
Nykyään robotiikasta on tulossa yksi kehittyneimmistä tekniikan aloilla. robotiikan sovellukset pääasiassa autojen, lääketieteen, rakentamisen, puolustuksen aloilla ja käytetään myös a palontorjuntarobotti auttaa ihmisiä palo-onnettomuudessa. Mutta robotin hallinta kaukosäätimellä tai kytkimellä on melko monimutkaista. Joten kehitetään uusi projekti, joka on kiihtyvyysanturiin perustuva eleohjausrobotti. Tämän projektin päätavoitteena on ohjata robotin liikettä käden eleellä kiihtyvyysmittarilla.

Kiihtyvyysmittariin perustuva eleohjausrobotti
Kiihtyvyysmittariin perustuva eleohjausrobotti
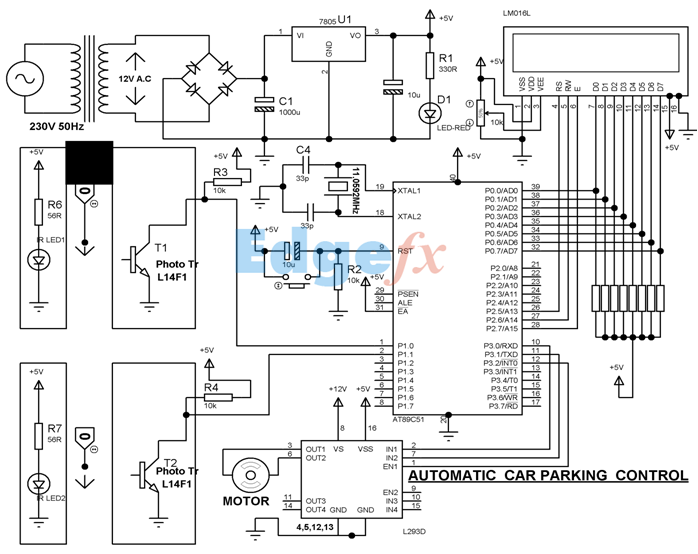
Tämä projekti sisältää lähetinosan ja vastaanotinosan. tarvittavat komponentit Tämän projektin rakentamiseen ovat Ht12e, Ht12d, L293D, AT89S52, 7805, kondensaattori, kide, PBT-liitin, yksinapainen antenni, vastus, LED, kiihtyvyysanturi ja akku. Kiihtyvyysanturi on olennainen laite tässä projektissa.
kiihtyvyysmittari tai lähetinlaite riippuu käden eleestä. Lähetinlaitteen kautta vastaanotetaan komento ja se käsitellään At89S51-mikrokontrollerin avulla. Tämä mikro antaa signaali robotille liikkumaan haluttuun suuntaan. Tämän robotin perustoimintaperiaate datasignaaleista, jotka lähettävät laitteen lukemia robottiin asennettuun mikro-ohjaimeen. Esiohjelmoitu mikro-ohjain toimii ohjelman mukaisesti, mikä saa robotin toimimaan vastaavasti.
Kiihtyvyysanturia käyttävä eleohjattu robotti on eräänlainen robotti, jota voidaan käyttää käden liikkeellä asettamalla kiihtyvyysmittari sen päälle. Tämä projekti on jaettu kahteen osaan lähetinlaite ja vastaanotinlaite. Jos ele toimii lähetinlaitteena ja robotti toimii vastaanottolaitteena.Kun lähetinlaite (kiihtyvyysanturi) asetetaan kädelle, se lähettää signaaleja robotille tarvittavaa toimintaa varten.
Lähetysosassa käytettyjä pääkomponentteja ovat kiihtyvyysanturi, komparaattori, HT12E IC-kooderi ja RF-lähetin .
Kiihtyvyysanturi
Kiihtyvyysanturi on yksi anturin tyyppi ja se antaa analogisen datan liikkuessaan X: n, Y: n ja Z: n suuntaan. Nämä suunnat riippuvat anturin tyypistä. Kiihtyvyysanturin kaavio on esitetty alla. Tämä anturi koostuu nuolen suunnista, jos kallistamme anturia yhteen suuntaan, tietyn nastan tiedot muuttuvat analogisena. Kiihtyvyysanturi koostuu kuudesta nastasta, missä kunkin tapin toiminta käsitellään jäljempänä.

Kiihtyvyysanturi
- Tappi-1: VDD-nastaa käytetään antamaan + 5 V: n syöttö tälle nastalle
- Tappi 2: GND-tappi on kytketty maahan esijännitystä varten
- Pin-3: X-nasta vastaanottaa tietoja X-suunnassa
- Tappi 4: Y-nasta vastaanottaa tiedot Y-suuntaan
- Pin-5: Z-nasta vastaanottaa tietoja Z-suunnassa
- Tappi 6: ST-nastaa käytetään kiihtyvyysanturin herkkyyden säätämiseen 1,5 g tai 2 g tai 3 g tai 4 g
Vertailija
Vertailijaa käytetään muuttamaan analoginen jännite digitaaliseksi jännitteeksi, ja se vertaa sitä analogiseen jännitteeseen vertailujännitteeseen ja antaa tarkan matalan tai korkean jännitteen
Kooderi
Tätä kooderia käytetään 4-bittisen datan koodaamiseen ja lähetykseen RF-lähetinmoduulin avulla.
RF-lähetinmoduuli
RF TX -moduuli toimii 433 MHz: n taajuudella, ja tämä moduuli on helposti saatavilla markkinoilla edullisin hinnoin
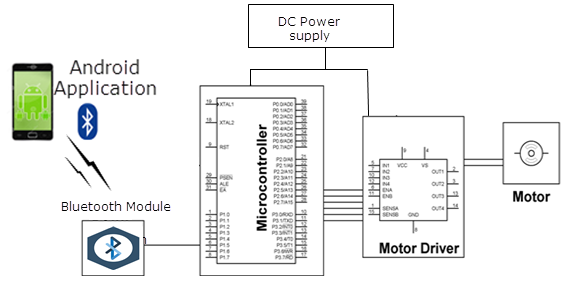
Pääosassa vastaanottavassa osassa käytettyjä komponentteja ovat vastaanotin, dekooderi, mikro-ohjain ja moottoriohjain.

Lähetinosa
RF-vastaanotin
Tämän projektin radiotaajuusvastaanotin vastaanottaa lähettävän laitteen siirtämän datan.
Dekooderi
Dekooderia käytetään vaihtamaan sarjadata rinnakkaiseksi dataksi, joka vastaanotetaan RF-vastaanotinmoduulilta.
Mikrokontrolleri
mikro-ohjain on tärkein osa robotin. Piirissä käytetään 8051-perheen mikrokontrolleria päätöksentekokyvyn antamiseksi
Moottorin kuljettaja
Moottorin kuljettaja on laite, joka antaa liikkeen tehtävän suorittamiseen kuin moottori. Joten vaadimme moottorin kuljettajaa ajamaan ne ohjaimen läpi. Moottorin ja mikro-ohjaimen välinen liitäntä voidaan tehdä käyttämällä tämän piirin L293D-moottoriohjaimen IC: tä.
Vastaanotinosassa RF-vastaanotinmoduuli vastaanottaa tietoja lähettimeltä. Vastaanotettu data voidaan dekoodata IC HT12D: llä. Vastaanotetut tiedot voidaan käsitellä AT89S51-mikrokontrollerilla ja moottorin ohjainta käytetään moottorin ohjaamiseen.

Vastaanotinosa
Eleohjausrobotti toimii
Kiihtyvyysmittariin perustuva eleohjattu robotti liikkuu käden liikkeen mukaan, kun asetamme kiihtyvyysmittarin käteen. Kun kallistamme kättä kiihtyvyysmittarilla robotin edessä, robotti alkaa liikkua eteenpäin, kunnes seuraava liike annetaan. Kun kallistamme kättä taaksepäin, robotti muuttaa suuntaa ja tilaa. Sitten se alkaa liikkua taaksepäin, kunnes seuraava signaali annetaan. Kun kallistamme kättä vasemmalle puolelle, robotti liikkuu vasemmalle puolelle, kunnes seuraava signaali kuuluu. Samalla tavalla, kun kallistamme kättä oikealle puolelle, robotti liikkuu oikealle puolelle.
Sovellukset
kiihtyvyysanturin sovellukset perustuva eleohjattu robotti sisältää
- Näitä robotteja käytetään sotilassovelluksissa robottien käyttämiseen
- Näitä robotteja käytetään lääketieteellisissä sovelluksissa leikkaukseen
- Tätä robotiikkaa käytetään rakennusalalla
- Tätä robotiikkaa käytetään teollisuudessa ohjaamaan trollia ja nostoa.
Näin ollen kyse on kiihtyvyysmittariin perustuvasta eleiden hallintarobotista, sen toiminnasta ja sovelluksista. Toivomme, että olet saanut paremman käsityksen tästä käsitteestä. Lisäksi epäilyksiä tästä käsitteestä tai elektroniikkaprojektit , anna palautteesi kommentoimalla alla olevassa kommenttiosassa. Tässä on kysymys sinulle, mitä ovat kiihtyvyysanturiin perustuvan eleohjausrobotin sovellukset?
Valokuvahyvitykset:
- Kiihtyvyysmittariin perustuva eleohjausrobotti ytimg
- Kiihtyvyysanturi static.flickr








{kind=link}
{kind=link}