Yleensä käytämme perinteisiä seinäpistokkeita kytkemään päälle teollisuuslaitteet tai kodinkoneet, kuten tuuletin, jäähdytin, teollisuusmoottorit ja niin edelleen. Mutta on erittäin vaikeaa käyttää kytkimiä säännöllisesti. Siten, kodin automatisointi ja teollisuusautomaatiojärjestelmät on kehitetty kaikkien tarvittavien sähkö- ja elektroniikkakuormien hallinnan helpottamiseksi. Tämä sähköjärjestelmän automaatio voidaan suunnitella käyttämällä erilaisia antureiden tyypit ja anturipiirit. Joten tässä artikkelissa annetaan kattava yleiskatsaus anturista, erityyppisistä periaatteista sekä piirikaavioista.
Mikä on anturi?
Laite, joka antaa lähdön havaitsemalla muutokset määrissä tai tapahtumissa, voidaan määritellä anturiksi. Yleensä antureita kutsutaan laitteiksi, jotka tuottavat sähköisen signaalin tai optisen lähtösignaalin, joka vastaa tulojen tason vaihtelua. Tunnistimia on erityyppisiä, esimerkiksi termopari, jota voidaan pitää lämpötila-anturina, joka tuottaa lähtöjännitteen tulolämpötilan muutosten perusteella.
Voidaan havaita monenlaisia antureita monilla eri sovelluksissa käytettävillä aloilla. Tarkastellaan muutamia seuraavista antureiden tyypit .

Anturityypit
Erilaisia antureita elektroniikassa
Jokapäiväisessä elämässämme olemme tottuneet käyttämään erityyppisiä antureita usein sähköjärjestelmissämme, kuten sähkö- ja elektroniikkalaitteissa, kuormanhallintajärjestelmissä, koti- tai teollisuusautomaatiossa jne.
Kaikentyyppiset anturit voidaan periaatteessa luokitella analogiset anturit ja digitaaliset anturit . Mutta on olemassa muutamia antureita, kuten lämpötila-antureita, infrapuna-antureita, ultraääniantureita, paineantureita, läheisyysantureita ja kosketusantureita käytetään usein useimmissa elektroniikkasovelluksissa.
- Lämpösensori
- IR-anturi
- Ultraäänianturi
- Kosketa Sensor
- Läheisyysanturit
- Paineanturi
- Pinta-anturit
- Savu- ja kaasuanturit
Lämpösensori
Lämpötila on yksi yleisimmin mitatuista ympäristömääristä eri syistä. Lämpötila-antureita, jotka voivat mitata lämpötilaa, on erityyppisiä, kuten a termoelementti , termistorit, puolijohteiden lämpötila-anturit, vastuslämpötila-ilmaisimet (RTD) ja niin edelleen. Vaatimuksen perusteella lämpötilan mittaamiseen käytetään erityyppisiä antureita eri sovelluksissa.

Lämpösensori
Lämpötila-anturipiiri
Yksinkertaista piirianturia sisältävää lämpötila-anturia voidaan käyttää kuorman kytkemiseen päälle tai pois päältä tietyssä lämpötilassa, jonka lämpötila-anturi havaitsee (tässä käytetään termistoria). Piiri koostuu akusta, termistorista, transistoreista ja releestä, jotka on kytketty kuvan mukaisesti.

Lämpötila-anturipiiri
Rele aktivoidaan lämpötila-anturilla tunnistamalla haluttu lämpötila. Siten rele kytkee siihen liitetyn kuorman (kuorma voi olla AC tai DC). Voimme käyttää tätä virtapiiriä tuulettimen säätämiseen automaattisesti lämpötilan perusteella.
Lämpötila-anturin käytännön soveltaminen
Harkitse ensisijaisesti lämpötila-anturit jotka luokitellaan jälleen erityyppisiin antureihin, kuten termistorit, digitaaliset lämpötila-anturit ja niin edelleen.
Ohjelmoitava digitaalinen lämpötilan säädin on käytännöllinen sulautettuun järjestelmään perustuva elektroninen projekti, joka on suunniteltu ja jota käytetään minkä tahansa laitteen lämpötilan säätämiseen teollisten sovellusten vaatimusten perusteella. Digitaalinen lämpötila-anturipiirisarja on esitetty alla olevassa kuvassa.
Projektipiirilohkokaavio voidaan esittää seuraavasti eri lohkoilla kuvan osoittamalla tavalla.
virtalähde koostuu 230 V: n AC-syötteestä, alas-muuntajasta jännitteen alentamiseksi, tasasuuntaajasta jännitteen tasasuuntaamiseksi vaihtovirrasta tasavirtaan, jännitteen säätimestä vakiolähtöisen DC-jännitteen ylläpitämiseksi projektipiirin tulon antamiseksi.
LCD-näyttö on liitetty 8051-mikrokontrollereihin lämpötilalukemien näyttämiseksi alueella -55 ° C - + 125 ° C. Digitaalista lämpötila-anturia IC DS1621 käytetään 9-bittisten lämpötilalukemien tuottamiseen mikro-ohjaimelle.
EEPROM-muistia käytetään tallentamaan käyttäjän määrittelemät (suurin ja pienin) lämpötila-asetukset 8051-mikrokontrollereiden kytkinryhmän kautta. Mikrokontrolleriin on kytketty rele, jota voidaan käyttää transistoriohjaimen avulla. Kuormaa voidaan käyttää tällä releellä (tässä kuormaa edustetaan lamppuna esittelytarkoituksessa).
IR-anturi
Pieniä valopaketteja, joissa on valokenno ja joita käytetään infrapunavalon lähettämiseen ja havaitsemiseen, kutsutaan IR-antureiksi. IR-antureita käytetään yleensä kauko-ohjaustekniikan suunnitteluun. IR-anturi voidaan käyttää robottiajoneuvon esteiden havaitsemiseen ja siten robottiajoneuvon suunnan hallintaan. Infrapunavalojen havaitsemiseen voidaan käyttää erityyppisiä antureita.

IR-anturi
IR-anturipiiri
Yksinkertaista IR-anturipiiriä käytetään jokapäiväisessä elämässämme television kaukosäätimenä. Se koostuu IR-emitteripiiristä ja IR-vastaanotinpiireistä, jotka voidaan suunnitella kuvan mukaisesti.

IR-anturipiiri
IR-lähetinpiiriä, jota ohjain käyttää kauko-ohjaimena, käytetään infrapunavalon lähettämiseen. Tämä infrapunavalo lähetetään tai lähetetään kohti infrapunavastaanotinpiiriä, joka liitetään laitteeseen kuten TV tai IR-kauko-ohjattava robotti. Vastaanotettujen komentojen perusteella televisiota tai robottia ohjataan.
IR-anturin käytännön soveltaminen
IR-antureita käytetään usein TV-kaukosäätimien suunnitteluun. Se on yksinkertainen infrapuna-anturipohjainen elektroniikkaprojekti, jota käytetään robotti-ajoneuvon ohjaamiseen etäyhteyden kautta television yleiskaukosäätimellä tai IR-kaukosäädin . IR-anturilla ohjattu robottiajoneuvoprojektipiiri on esitetty kuvassa.
IR-ohjattujen robottiajoneuvojen lohkokaavio koostuu erilaisista lohkoista, kuten moottoreista ja moottorisukeltajista, jotka on liitetty 8051-mikrokontrollereihin, virtalähteen akkuun, IR-vastaanotinlohkoon ja TV- tai IR-kaukosäätimeen kuvan osoittamalla tavalla.
Tässä infrapuna-anturipohjaista TV-kaukosäädintä käytetään lähettämään komentoja robotille ajoneuvoon etäyhteyden välityksellä. Perustuu IR-vastaanottimen vastaanottamiin komentoihin vastaanottimen päässä olevaan mikrokontrolleriin. Mikrokontrolleri tuottaa sopivia signaaleja moottoreiden ajamiseksi siten, että ohjataan robottiajoneuvon suuntaa eteen- tai taaksepäin tai vasemmalle tai oikealle.
Ultraäänianturi
Anturia, joka toimii kaikuluotaimen tai tutkan kaltaisella periaatteella ja arvioi kohteen attribuutit tulkitsemalla, kutsutaan ultraääniantureiksi tai lähetin-vastaanottimiksi. On olemassa erityyppisiä antureita, jotka luokitellaan aktiivisiksi ja passiivisiksi ultraääniantureiksi, jotka voidaan erottaa anturien toiminnan perusteella.
Aktiivisten ultraääniantureiden tuottamat korkeataajuiset ääniaallot vastaanotetaan ultraäänianturin avulla kaiun arvioimiseksi. Täten kaistan lähettämiseen ja vastaanottamiseen käytettyä aikaväliä käytetään etäisyyden määrittämiseen kohteeseen. Mutta passiivisia ultraääniantureita käytetään vain erityisissä olosuhteissa esiintyvän ultraäänimelun havaitsemiseen.

Ultraäänianturi piirillä
Yllä olevassa kuvassa esitetty ultraäänimoduuli koostuu ultraäänilähettimestä, vastaanottimesta ja ohjauspiiristä. Käytännön soveltaminen ultraäänianturi piirin kanssa voidaan käyttää ultraäänimatkan anturipiirinä alla olevan kuvan mukaisesti.
Aina kun virtalähde annetaan piirille, ultraääniaallot syntyvät ja välittyvät anturista ja heijastuvat takaisin esteen tai kohteen edestä. Sitten vastaanotin vastaanottaa sen ja lähettämiseen ja vastaanottamiseen käytetty kokonaisaika käytetään kohteen ja anturin välisen etäisyyden laskemiseen. Mikrokontrolleria käytetään koko toimintojen käsittelyyn ja ohjaamiseen ohjelmointitekniikoilla. LCD-näyttö on liitetty piiriin etäisyyden näyttämiseksi (yleensä senttimetreinä).
Ultraäänianturin käytännön soveltaminen
Piirillä varustettuja ultraääniantureita voidaan käyttää kohteen etäisyyden mittaamiseen. Tätä menetelmää käytetään, kun emme voi toteuttaa tavanomaisia menetelmiä mittaamaan esimerkiksi esteettömiä alueita, kuten korkean lämpötilan tai painevyöhykkeet jne. Ultraäänianturipohjainen etäisyyden mittausprojektin piirisarja on esitetty kuvassa.
Etäisyyden mittaus ultraäänianturiprojektin piirilohkokaaviona on esitetty alla olevassa lohkokaaviossa. Se koostuu erilaisista lohkoista, kuten virtalähde, LCD-näyttö, ultraäänimoduuli, esine, jonka etäisyys on mitattava, ja 8051 mikro-ohjainta .
Tässä projektissa käytetty ultraäänianturi koostuu ultraäänilähettimestä ja -vastaanottimesta. Ultraäänilähettimestä lähetetyt aallot heijastuvat takaisin ultraäänivastaanottimeen kohteesta. Näiden aaltojen lähettämiseen ja vastaanottamiseen kuluva aika lasketaan käyttämällä äänen nopeutta.
Kosketa Sensor
Kosketusanturit voidaan määritellä kytkimiksi, jotka aktivoidaan kosketuksella. On olemassa erityyppisiä kosketusantureita, jotka luokitellaan kosketustyypin perusteella, kuten kapasitanssikytkin, vastus kosketuskytkin ja piezo-kosketuskytkin.

Kosketa Sensor
Kosketa anturipiiriä
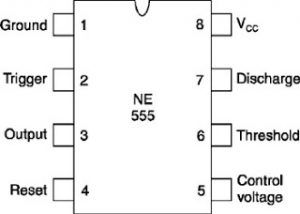
Piiri edustaa yksinkertaista kosketusanturin sovellusta, joka koostuu 555-ajastimesta, joka toimii monostabiilissa tilassa, kosketusanturista tai -levystä, LEDistä, akusta ja elektronisista peruskomponenteista.

Kosketa anturipiiriä
Piiri on kytketty yllä olevan kuvan mukaisesti. Normaalissa tilassa, kun kosketuslevyä ei kosketa, LED pysyy pois päältä. Jos kosketuslevyä kosketetaan kerran, signaali annetaan 555 ajastimelle. Aistimalla kosketuslevyltä vastaanotetun signaalin 555-ajastin aktivoi LED: n ja siten LED palaa osoittaen kosketusanturiin tai -levyyn tehtyä kosketusta.
Kosketusanturin käytännöllinen käyttö
Kosketusherkkä kuorma on suunniteltu kuorman hallintaan. Kosketusohjattu kuormakytkimen projektipiirisarja on esitetty kuvassa.
Kosketusanturiperiaatteeseen perustuva kosketusohjattu kuormakytkin koostuu erilaisista lohkoista, kuten virtalähde, 555 ajastinta , kosketusanturilevy tai kosketuslevy, rele ja kuormitus kosketusohjatun kuormakytkimen lohkokaavion mukaisesti.
Piirissä käytettävät 555 ajastinta on kytketty monostabiilissa tilassa, jota käytetään releen käyttämiseen kuorman kytkemiseksi päälle kiinteäksi ajaksi. 555 ajastimen liipaisin on kytketty kosketuslevyyn, joten 555 ajastinta voidaan laukaista kosketuksella. Aina kun 555 ajastinta laukaistaan kosketuksella (jännite kehittyy ihmiskehon kosketuksella), se tuottaa logiikan korkealle kiinteän ajan. Tätä kiinteää aikaa voidaan muuttaa vaihtamalla RC-aikavakioyhteys ajastimeen. Siten 555-ajastimen lähtö ohjaa kuorman releen läpi ja kuorma sammuu automaattisesti määrätyn ajan kuluttua.
Vastaavasti voimme kehittää yksinkertaisia ja innovatiivisia sähkö- ja elektroniikkaprojektit käyttämällä kehittyneempiä antureita, kuten PIR-anturipohjaista automaattista ovenavausjärjestelmää. Paineanturipohjainen sähköntuotanto, joka voidaan toteuttaa asettamalla pietsosähköiset levyt (nämä ovat yhden tyyppisiä paineantureita) moottoreiden nopeussuojakytkimen alle sähkön tuottamiseksi moottoriteiden katuvaloja varten. Lähestymisanturiin perustuva läheisyysilmaisimen piiri.
Siirrytään nyt eteenpäin ja tiedetään kullekin toimialueelle perustuvat anturityypit, kuten esineiden internetissä, robotiikassa, rakentamisessa ja monilla toimialoilla.
Anturit IoT: ssä
IoT on foorumi, jossa viime aikoina se on kaikkien teknologiaan liittyvien asioiden keskipiste. IoT: n tehtävänä on toimittaa monen tyyppistä tietoa ja älykkyyttä toteuttamalla erilaisia antureita. Nämä anturit toimivat tietojen keräämisessä, toiminnassa ja jakamisessa useiden kytkettyjen laitteiden kesken. Kaikilla kerätyillä tiedoilla anturit mahdollistavat automaattisen toiminnan ja tekniikan älykkyyden. Alla on antureiden tyypit IoT: ssä verkkotunnus.
Läheisyysanturit
Tämän tyyppinen IoT-anturi, jossa se tunnistaa ympäröivän objektin olemassaolon tai olemattomuuden tai löytää objektin ominaisuudet. Sitten se muuntaa havaitun signaalin käyttäjän selvästi ymmärtämään muotoon tai voi olla yksinkertainen elektroninen laite, joka ei ole kosketuksessa heidän kanssaan.

Lähestymisanturin piiri
Lähestymisantureita käytetään pääasiassa vähittäiskaupassa, jossa ne voivat selvittää tuotteen ja kuluttajan välisen liikkeen ja assosiaation. Tämän avulla käyttäjät voivat saada nopeita ilmoituksia alennusten päivityksistä ja mielenkiintoisten tuotteiden erikoistarjouksista. Ja toinen verkkotunnus on autoissa.
Esimerkiksi, kun peruutat autoa, saat ääniä, jos jokin este löytyy, ja tässä lähestymisanturin toiminta toteutetaan.
Lähestymisantureita on monia muita, ja ne ovat:
- Kapasitiiviset anturit
- Induktiiviset anturit
- Valosähköiset anturit
Kemiallinen anturi
Nämä anturit ovat käytössä eri toimialoilla. Näiden antureiden päätavoitteena on merkitä minkäänlaisia muutoksia nesteessä tai havaita mahdolliset ilmakemialliset vaihtelut. Nämä toteutetaan ratkaisevasti suuremmissa kaupungeissa, koska on tärkeää etsiä muutoksia ja tarjota turvallisuutta väestölle.
Kemiallisten antureiden välttämätön toteutus voidaan nähdä kaupallisessa ilmakehän havainnoinnissa ja prosessinhallinnassa, joka voi olla joko tarkoituksellisesti tai tahallaan kehittynyttä kemikaalia, vaarallinen tai radioaktiivinen altistuminen, uudelleenkäytettävät toimet avaruusasemilla, lääketeollisuudessa ja monissa muissa.
Yleisimmin käytetyt kemialliset anturit ovat
- Sähkökemiallinen kaasutyyppi
- Kemiallinen FET
- Chemi-vastus
- Dispergoitumaton IR
- pH-lasielektrodityyppi
- Sinkkioksidi nanorod
- Fluoresoiva kloridityyppi
Kaasuanturi
Ne ovat melkein samoja kuin kemialliset anturit, mutta ne toteutetaan yksinomaan ilmanlaadun muutosten havaitsemiseksi ja erityyppisten kaasujen olemassaolon selvittämiseksi. Samoin kuin kemialliset anturit, niitä käytetään monilla aloilla, kuten maataloudessa, terveydenhuollossa, valmistuksessa ja niitä käytetään ilmanlaadun tarkkailuun, myrkyllisen tai syttyvän kaasun tunnistamiseen, vaarallisen kaasun valvontaan hiiliteollisuudessa, öljy- ja kaasuteollisuudessa, kemian laboratorion tutkimuksessa, tekniikassa - maalit , muovit, kumi, lääke- ja petrokemian tuotteet ja muut.
Muutama eniten toteutetuista kaasuantureista on
- Vety tyyppi
- Otsoniseurantatyyppi
- Kosteusmittari
- Hiilidioksidianturi
- Sähkökemiallinen kaasumainen tyyppi
- Katalyyttinen helmityyppi
- Ilman pilaantumistyyppi
- Hiilimonoksidin ilmaisutyyppi
- Kaasunilmaisintyyppi
Tässä on kyse kaasu- ja kemialliset anturit ja niiden tyypit.
Kosteusanturit
Kosteus on termi, joka määritetään ilmakehän ilmassa tai muissa kaasumaisissa aineissa olevan höyryn määränä. Kosteusanturit yleensä noudattavat lämpötila-antureiden käyttöä, koska suurin osa valmistustoiminnoista tarvitsee tarkat käyttöolosuhteet. Kosteuden mittauksella voidaan varmistaa, että koko toimenpide sujuu helposti ja jos tapahtuu äkillisiä muutoksia, ne menevät välittömästi, koska nämä anturit tunnistavat vaihtelun nopeammin.
Monet aloista, kuten asuin-, kaupalliset, käyttävät näitä kosteusantureita lämmitykseen, tuuletukseen ja jäähdytykseen. Jopa nämä anturit voidaan havaita monilla muilla aloilla, kuten maalaus, sairaalat, lääke-, meteorologia-, auto-, kasvihuone- ja pinnoiteteollisuus.
Näitä käytetään pääasiassa antureiden tyypit IoT: ssä verkkotunnus.
Anturit robotiikassa
Anturilla on enemmän merkitystä robotiikkateollisuudessa, koska ne antavat robotille mahdollisuuden saada tietoa ympäröivästä ympäristöstä ja helpottavat siten sen suorittamista tarvittavissa toiminnoissa. Ilman näiden antureiden käyttöönottoa robotit voivat suorittaa vain muutamia yksitoikkoisia toimintoja, jotka rajoittavat robottien suorituskykyä.
Kaikilla näillä kyvyillä robotit voivat suorittaa monia korkean tason toimintoja. Keskustelkaamme tarkemmin erilaisista tyyppisiä anturit robotiikassa .
Kiihtyvyysanturi
Tämän tyyppistä anturia käytetään kulma- ja kiihtyvyysarvojen laskemiseen. Kiihtyvyysanturia käytetään pääasiassa kiihtyvyyden laskemiseen. On olemassa kahden tyyppisiä voimia, jotka osoittavat vaikutuksen kiihtyvyysanturiin, ja nämä ovat:
Staattinen voima - Tämä on kahden objektin välinen kitkavoima. Painovoiman laskennan avulla voidaan tietää robotin kallistumisarvo. Tämä laskenta on hyödyllinen robottitasapainossa tai tietää, onko robotilla ajoliike ylämäkeen tai tasaisella reunalla.
Dynaaminen voima - Tämä mitataan kiihtyvyyden määränä, joka tarvitaan kohteen liikkumiseen. Dynaamisen voiman laskeminen kiihtyvyysmittarin avulla määrittää joko nopeuden tai nopeuden robotille, jolla on liike.
Näitä kiihtyvyysantureita on saatavana useina kokoonpanoina. Valinnan tyyppi riippuu alan vaatimuksista. Muutama parametreista, jotka on tarkistettava ennen asianmukaista anturin valintaa, ovat kaistanleveys, digitaalisen tai analogisen lähdön tyyppi, akselien kokonaismäärä ja herkkyys.
Alla olevassa kuvassa on kaaviokuva kiihtyvyysanturista.

Äänianturi
Nämä anturit ovat yleensä mikrofonilaitteita, joita käytetään äänen tuntemiseen ja vastaavan jännitetason ilmaisemiseen havaitun melutason perusteella. Äänianturin käyttöönoton avulla voidaan valmistaa pieni robotti navigoimaan vastaanotetun äänen tasosta riippuen.
Valoantureihin verrattuna ääniantureiden suunnitteluprosessi on jonkin verran monimutkainen. Tämä johtuu siitä, että äänianturit tuottavat erittäin pienen jännite-eron, ja tätä on vahvistettava mitattavan jännitteen vaihtelun aikaansaamiseksi. Äänianturin kytkentäpiiri on esitetty alla:

Valoanturi
Valoanturit ovat eräänlaisia antureita, joita käytetään valon tunnistamiseen ja jotka tuottavat jännitteen muutoksen, joka on sama kuin valon voimakkuus, joka tulee valoanturit .
Robotiikkateollisuudessa on pääasiassa kahden tyyppisiä antureita, ja ne ovat fotoresisti ja aurinkosähkö. Jopa on olemassa muun tyyppisiä valoantureita, joita ei ole paljon toteutettu, kuten fototransistori ja valoputket.
Valokuvavastus
Tämä on eräänlainen vastus, jota käytetään pääasiassa valon havaitsemiseen. Tässä vastusarvo muuttuu vastaavasti valon voimakkuustasoa. Fotoresistorille putoavalla valolla on käänteinen suhde fotoresistorin vastusarvoon. Useimmissa tapauksissa fotoresistoria kutsutaan jopa LDR: ksi, joka on valosta riippuva vastus. Valoresistorin kytkentäkaavio on esitetty alla:
Aurinkosähkökennot
Aurinkosähkökennot ovat energianmuunnoslaitteita, joita käytetään muuntamaan aurinkosäteily sähköenergiamuodoksi. Näitä käytetään pääasiassa aurinkorobottien valmistusprosessissa. Erikseen aurinkokennot otetaan huomioon energialähdelaitteina, joka on sovellus, joka on yhdistetty sekä kondensaattoreihin että transistoreihin, ja ne voivat muuttaa tämän anturilaitteeksi.
Kosketusanturit
Tämä on anturityyppi, joka ilmoittaa koskettimen, joka on anturin ja kohteen välillä. Taktiilianturit toteutetaan todennäköisesti jokapäiväisissä tilanteissa, kuten lampuissa, jotka himmentävät tai parantavat kirkkautta koskettamalla niiden alustaa ja nostopainikkeita. Lisäksi on monia kattavia antureita, joissa ihmiset eivät ole täysin tietoisia. Tyypilliset kosketusanturit ovat
Kosketa Sensor
Tämä on anturi, jolla on kyky havaita ja tunnistaa kohteen ja anturin kosketus. Muutamia laitteita, joissa kosketusantureita käytetään, ovat rajoituskytkimet, mikrokytkimet ja muut. Kun jokin liittimistä joutuu kosketuksiin minkä tahansa kiinteän osan kanssa, tämä laite on kätevämpi ja se pysäyttää robotin liikkeen. Lisäksi sitä käytetään tarkastukseen, jos siinä on koetin komponenttikoon mittaamiseen.
Voima-anturi
Tätä käytetään mittaamaan useiden toimintojen, kuten koneen purku ja lastaus, materiaalinkuljetus ja muut, joita robotti käyttää, voima-arvot. Tätä anturia käytetään myös laajalti kokoonpanomenetelmässä ongelmien analysoimiseksi. Tässä anturissa on useita lähestymistapoja, kuten niveltunnistus, kosketusryhmän havaitseminen.
Näiden lisäksi on monia antureita monilla teollisuudenaloilla. Anna meille nopea yleiskatsaus näistä:
Rakennuksessa käytettävien antureiden tyypit
Rakennusteollisuudessa käytetään pääasiassa antureita:
- Lämpötila-anturit
- Liiketunnistimet
- Sähköiset jännite- ja virta-anturit
- Savun ja palonilmaisimet
- Kamera-anturit
- Kaasuanturit
Anturityypit etätunnistuksessa
Kaukotunnistimia on pääasiassa kahden tyyppisiä, ja ne ovat aktiivisia ja passiivisia antureita.
Aktiiviset anturit
Nämä tuottavat energiaa asioiden ja paikkojen skannaamiseksi ja sitten anturi tunnistaa ja laskee kohdeobjektin joko takaisinhajotun tai heijastuneen säteilyn määrän. Esimerkkejä aktiivisista antureista ovat RADAR ja LIDAR, joissa päästöprosessin ja paluuprosessin välinen aikaero lasketaan määrittämällä pinta-ala, nopeus ja kohteen suunta.
Passiiviset anturit
Nämä anturit keräävät säteilyä, jota ympäröivät paikat tai esine joko säteilevät tai heijastavat. Tärkein esimerkki passiivisesta anturista on heijastunut auringonvalo. Ja muita esimerkkejä ovat radiometrit, lataukseen kytketyt esineet, infrapuna- ja filmikamerat.
Anturien luokittelu etäseurannassa ovat

Anturityypit etätunnistuksessa
Suunnitteluun erityyppiset anturipohjaiset piirit voit ladata ilmaisen e-kirjamme suunnitellaksesi elektroniikkaprojekteja itse. Voit myös pyytää meiltä teknistä apua lähettämällä ideoitasi alla olevaan kommenttiosioon. Tässä on kysymys sinulle, mitkä ovat muun tyyppiset anturit ja pääasiassa virtausantureiden piirisuunnittelu ?




![Ioninilmaisinpiiri [staattisen purkautumisen ilmaisin]](https://electronics.jf-parede.pt/img/sensors-and-detectors/09/ion-detector-circuit-static-discharge-detector-1.jpg)