Viestissä käsitellään yksivaiheista vaihtelevan taajuuden käyttöpiiriä tai VFD-piiriä vaihtovirtamoottorin nopeuden ohjaamiseksi vaikuttamatta niiden käyttöominaisuuksiin.
Mikä on VFD
Moottorit ja muut samanlaiset induktiiviset kuormat eivät nimenomaan 'tykkää' toimimasta taajuuksilla, jotka eivät välttämättä ole niiden valmistusteknisten ominaisuuksien mukaisia, ja yleensä ne muuttuvat paljon tehottomiksi, jos ne pakotetaan tällaisiin epänormaaleihin olosuhteisiin.
Esimerkiksi moottoria, joka on määritetty toimimaan 60 Hz: n taajuudella, ei ehkä suositella toimimaan 50 Hz: n taajuuksilla tai muilla alueilla.
Se voi tuottaa ei-toivottuja tuloksia, kuten moottorin kuumeneminen, vaadittavat nopeudet pienemmät tai suuremmat ja epänormaalin korkea kulutus, mikä tekee asioista erittäin tehotonta ja pienentää liitetyn laitteen käyttöikää.
Kuitenkin moottoreiden käyttämisestä erilaisissa tulotaajuusolosuhteissa tulee usein pakko ja tällaisissa tilanteissa VFD: stä tai vaihtuvan taajuuden käyttöpiiristä voi tulla erittäin kätevä.
VFD on laite, jonka avulla käyttäjä voi säätää vaihtovirtamoottorin nopeutta säätämällä tulojännitteen taajuutta ja jännitettä moottorin spesifikaatioiden mukaisesti.
Tämä tarkoittaa myös sitä, että VFD: n avulla voimme käyttää mitä tahansa vaihtovirtamoottoria minkä tahansa käytettävissä olevan verkkovirran kautta riippumatta sen jännitteestä ja taajuudesta, mukauttamalla VFD: n taajuus ja jännite sopivasti moottorin spesifikaatioiden mukaisesti.
Tämä tehdään normaalisti käyttämällä annettua ohjainta vaihtelevan nupin muodossa, joka on skaalattu eri taajuuskalibroinnilla.
VFD: n tekeminen kotona voi kuulostaa vaikealta ehdotukselta, mutta alla esitetty ehdotus osoittaa, että loppujen lopuksi ei ole niin vaikeaa rakentaa tätä erittäin hyödyllistä laitetta (jonka olen suunnitellut).
Piirin käyttö
Piiri voidaan jakaa periaatteessa kahteen vaiheeseen: puoliruskea kuljettajan vaihe ja PWM-logiikkageneraattorin vaihe.
Puolisillan kuljettajavaiheessa käytetään puolisillan kuljettajaa IC IR2110, joka hoitaa yksin suurjännitemoottorin käyttöasteen, joka sisältää kaksi vastaavaa korkea- ja matalaa sivujohtoa.
Kuljettaja-IC muodostaa siten piirin sydämen, mutta vaatii vain muutaman komponentin tämän ratkaisevan toiminnon toteuttamiseksi.
Yllä oleva IC tarvitsee kuitenkin korkean logiikan ja matalan logiikan taajuuksilla kytketyn kuorman ajamiseksi halutulla spesifisellä taajuudella.
Näistä hi- ja lo-logiikkasignaaleista tulee kuljettaja-IC: n toimintadata, ja niiden on sisällettävä signaalit määritetyn taajuuden määrittämiseksi sekä PWM: t vaiheittain verkkovirran AC kanssa.
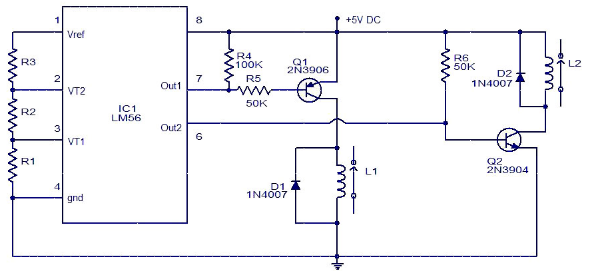
Yllä olevat tiedot luovat toinen vaihe, joka käsittää pari 555 IC: tä ja vuosikymmenen laskurin. IC 4017.
Kaksi 555 IC: tä ovat vastuussa modifioitujen siniaalto-PWM: ien generoimisesta, jotka vastaavat täyden aallon AC-näytettä, joka on johdettu asteittaisesta sillan tasasuuntaajan ulostulosta.
IC4017 toimii toteeminapalähdön logiikkageneraattorina, jonka vaihteleva taajuusnopeus tulee piirin MAIN-taajuuden määritysparametriksi.
Tämä määrittävä taajuus kynsitään IC1: n tapista # 3, joka myös syöttää IC2: n laukaisevan tapin ulos ja modifioitujen PWM: ien luomiseksi IC2: n tapissa # 3.
Muokatut siniaalto-PWM: t skannataan 4017 IC: n lähdöissä ennen IR2110: n syöttämistä, jotta muokattujen PWM: ien tarkka 'tulos' päällekkäin puolisillan ohjaimen ulostuloon ja viime kädessä käytettävään moottoriin.
Cx ja 180k potin arvot tulisi valita tai säätää asianmukaisesti, jotta moottorille saadaan oikea määritetty taajuus.
Korkeapuolisen mosfetin tyhjennyksen korkea jännite on myös laskettava asianmukaisesti ja johdettava oikaisemalla käytettävissä oleva verkkojännite AC sen jälkeen, kun se on sopivasti nostettu tai laskettu alas moottorin teknisten tietojen mukaisesti.
Yllä olevat asetukset määrittävät oikeat voltit hertsiä kohti (V / Hz) tietylle moottorille.
Molempien vaiheiden syöttöjännite voidaan muodostaa yhteiseksi linjaksi, sama maadoitusliitännälle.
TR1 on porrastettu 0-12 V / 100 mA: n muuntaja, joka tarjoaa piireille vaaditut käyttöjännitteet.
PWM-ohjaimen piiri

Yllä olevan kaavion IC 4017: n lähdöt on integroitava asianmukaisesti seuraavan kaavion HIN- ja LIN-tuloihin. Liitä myös yllä olevassa kaaviossa ilmoitetut 1N4148-diodit alempien MOSFET-porttien kanssa alla olevan kaavion mukaisesti.
Full Bridge -moottorin kuljettaja

Päivittää:

Edellä käsiteltyä yksinkertaista yksittäistä VFD-rakennetta voidaan edelleen yksinkertaistaa ja parantaa käyttämällä itsek oskilloivaa täyssillaa IC IRS2453, kuten alla on esitetty:
Täällä IC 4017 eliminoidaan kokonaan, koska täyden sillan ohjain on varustettu omalla oskillaattorivaiheellaan, joten tälle IC: lle ei tarvita ulkoista laukaisua.
Täydellisen sillan suunnitteluna moottorin lähtöohjauksella on täydellinen nollan ja maksiminopeuden säätöalue.
IC 2: n tapissa # 5 olevaa pottia voidaan käyttää moottorin nopeuden ja vääntömomentin säätämiseen PWM-menetelmällä.
V / Hz-nopeuden säätöä varten IRS2453: een liittyvää Rt / Ct: tä ja IC1: ään liittyvää R1: tä voidaan vastaavasti säätää (manuaalisesti) sopivien tulosten saamiseksi.
Yksinkertaistaminen vieläkin

Jos koko siltaosuus on mielestäsi ylivoimainen, voit korvata sen P, N-MOSFET-pohjaisella täyssillapiirillä alla olevan kuvan mukaisesti. Tämä muuttuvan taajuuden ohjain käyttää samaa konseptia lukuun ottamatta täyssillan ohjainosaa, joka käyttää P-kanavan MOSFET-elementtejä yläpuolella ja N-kanavaisia MOSFET-laitteita matalalla puolella.
Vaikka kokoonpano saattaa näyttää tehottomalta P-kanavan MOSFETien osallistumisen vuoksi (niiden korkean RDSon-luokituksen vuoksi), monien rinnakkaisten P-MOSFET-laitteiden käyttö saattaa näyttää tehokkaalta lähestymistavalta matalan RDSon-ongelman ratkaisemiseksi.
Tässä käytetään 3 MOSFET-laitetta rinnakkain P-kanavalaitteille, jotta varmistetaan laitteiden minimoitu lämmitys N-kanavan vastaavien kanssa.
Edellinen: Kuinka suojata MOSFET-tiedostoja - perusteet selitetty Seuraava: I / V-seurantapiiri aurinko-MPPT-sovelluksiin