Sähkötuuletin on yksi kaikkien aikojen tärkeimmistä sähkölaitteista, koska sillä on etuja, kuten kustannustehokkuus, pieni virrankulutus jne. Sähkötuuletin on perusrakenne useita kehittyneitä tekniikoita . Nämä ovat tärkeitä laitteita tietokoneissa, suuret LED-valot, avaruusasema, laserit, bensiini- ja sähköautot lukemattomia muita asioita. Puhallinta käytetään LVI-järjestelmissä, jotka antavat ihmisten rakentaa valtavia tai maanalaisia rakenteita. Olisi vaikeaa visualisoida maailmaa ilman sähköpuhallinta!
Mikä on tuulettimen nopeuden säätöjärjestelmä?
Nykyään ilman raikastamisen ja lämpötilan hallinnan tarve on vallannut monia teollisuusalueita, kuten auto-, prosessilämpö-, teollisuusalueet tai työpaikkarakennukset, joissa ilmaa hallitaan, jotta voidaan säilyttää rennot olosuhteet matkustajilleen. Yksi merkittävimmistä huolenaiheista lämpöalueella on ensisijainen lämpötilan saavuttaminen ja käytön optimointi. Puhaltimen ohjaus voidaan suorittaa manuaalisesti painamalla kytkintä. Muuta käytön lisäksi tuulettimen nopeutta manuaalisesti. Seuraava järjestelmä antaa sinulle yleiskuvan automaattisesta tuulettimen nopeuden säätöjärjestelmä käyttämällä PIC16F877A-mikrokontrolleria.
PIC16F877A-mikrokontrolleri
PIC16F877A-mikrokontrolleri on koko järjestelmän sydän. Nykyisen huonelämpötilan mittaamiseen tarvitaan LM35-lämpötila-anturin tulot, ja sitten mikro-ohjain reagoi tarvittavan tuulettimen nopeuden säätämiseen. LCD-näyttöä käytetään huoneen lämpötilan ja tuulettimen nopeuden näyttämiseen. PIC16F877A-mikrokontrolleria käyttävän tuulettimen nopeuden säätöjärjestelmän lohkokaavio on esitetty alla.

PIC16F877A-mikrokontrolleri
Tätä mikro-ohjainta voitaisiin käyttää puhaltimen nopeuden säätämiseen huoneen lämpötilan mukaan. Nyt mikro-ohjaimet muuttavat elektronista mallia. Vaihtoehtona useiden logiikkaporttien yhdistämiselle yhdessä jonkin toiminnon suorittamiseksi käytämme nyt ohjelmia porttien johtamiseksi sähköisesti.
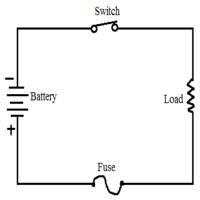
Säännelty virtalähde
Aloitetaan yleensä UPS: stä (säätelemätön virtalähde), joka vaihtelee välillä 9v - 12v DC. 5 V: n virtalähteen valmistamiseksi on käytetty KA8705-jännitesäätimen IC: tä. Tätä IC: tä on helppo käyttää liittämällä positiivinen päätemuoto säätelemätön DC virtalähde i / p-nastaan, kytke miinusliitin yleiseen nastaan ja kytke sitten virta päälle, 5 V: n syöttö o / p-nastasta saadaan mikrokontrollerin käyntiin.

Säännelty virtalähde
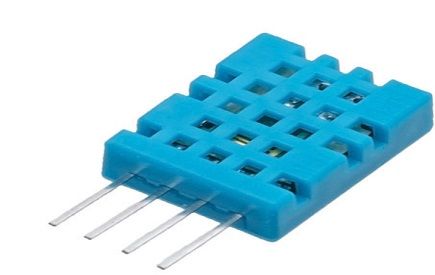
LM35 Lämpötila-anturi
Katso linkki saadaksesi lisätietoja LM35-lämpötila-anturista: Lämpötila-anturit - tyypit, työskentely ja käyttö

LM35 Lämpötila-anturi
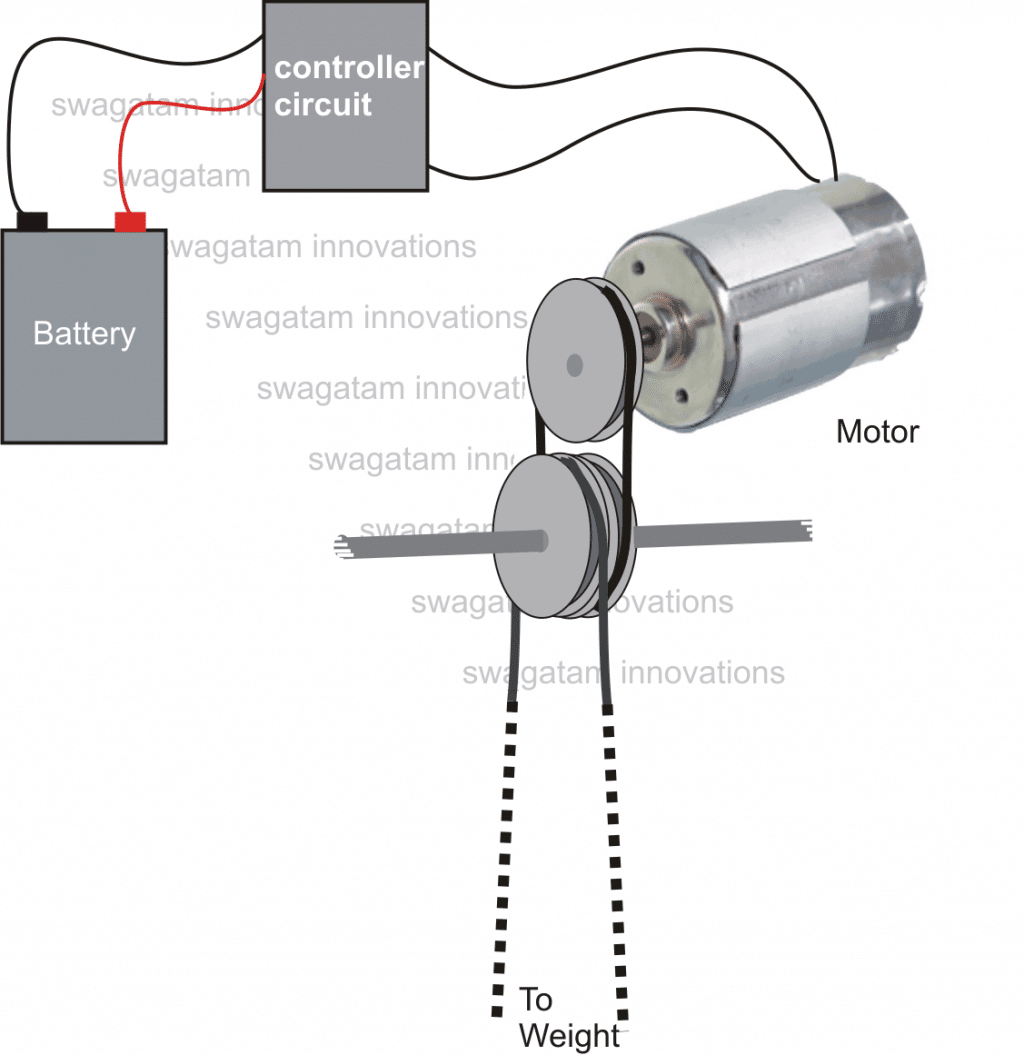
Harjaton DC-moottori
Katso linkki saadaksesi lisätietoja: Harjaton tasavirtamoottori - edut, sovellukset ja hallinta

Harjaton DC-moottori
Nestekidenäyttö (LCD)
Katso lisätietoja linkistä LCD-näytön rakenne ja toimintaperiaate

Nestekidenäyttö (LCD)
Puhaltimen nopeuden säätöjärjestelmä PIC16F877A-piirillä
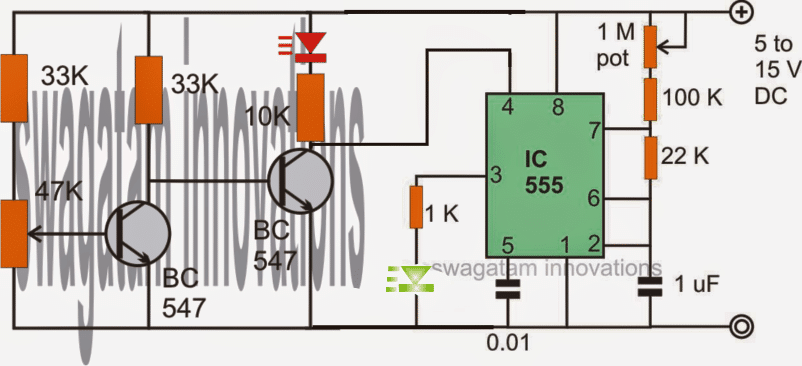
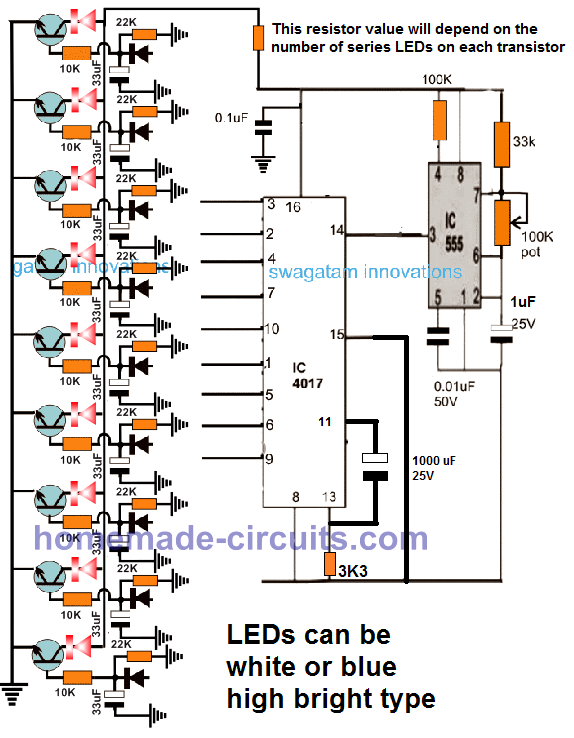
Ehdotettu järjestelmä antaa yleiskuvan siitä, kuinka puhaltimen nopeutta ohjataan PIC16F877A-mikrokontrollerilla huoneenlämpötilan muutoksella. Puhaltimen nopeuden säätöjärjestelmän piirikaavio on esitetty alla. Seuraavassa piirissä PIC16F877A-mikrokontrolleria käytetään puhaltimen nopeuden säätämiseen huonelämpötilan muutoksen mukaan. Nestekidenäyttöä käytetään mittaamaan ja näyttämään lämpötilan muutosten arvo.
Puhaltimen nopeutta voidaan säätää PWM-tekniikalla huoneen lämpötilan mukaan. ADC voi käsitellä analogisia signaaleja mikro-ohjaimessa, joka muuntaa analogiset signaalit digitaalisiksi signaaleiksi. Lämpötila-anturi antaa 10 mv jokaisesta 1 ° C lämpötilan muutoksesta, tämä on analoginen arvo ja se tulisi vaihtaa digitaaliseksi. Lämpötilan muutos lähetetään mikrokontrollerille PORT-A: n nastan 2 kautta. Tässä mikrokontrollerissa on sisäänrakennettu PWM-moduuli, jota käytetään puhaltimen nopeuden säätämiseen muuttamalla käyttöjaksoa.

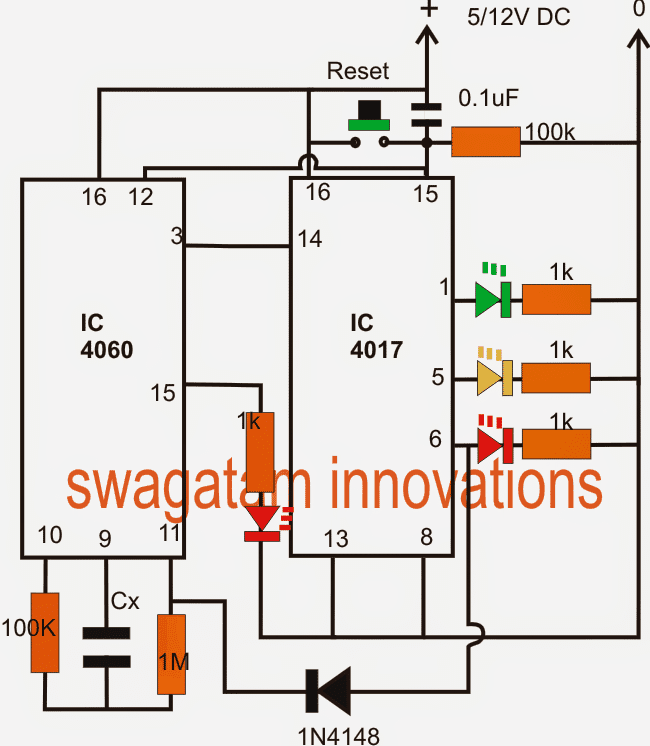
Puhaltimen nopeuden säätöjärjestelmä PIC16F877A-mikrokontrollerilla
Mukaan lämpösensori lukemat, toimintajakso muuttuu automaattisesti puhaltimen nopeuden säätämiseksi. Mikrokontrolleri lähettää PWM-signaalin portissa C olevan nastan RC2 kautta transistoriin, joka toimii tuulettimen ohjauksena. PIC16F877A: n nastojen 13 ja nastojen 14 välillä käytetään kideoskillaattoria. Ne ovat nastoja, jos haluamme antaa ulkokellon mikro-ohjaimelle. 0,1 μF: n ohituskondensaattori, jota käytetään jännitesäätimen +5 V: n ulostulotapissa tasoittamaan mikrokontrollerin ja LCD: n jännitesyöttöä. Lämpötila-anturin ulostulotapa on kytketty pin-RA2: een, joka on ADC0 kaikista ADC: n tuloliittimistä. Nestekidenäytön nasta-3 on kytketty GND: hen 1Kohmin vastuksen kautta paikantamaan nestekidenäytön kontrasti näyttämään lämpötilan LCD-näytöllä.
RB2-RB7: n nastat on kytketty jäljellä oleviin LCD-nastoihin, joita käytetään data- ja ohjaussignaaleihin LCD: n ja mikro-ohjaimen välillä. PWM: n o / p annetaan NPN KSP2222A -transistorin porttipäätteelle mikrokontrollerista. Transistori kytkeytyy päälle ja pois päältä PWM-taajuudella ja pysäyttää moottorin jännitteen. Kun transistori on päällä, moottori alkaa kasvaa ja sammuu, jolloin moottori menettää nopeuden.
Näin ollen kyse on puhaltimen nopeuden säätöjärjestelmän suunnittelusta ja rakentamisesta huonelämpötilan säätämiseen PIC16F877A-mikrokontrollerilla. Lisäksi tuulettimen nopeus kasvaa automaattisesti, jos huonelämpötilaa nostetaan. Yhteenvetona voidaan todeta, että tässä työssä suunniteltu järjestelmä toteutettiin erittäin hyvin kaikilla lämpötilan vaihteluilla ja se voidaan luokitella automaattiseksi ohjaukseksi.