Robotteja voidaan käyttää monissa sovelluksissa teollisuudessa, sotilas- ja kotitalouksissa. Yksi robottien tärkeimmistä käyttötavoista on voimavara ihmisille. Olipa kyseessä minkä tahansa vaarallinen tilanne, kuten tulipalon puhkeaminen tai paikka, jossa on täynnä maamiinoja, robotit voivat helposti selvittää pääsyn näistä ongelmista. Katsotaan siis näitä kahta tyyppiä robotteja - maamiini tunnistava robotti ja palontorjuntarobotti
Land Mine Sensing -robotti
Kuinka tunnistaa kaivos robottien avulla?
Yksi robotiikan tärkeimmistä sovelluksista on puolustuksessa. Armeijan robotti on kauko-ohjattava ajoneuvo, jolla on monia ainutlaatuisia ominaisuuksia. Se voi olla robottiauto, jolla on kamera vakoilemiseksi, robotti-ajoneuvo, jossa on LASER-ase kohteiden havaitsemiseksi ja tuhoamiseksi, tai robotti, jolla on vakooja metallinilmaisin maamiinojen havaitsemiseksi.
Yksi perinteisistä ja tavanomaisista tavoista miinojen havaitsemiseen on koulutettujen henkilöiden käyttö, jotka etsivät manuaalisesti metalleja tai miinoja metallinilmaisimella. Tämä on kuitenkin vaarallista ja kallista ja myös hidasta.
Tämän ongelman voittamiseksi suositellaan paljon kehittyneempää järjestelmää.
Pari tapaa havaita maamiinat:
- Robotilla, joka voi asettaa koettimen maahan, joka tunnistaa maaperän alapuolella olevat kohteet ja määrittää materiaalityypin.
- Robotin käyttö metallinilmaisimen kanssa, joka tunnistaa johtavien elementtien, kuten maamiinojen, läsnäolon ja hälyttää käyttäjää.
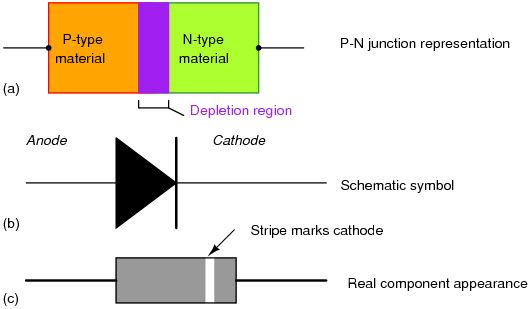
Ennen kuin siirrymme tarkemmin toiseen tyyppiin - ts. Robottiin, jossa on metallinilmaisin -, muistetaan lyhyesti kaksi tärkeää termiä - maamiinat ja metallinilmaisin.
TO Maakaivos on tarkoituksellisesti maan alle sijoitettu räjähdyslaite, joka räjähtää paineen laukaisemana. Tilastollisen raportin mukaan 70 maassa on noin 100 miljoonaa maamiinaa ympäri maailmaa. Kerran sijoitettu maamiini voi toimia jopa 50 vuotta. Eikö se ole vaarallista!

Perusmetallinilmaisin toimii Faradayn induktiolain periaatteella. Se koostuu kelasta, jolla on jännite kehittää sykkivä magneettikenttä sen ympärille. Kun kela tulee johtavan elementin kuten metallin (miinan) läheisyyteen, siinä indusoidaan sähkövirta (pyörrevirta). Indusoitu pyörrevirta aiheuttaa sähkömagneettisen kentän kehittymisen metallin ympärillä, joka välitetään uudelleen kelaan, joka kehittää analysoitavan sähköisen signaalin. Suurempi on kelan ja metallin välinen etäisyys, heikompi on magneettikenttä.
Yksinkertainen prototyyppi:

Yksinkertainen prototyyppi robottiajoneuvoista metallinilmaisimella
Robotin suunnittelu:
Robottiauto koostuu seuraavista yksiköistä:
- Suorakulmainen pohja, joka tukee koko robottirakennetta, kiinnitetty kahdella pyörällä liikkumista varten.
- Pari DC-moottoria tarvittavan liikkeen aikaansaamiseksi robotille.
- Ohjausyksikkö, joka koostuu RF-vastaanottimesta, joka vastaanottaa komentosignaaleja lähetinyksiköltä ohjaamaan moottoriohjainta ja ohjaamaan moottoreita vastaavasti.
- Metallinilmaisimen piiri ja summerihälytys laukaistaan, kun metalli on havaittu.
Kuinka robotti toimii:
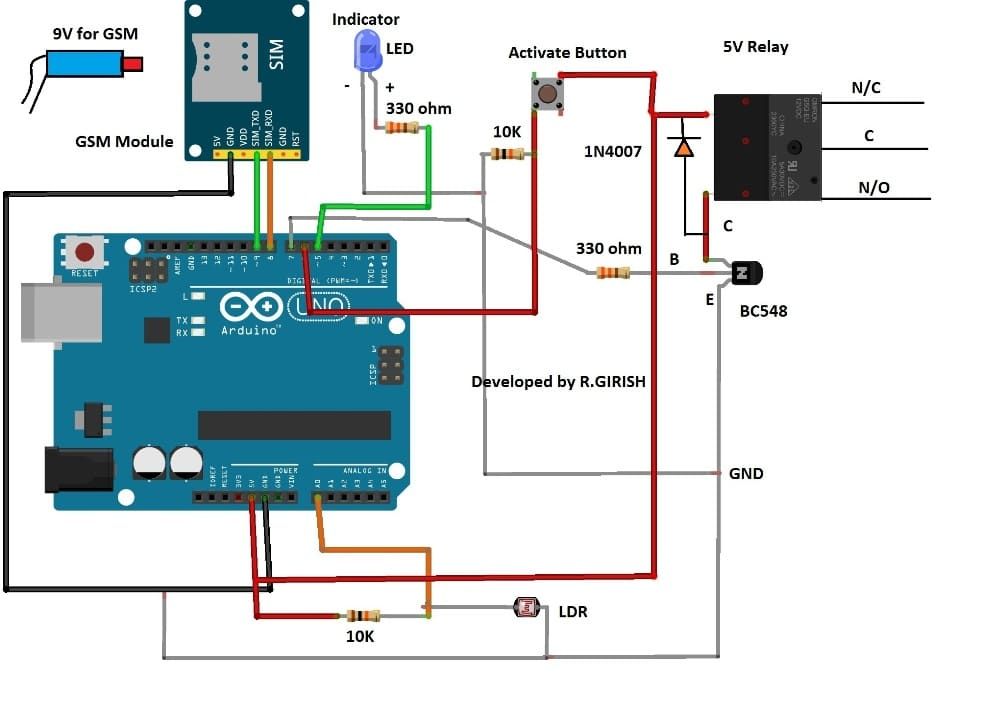
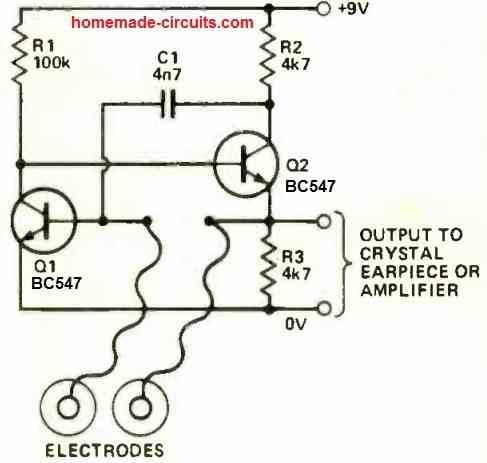
Robotin ohjauspiiriin upotettu metallinilmaisinpiiri koostuu transistorista, jota ohjaa viritetty oskillaattoripiiri, joka koostuu kelasta. Kun havaitaan metalli ja sähkövirta lähetetään uudelleen kelan läpi, transistori1 on kunnossa ja ajaa toisen transistorin2 pois päältä -tilaan. Tämä transistori3 puolestaan ajaa toisen transistorin pois päältä -tilaan. Tämä erityinen transistori 3 on kytketty toiseen transistoriin 4, joka on kytketty siten, että se on tilassa, kun sen ohjaintransistori 3 on pois päältä. Transistori 4 on kytketty siten, että äänimerkille ja LEDille annetaan olosuhteissa oikea esijännitys ja ne alkavat johtaa.

Metalli-ilmaisinyksikön lohkokaavio
LED alkaa palaa ja summeri alkaa soida. Kun metallia havaitaan, summerihälytys alkaa soida ja LED palaa.
Robotin hallinta:
Yksinkertaista prototyyppiä voidaan ohjata RF-viestinnällä, joka on lyhyen kantaman viestintäjärjestelmä. Komennot lähetetään lähettimen avulla ja vastaanotetaan robottipiiriin upotetussa vastaanottimessa robotin liikkeen ohjaamiseksi.

Lähetinosan lohkokaavio
Lähetin koostuu joukosta painikkeita, kuten eteenpäin, taaksepäin, pysäytys, vasen ja oikea, joita painetaan robotin liikkeen aikaansaamiseksi haluamaasi suuntaan. Painikkeet on kytketty mikrokontrollerin tuloporttiin. Mikrokontrolleri vastaanottaessaan nämä signaalit kehittää vastaavan 4-bittisen signaalin rinnakkain toisen I / O-portin yli, johon kooderi IC on kytketty. Kooderi muuntaa nämä signaalit sarjamuodoksi. RF-lähetin moduloi tätä sarjatietoa, joka välitetään antennin kautta.

Lohkokaavio vastaanottajaosasta
Robotille asennettu vastaanotinosa koostuu RF-vastaanottimesta, joka demoduloi tämän signaalin. Dekooderi IC vastaanottaa tämän signaalin sarjamuodossa ja kehittää vastaavan 4-bittisen rinnakkaisdatan lähdössään. Mikrokontrolleri vastaanottaa nämä tiedot ja antaa vastaavasti ohjaussignaalin moottoriohjaimelle IC LM293D, joka käyttää molempia moottoreita.
Palontorjunta-auto:
Käsite palontorjunta robotti ajoneuvo taistelee tulessa. Viime vuosina on tapahtunut useita vakavia onnettomuuksia, mukaan lukien tulipalo ja pommi. Olemme tienneet suurista palo-onnettomuuksista, kuten ydinvoimalaitoksista, öljy-, kaasusäiliöistä ja kemiantehtaista. Suuret palo-teollisuusyritykset tuolla paikoilla, kun tulipalo on alkanut, voivat olla erittäin vakavia. Tuhannet kansat ovat kuolleet tässä esiintymisessä. Se on palontorjunta robotti ajoneuvo tekniikkaa. Tämä robotti-ajoneuvo käytti tulen löytämistä ja tulipalojen torjuntaa.

Palontorjunta-auto
Robottiajoneuvon palontorjunnan toimintaperiaate:
Robottiauto ladattu vesisäiliöaluksella. Pumppua ohjataan langattomalla viestinnällä (RF- ja mobiiliviestintä). Lähettimen pää on kytketty painikkeisiin. Tämän painikkeen avulla komennot lähetetään robotin vastaanottimelle ja ohjausmomentille, kuten eteenpäin, taaksepäin, vasemmalle, oikealle. Vastaanottopäässä on kolme moottoria, jotka on kytketty mikrokontrolleriin.

Lähettimen lohkokaavio

Vastaanottimen lohkokaavio
RF-lähetin toimii RF-kaukosäätimenä, kun kantama on 200 metriä. Kotona, toimistoissa ja teollisuudessa paloantureita pidetään tietyissä paikoissa, kun paloanturin lähellä tapahtuu tulipalo. Anturit ovat tunne, että vastaava bitti lähetetään RF-vastaanottimeen. RF-vastaanotin on integroitu mikrokontrolleriin. Kun radiotaajuusvastaanotin vastaanottaa signaaleja mikro-ohjaimen kuljettamisesta, robotti liikkuu kohti paloantureita. Anturien sijainnit tallennetaan mikro-ohjaimeen. Kun robotti saavuttaa halutun sijainnin, robotti pysähtyy ja aktivoi ruiskun tuleen. Ampumisen jälkeen robotti siirtyy alkuasentoon. Mikrokontrolleri ohjaa koko piiriä.
Robottiajoneuvojen palontorjuntatyypit:
Etusivu Palontorjunta-auto :
Kenttäkäyttö on rajoitettu nykyiseen talon Floreen. Tämä robotti käyttää monia taloustavaroita sytyttämään, kun joku nukkuu tai on poissa. Tätä robottia käytetään kodin suojaamiseen ja tätä sovellusta käytettäessä kaikki ovet avataan Floreen, koska tämä ajoneuvo liikkuu paikasta toiseen kotona. Palontorjunta-alueen on oltava turvallinen, ettei se aiheuta uutta onnettomuutta. Tämän robotin lisäominaisuus on toiminta pitkällä etäisyydellä.
Teollinen palontorjunta:
Suurimmalla osalla teollisuudenaloja on edessään palo-onnettomuusongelmia, kuten kaasu, bensiini, ydinvoimalat, kemianteollisuus, valtava määrä vahinkoja ja enemmän ihmisiä on kuollut lähialueiden lähellä. Tällä robotilla on voimaa kuljettaa paloa palavan alueen sisällä rajoittamattoman veden saamiseksi. Tuli aiheuttaa heikentynyttä näkyvyyttä, äärimmäistä lämpöä ja monia muita tilanteita, jotka voivat johtaa loukkaantumisiin.
Metsäpalontorjunta:
Metsäpalot ovat erittäin vaarallisia. Se voi olla lyhyt aika polttaa suuri määrä metsää. Jopa kaupungin palolaitosten on käsiteltävä metsäpaloja kaupunkia ympäröivällä alueella. Muutama vuosi sitten noin 152 palomiehiä tapettiin 1990-luvulla. Metsäpalorobotiikka käyttää tulta ja taistelee tulessa. Tämä robotti käyttää ulkoista ohjauslaitetta langattomaan viestintään. Moduuli on kytketty lähtöpäähän, jota käytetään robotin metsäpalojen sammuttamiseen. Sovelluksia, kuten paineanturi, lämpötila-anturi, savu-anturi, infrapuna-anturi, käytetään metsäpalorobotin ohjaamiseen.
Kehotuksella!
Vaikka olen antanut robotin perusidean metallinilmaisimella, on edelleen olemassa tärkeä kysymys - Kuinka ohjata robotti epätasaisilla maastoilla, jotka ovat tuntemattomia, etenkin ympäristöissä, joissa on rankkasateita, pölyä ja kuumia lämpötiloja. Voit löytää vastauksen ja lähettää kommenttisi.