasta 1 voi lisätä ja vähentää pulssien käyttöjaksoa. Nämä käyttöpulssit voivat johtaa tasavirtamoottorin ajamiseen oikeaan suuntaan tietyllä nopeudella.
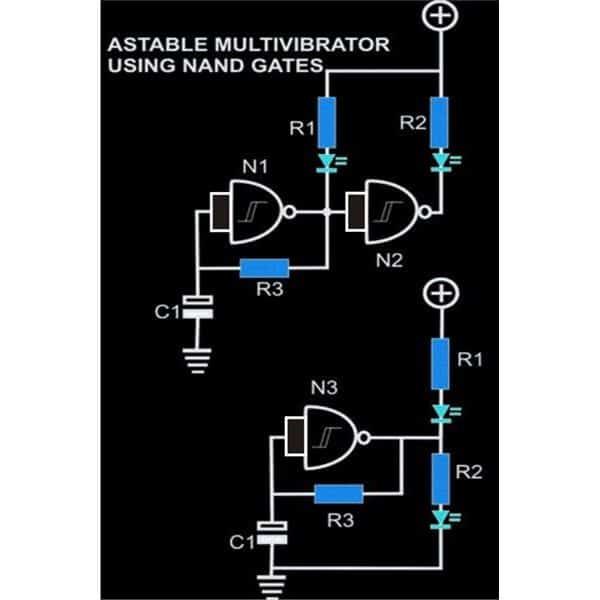
Pulssinleveysmodulaatio
Pulssinleveysmodulaatio saavutetaan mikro-ohjaimen lähdöstä, joka on asianmukaisesti ohjelmoitu ottamaan dataa, joka on vastaanotettu siihen liitetyllä Bluetooth-laitteella. Yksi Bluetooth-moduuli on asianmukaisesti liitetty mikrokontrolleriin kaksisuuntaista tiedonsiirtoa varten, kun ohjelma suoritetaan PWM-pulssien kehittämiseksi.
Android-sovellus mistä tahansa älypuhelimesta kommunikoi puhelimen sisäänrakennetun Bluetoothin kautta Bluetooth-moduuliin, joka on kytketty mikro-ohjaimeen tarvittavia toimintoja varten. Pulssinleveyden modulointitoiminto on esitetty alla.

PWM-käyttöjakso
Android-ohjelmaa käyttävän älypuhelimen ylös-kosketuspainiketta käytetään lisäämään PWM: n ajoaikaa, kun taas alas-kosketuspainiketta käytetään vähentämään käyttöjaksoa.

Android-sovellus DC-moottorin nopeuden säätöön
DC-moottori kulkee L293D-moottoriohjaimen IC: n läpi vaihtelevalla käyttöjaksolla, jotta L293D: n nasta-1 voidaan syöttää mikro-ohjaimelta nopeuden säätämistä varten. Mikrokontrolleriin kytketyt LCD-datanastat näyttävät moottorin käyntinopeuden prosenttiosuuden.
DC-moottorin nopeuden säätö Android-sovelluksella on siten kustannustehokas, käytännöllinen ja turvallisin tapa säästää virtaa. Yksinkertaista PWM (Pulse Width Modulation) -tekniikkaa voidaan käyttää moottorin nopeuden säätämiseen. Aallon toimintajakso ohjaa sen nopeutta. Vaihtamalla lähtöportteja se muuttaa tehokkaasti moottorin suuntaa.
Lisäksi kaikki tähän artikkeliin liittyvät kysymykset antakaa arvokkaita ehdotuksia kommentoimalla alla olevassa kommenttiosassa. Tässä on kysymys sinulle, mitkä ovat DC-moottorin käyttöliittymän sovellukset mikrokontrolleriin?