Tämän aikakauden teollisuuden automaatio , robotteja käytetään erilaisten prosessien käsittelyyn tuotannon tarkan ja paremman laadun saavuttamiseksi. Ihanteellisen moottorin valinta täydelliselle robotille on aina vaikea tehtävä, kun suunnittelet robotin erityisesti teollisuudelle. Oikea valinta sähkömoottorit teollisuusroboteissa vaatii useita parametreja varren hallinnan, asennon, kulma- ja lineaariliikkeiden huomioon ottamiseksi.

Teollisessa robotiikassa käytetyt moottorit
Moottorin valinta on robottien harrastajille vähiten ymmärretty käsite, joka vaatii strategisointia ja vakavaa analyysia. Se käsittää robotin nopeuden, kiihtyvyyden, vääntömomentin vaatimusten määrittämisen robotin painon, pyörän koon ja sovelluksen perusteella, missä se on tarkoitus toteuttaa. on saatavana nykypäivän markkinoilla, mutta enimmäkseen Tiny pager -moottorit, servomoottorit , lineaarimoottorit, askelmoottorit ja DC-moottoreita käytetään teollisuusroboteissa käyttöalueensa mukaan.
Moottorin väärä valinta johtaa vammaiseen robottiin, joten minkä tyyppinen moottori on paras ja sopivin tekemään teollisuusroboteista todellisia, tarkkoja ja riittäviä täyttämään kaikki teollisuuden prosessitarpeet pitäen samalla mielessä kaikki realistiset vaatimukset?
Tässä keräsimme joitain näkemyksiä näistä moottoreista teollisuuden ammattilaisilta vastaavan moottorin valitsemiseksi teollisiin sovelluksiin.
Kehotamme sinua seuraamaan asiantuntijoiden mielipiteitä, joiden tavoitteena on tarjota teollisuuden robotiikan parhaat moottorit käytettävissä olevilla tasavirta-, stepperi-, harjattomilla ja servomoottoreilla tarkkoja, kustannustehokkaita ja luotettavia robottien liikkeitä varten.
Ch.Sampath Kumar
M.tech VLSI-suunnittelussa
Teknisen sisällön kirjoittaja
 DC-moottoreita on saatavana laajalla alueella jatkuvaa käyttöä varten, mutta se vaatii vaihdevähennyksiä vastaaviin sovelluksiin. Askelmoottori ei vaadi vaihteiden vähennystä, koska sen porrastettu käyttö tarjoaa alhaisen nopeuden tietyissä sovelluksissa. Viimeinkin servomoottoreita käytetään tarkkaan ja tarkkaan ohjaukseen, joka toteutetaan suljetun piirin toiminnoissa. Mutta se vaatii ylimääräistä palautetta ja ajopiirejä, joten se on kallista kuin tasavirta- ja askelmoottori. Joten servomoottorit tekevät robotista luotettavamman tarkan liikkeensa ansiosta.
DC-moottoreita on saatavana laajalla alueella jatkuvaa käyttöä varten, mutta se vaatii vaihdevähennyksiä vastaaviin sovelluksiin. Askelmoottori ei vaadi vaihteiden vähennystä, koska sen porrastettu käyttö tarjoaa alhaisen nopeuden tietyissä sovelluksissa. Viimeinkin servomoottoreita käytetään tarkkaan ja tarkkaan ohjaukseen, joka toteutetaan suljetun piirin toiminnoissa. Mutta se vaatii ylimääräistä palautetta ja ajopiirejä, joten se on kallista kuin tasavirta- ja askelmoottori. Joten servomoottorit tekevät robotista luotettavamman tarkan liikkeensa ansiosta.
Viswanath Prathap
M.Tech sähköenergiatekniikassa
Teknisen sisällön kirjoittaja

Valitse ja sijoita -robotteja löytyy tyypillisesti teollisuudesta, jotta ne voivat valita kohteen yhdestä paikasta tai paikasta ja sijoittaa sen toiseen paikkaan tai paikkaan. Tätä tarkoitusta varten robottien nivelten kulmaliikkeitä on hallittava, mikä voidaan saavuttaa servomoottoreilla. Näitä servomoottoreita ohjataan käyttämällä robottiohjaimen antamia PWM-tietoja robottien nivelten käyttämiseksi. Servomoottorit kykenevät tuottamaan riittävän vääntömomentin siirtääkseen kohdetta nopeasti pysäytysasennosta. Siksi niitä käytetään pyörinä sotilas- ja teollisuusrobottiajoneuvoissa. Askelmoottoreita voidaan käyttää myös asennon säätämiseen, mutta nämä kuluttavat virtaa myös lepoaikana vain lukitsemiseen ja käsketyn asennon pitämiseen. Joten, servomoottoreita käytetään tyypillisesti teollisessa robotiikassa korkean suorituskyvyn korvikkeena askelmoottoreille.
S. Naresh Reddy
M.tech sulautetussa järjestelmässä
Projektiopas
Mekaanisen robotin rakennetta on ohjattava perfoon  rm-tehtävä. Robotin hallitsemiseksi on kolme erilaista vaihetta, kuten havaitseminen, käsittely ja toiminta. Anturit antavat robotille tiedot nivelten sijainnista ja päätefektorista, sitten nämä tiedot käsitellään ohjausyksikölle ja lasketaan sopiva signaali mekaanisesti liikkuvalle moottorille. Valtaosa robotteista käyttää sähkömoottoreita. Kannettavissa robotteissa käytetään toistuvasti harjattomia ja harjattuja tasavirtamoottoreita ja teollisuusroboteissa vaihtovirtamoottoreita. Nämä moottorit ovat edullisia järjestelmissä, joissa on kevyempi kuormitus, ja joissa vallitseva liike on pyörivä.
rm-tehtävä. Robotin hallitsemiseksi on kolme erilaista vaihetta, kuten havaitseminen, käsittely ja toiminta. Anturit antavat robotille tiedot nivelten sijainnista ja päätefektorista, sitten nämä tiedot käsitellään ohjausyksikölle ja lasketaan sopiva signaali mekaanisesti liikkuvalle moottorille. Valtaosa robotteista käyttää sähkömoottoreita. Kannettavissa robotteissa käytetään toistuvasti harjattomia ja harjattuja tasavirtamoottoreita ja teollisuusroboteissa vaihtovirtamoottoreita. Nämä moottorit ovat edullisia järjestelmissä, joissa on kevyempi kuormitus, ja joissa vallitseva liike on pyörivä.
Suresh megaji
M. tekniikka langattomissa viestintäjärjestelmissä
Teknisen sisällön kirjoittaja

Jos haluat olla mukana robotiikassa ja sen soveltamisessa teollisuuteen, sinun tulisi tietää robotiikassa käytetyistä moottoreista, koska robotiikka riippuu enimmäkseen moottoreista. Periaatteessa robottikoneita käytetään tuotannon eri sovelluksiin. Erilaisia 'moottoreita', kuten tasavirta-, pulssi-, askelmoottori-, optinen käyttö-, osittainen kääntö- ja aulavaikutteisia moottoreita jne. ... käytetään joillakin tekniikoilla niiden soveltamiseksi teollisuudessa ja niiden tekemiseksi ystävällisiksi,
- DC-moottoreita käytetään akkukeskeisiin sovelluksiin, hitaampiin nopeuksiin ja liikkuvuuteen.
- Aina missä tarvitsemme pyörimissuuntaista sovellusta, voimme käyttää Stepper-moottoreita, kuten yksi- ja kaksisuuntaisia moottoreita.
- Pään ja käsivarsien liikkeisiin voimme käyttää osittaisia kääntömoottoreita.
- Jos haluamme käyttää magneettikenttiä, voimme käyttää Hall Effect- ja optisen aseman moottoreita jne.
Käyttämällä älymoottoreita käyttävää robotiikkaa voimme säästää rahaa, aikaa, tilaa, vaarallisia liikkeitä jne.
Ajay Sahare
Markkinointipäällikkö

Teollisuusrobotteja käytetään teollisessa valmistusympäristössä. Nämä ovat varret, jotka on kehitetty erityisesti hitsausta, materiaalinkäsittelyä, maalausta ja muita sovelluksia varten.
Kaikkia teollisuusympäristössä käytettyjä mekatronisia laitteita ei voida pitää robotteina. ISO: n (International Standards Organisation) määrittelemän teollisuusrobotiksi katsotaan automaattisesti ohjattava, uudelleen ohjelmoitava, monikäyttöinen manipulaattori, joka voidaan ohjelmoida kolmelle tai useammalle akselille.
Teollisessa robotiikassa käytetyt moottorit ovat
- Vaihtovirta (AC) moottorit
- Tasavirta (DC) moottorit
- Servomoottorit
- Askelmoottorit.
1. Vaihtovirtamoottorit voidaan edelleen jakaa asynkronisiin ja synkronisiin tyyppeihin. Esimerkiksi induktiovirtamoottori on asynkronityyppinen yksikkö, joka koostuu olennaisesti lankakierroksesta staattorista ja roottorista. Virta on kytketty johtoon ja sen läpi virtaava vaihtovirta indusoi käämityssä johdossa sähkömagneettisen kentän (EM) riittävän voimakkaalla kentällä, joka antaa voiman roottorin liikkeelle. Synkronimoottorit ovat vakionopeusmoottoreita, jotka toimivat synkronisesti vaihtovirtajohdon taajuuden kanssa ja joita käytetään yleisesti tarkan vakionopeuden edellyttämässä paikassa.
2. Monet teolliset sovellukset, robotiikka mukaan lukien, käyttävät tasavirtamoottoreita usein nopeuden ja suunnan hallinnan helppouden vuoksi. Ne kykenevät äärettömälle nopeusalueelle, täydestä nopeudesta nollaan, laajalla kuormitusalueella.
Koska tasavirtamoottoreilla on suuri vääntömomentin suhde hitauteen, ne voivat reagoida nopeasti ohjaussignaalien muutoksiin. DC-moottoria voidaan ohjata sujuvasti nollaan ja kiihdyttää välittömästi vastakkaiseen suuntaan ilman monimutkaista virtakytkentäpiiriä. Kestomagneettiharjattomat tasavirtamoottorit ovat yleensä kalliimpia kuin harjatyypit, vaikka ne voivat tarjota etuja virrankulutuksessa ja luotettavuudessa.
Ilman kommutaattoria harjattomat moottorit voivat toimia tehokkaammin ja suuremmilla nopeuksilla kuin perinteiset tasavirtamoottorit. Useimmat harjattomat tasavirtamoottorit toimivat puolisuunnikkaan vaihtovirta-aaltomuodolla, mutta jotkut moottorit toimivat siniaalloilla. Siniaalto-ohjatut harjattomat moottorit voivat saavuttaa sujuvan toiminnan pienemmillä nopeuksilla pienellä vääntömomentilla, mikä tekee niistä ihanteelliset hiontaan, pinnoittamiseen ja muihin sovelluksiin, kuten pinnan viimeistelyyn.
Harjattujen tasavirtamoottoreiden tapauksessa voit käyttää pulssinleveyden modulointia (PWM), jos haluat moottorin pyörivän hitaammin menettämättä tehoa. Tämä tarkoittaa periaatteessa moottorin kytkemistä päälle ja pois päältä erittäin nopeasti. Tällä tavalla moottori pyörii pienemmällä nopeudella ikään kuin pienempi jännite annettaisiin huolimatta tehosta.
Periaatteessa harjatun tasavirtamoottorin tuottama vääntömomentti on liian pieni ja nopeus liian suuri ollakseen hyödyllinen. Joten vaihdetta vähennetään yleensä nopeuden vähentämiseksi ja vääntömomentin lisäämiseksi.
3. Servomoottoreita käytetään suljetun piirin järjestelmissä, joissa on digitaalinen ohjain. Ohjain lähettää nopeuskomennot ohjaimen vahvistimelle, joka puolestaan syöttää servomoottoria. Jonkinlainen palaute, kuten erottelulaite tai enkooderi, antaa tietoja servomoottorin sijainnista ja nopeudesta. Erotin tai kooderi voidaan integroida moottoriin tai sijoittaa etäältä. Suljetun piirin järjestelmän vuoksi servomoottori voi toimia tietyllä ohjausprofiiliin ohjelmoidulla liikeprofiililla.
4. Askelmoottorit voivat toimia takaisinkytkennällä tai ilman, moottorin pyöriminen hajotettuna pieniksi kulmaportaiksi. Sitä ohjataan pulssitetuilla komentosignaaleilla, ja se voi pysähtyä tarkasti käsketyssä paikassa tarvitsematta jarruja tai kytkinkokoonpanoja. Kun virta katkaistaan, kestomagneettinen askelmoottori pysyy yleensä viimeisessä asennossaan. Useita askelmoottoreita voidaan ylläpitää tahdistettuna ajamalla ne yhteisestä lähteestä.
Dev desai
Markkinointipäällikkö 
Jos aiot osallistua robotiikkaan, sinun on perehdyttävä monen tyyppisiin moottoreihin, kaikki robotiikkaliikkeet motorisoituvat tavalla tai toisella, joten on tärkeää tietää, mitä vaihtoehtojasi on.
DC-moottorit
Paristokäyttöisen DC-moottorin liikesuunta määräytyy virransyötön napaisuuden perusteella. Tämä on ehdottoman välttämätöntä robottitoiminnoille. Onneksi tämän tyyppisiä moottoreita on monenlaisia kokoja, jännitevaatimuksia ja niitä on saatavana kaikkialla.
Erilaiset moottorit ovat alla
- Liikkuvuuden moottori
- Nopea harrastusmoottori
- Hihnakäyttöinen moottori
- Kolikkopelin moottori
- Pulssikäyttöinen
- Varren mukautettu moottori
- Bipolaarinen askelmoottori
Bio-moottori
Bio-metalli on hämmästyttävä aine, jota on käytetty muutaman vuoden ajan, ja sillä on useita sovelluksia robotiikan alalla. Kuvasta voidaan nähdä, että biometallilangan pala kutistuu viidellä prosentilla pituudestaan, kun vain muutama volttia käytetään sen yli. Vuosien testauksen jälkeen biolanka on osoittautunut vahvaksi, luotettavaksi ja yhä hyödyllisemmäksi uusien tuotteiden tullessa esiin. Sen hieman hitaampi vasteaika tekee siitä ihanteellisen robotti käsivarsi- ja käsisovelluksiin, joissa nykiminen olisi ongelmallista. Pitkä lanka voi tuottaa merkittävän liikkeen, kun se venytetään robottivarren koko pituudelta. Kaupallisilla markkinoilla on tällä hetkellä robottivarren sarjoja, joissa käytetään biometallia.
Releet
Robotiikan relettä käytetään melkein aina eristämään moottoreille tarkoitettu teho tietokoneiden virtalähteestä. Alhaisen impedanssinsa vuoksi moottorit asettavat voimakkaita virtalähteitä koskevia vaatimuksia ja aiheuttavat useita häiriöitä, joita tietokoneet eivät siedä. Siksi on hyvä käyttää erillistä suurvirtalähdettä vain moottoreille.
Solenoidit
Solenoidit ovat parhaiten käytettäviä manipulaattorin ohjauslaitteina tai kytkinoperaattoreina. Niiden liike on nopeaa ja voimakasta, joten joustoa käytetään melkein aina tarttujissa toiminnan pehmentämiseen. Kuten kuvasta näet, ohjauskaapeleita käytetään tarttujan sulkemiseen. Nämä ohjausjohdot voivat toimia myös paluujousina. Tämän kaltaisia graspereja löytyy enemmän tuotantolinjatyöstä, jossa tehtävä on hyvin mitattu ja kattaa kapeat parametrit.
Toissijaiset toiminnot
Useimpiin moottoritoimintoihin liittyy liikkuvuus, käsivarsi, pää tai jokin muu näkyvä ulkoinen liike, mutta jotkut moottoriliikkeet eivät ole niin näkyviä. Suuret teollisuusrobotit käyttävät hydraulijärjestelmiä, jotka käyttävät pumppumoottoreita hydraulinesteen käyttöpaineen tuottamiseen. Toinen tärkeä moottoreiden toissijainen tehtävä on ohjattu säätö. Tarkkuuden parantamiseksi moottoreihin liitetyt potentiometrit ovat yleensä monikierroslaitteita.
Johtopäätös
Robotit voivat olla hyvin monimutkaisia laitteita, jotka vaativat monenlaisia moottorikäyttöisiä liikkeitä. Tämän artikkelin on tarkoitus antaa yleiskatsaus laitteista, joita saatat käsitellä robotinrakentajana. Olisi hyvä aloittaa tutkimalla robottilaitteiden toimittajia ja käytettävissä olevia tarvikkeita. Tuotteita on nyt saatavana valtava määrä, ja Internetin avulla on helppo löytää, oppia ja käyttää. Riippumatta tarpeistasi, pienen kekseliäisyyden ja päättäväisyyden, joka kaikilla robotinrakentajilla näyttää olevan, pitäisi palvella sinua.
Samadan Wandre
Markkinointipäällikkö
'Robotiikassa käytettävät moottorit'
- Liikkuvuuden moottori

- Nopea harrastusmoottori
- Hihnakäyttöinen moottori
- Kolikkopelin moottori
- Pulssikäyttöinen
- Varren mukautettu moottori
- Bipolaarinen askelmoottori

Suuremmat moottorit soveltuvat parhaiten liikkumisalustoille, joiden avulla robotit voivat ohjata maastoa. Joissakin näistä moottoreista on vaihdelaatikot tuottamaan hitaampi nopeus ja vääntömomentti, jota tarvitaan liikkuvuuteen. Jännitteen alentaminen moottoriksi voi myös hidastaa sitä halutummalle nopeudelle. Vain kokeilu voi määrittää, toimiiko moottorisi pienemmällä jännitteellä. Jos näin tapahtuu, olet säästänyt itsellesi paljon vaivaa, jos ei, on olemassa muita tapoja hidastaa moottoreita. Joitakin suurnopeusmoottoreita voidaan käyttää, jos käytetään kierukkavaihteita tai ruuvivaihteita.
Esimerkki ruuvivaihteista voidaan nähdä robottivarren kuvassa. Kun moottori pyörii myötäpäivään, pulttikokoonpano vedetään moottoriin ja varsi supistuu ja kun se kääntyy vastapäivään, varsi ulottuu. Vaikka moottorin akseli pyörii nopeasti, varren toiminta on huomattavasti hitaampaa ruuvien vähentämisen takia. Tässä seuraavassa moottoripiirikuvassa näemme tasavirtamoottorin, jota ohjaa tehotransistori. Relekytkin (Double Pole Double Throw) määrittää suunnan. Transistorin Q1 tulisi olla tehotransistori ottamaan vastaan moottorin raskas kuorma.
Pulssimoottorit
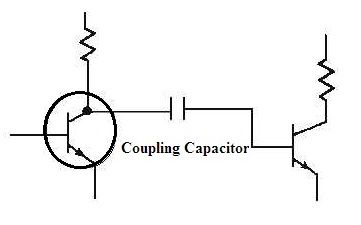
Jotkut moottorit saavat nopeuden alennuksen toimimalla pulssi-DC-signaalista. Tämä signaali on yleensä noin sata Hz. Moottorin nopeutta voidaan muuttaa muuttamalla pulssin leveyttä, ei muuttamalla pulssin taajuutta. Tällaisia moottoreita löytyy ylijäämäelektroniikkaliikkeistä, ja ne voidaan helposti tunnistaa siihen kytketyn pulssigeneraattorin avulla. Pulssilähteellä voidaan kuitenkin käyttää mitä tahansa tasavirtamoottoria, ja tällaisen piirin kaavio on mukana.
Kuten näette, käyttöoskillaattoriksi valittiin 555 ajastin, joka tuottaa noin 100 Hz: n taajuuden. Vastus R1 ja kondensaattori C vakauttavat ja eristävät pulssigeneraattorin moottorin tuottamista piikeistä. Koska tämä laite voi vetää 6 - 12 voltin virtalähteestä, kannattaa ehkä muuttaa kondensaattorin C4 ja C6 arvoa parempien tulosten saavuttamiseksi sen mukaan, mitä jännitettä käytät. Pulssilähtö otetaan IC1: n tapasta 3 ja syötetään IC2: n tapaan kaksi, myös 555-ajastin.
Toinen ajastin muuttaa pulssin leveyttä säätämällä jännitettä, joka syötetään kondensaattoriin C6 potentiometrin R5 ja vastuksen R6 kautta. Pulssin kesto määrää moottorin nopeuden, ja pulssin leveyttä voidaan säätää 10%: sta 100%: iin.
Transistori Q1 vastaanottaa pulssinleveydellä moduloidun signaalin vastuksen R7 kautta. Koska Q1 on matalavirtainen laite, se välittää signaalin Q2: lle, tehotransistorille, joka pystyy käsittelemään moottorin nykyiset vaatimukset. Nämä transistorit eivät ole kriittisiä, ja melkein minkä tahansa tyyppiset pienivirtaiset transistorit toimivat. Rele määrittää moottorin suuntaan.
Askelmoottorit
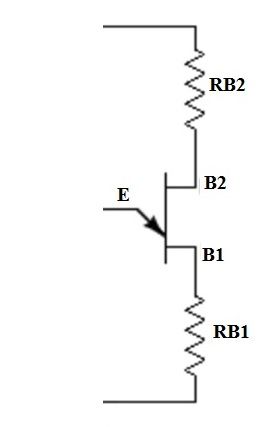
Kaikista moottoreista monimutkaisin on askelmoottori. Kuten nimestä päätetään, moottori pyörii asteittain ja sitä käytetään pulssilla. Tarkka kierrosaste askelta kohden voi vaihdella valmistajan tai mallin mukaan, mutta 20 astetta on suosittu ja tuottaa 18 askelta yhtä täydellistä käännöstä kohti. Askelmoottoreita on kahta perustyyppiä, bipolaarisia ja unipolaarisia. Kuten askelmoottorikaaviosta näet, kaksisuuntainen on yksinkertaisesti kaksikäämiinen moottori.
Yksinapainen tyyppi on kaksi kelaa, joissa on keskihanat. Jos keskihanoja ei oteta huomioon, unipolaarimoottori voi toimia kaksisuuntaisena. Askelmoottorin kahdelle kelalle syötetään vaihepulsseja vuorotellen polaarisesti kelasta kelaan. Toimintakaaviossa on tämän prosessin kartta, joka kuvaa graafisesti moottorin toimintaa. Toisin kuin tavanomaiset tasavirtamoottorit, vääntömomentti pienenee nopeuden myötä. Askelmoottorin etenemiseen tarvitaan myös erityinen käyttöyksikkö, ja se tulee toimittaa moottorin mukana. Ohjausyksikön rakentamista ei suositella, ellei moottorissa ole hyvä tekninen esite, jossa on komponenttisuositukset ja täydellinen kaavio.
Moottori voi tarvita puskureita sen eristämiseksi käyttöjärjestelmästä tai se voi tarvita erillisen virtalähteen. Tarpeista riippumatta ne voivat vaihdella huomattavasti moottorista toiseen. Harrastekaupat ovat luotettavimpia askelmoottoreiden toimittajia, ja vaikka ylijäämäisissä elektroniikkaliikkeissä niitä toisinaan voi olla, ne eivät välttämättä sisällä tarvittavia tietoja
Osittaiset kääntömoottorit
Jotkut robottitoiminnot vaativat vain osittaisen käännöksen, kuten pään tai käsivarsien liikkeet. Helpoin tapa saavuttaa nämä ovat asennon pysäyttimillä ja liukukytkimillä. Kuva tämän tyyppisen moottorin mekaanisista yksityiskohdista on annettu yllä. Mikrokytkimiä voidaan käyttää pysäytysantureina virran katkaisemiseksi ja seuraavan toiminnan suunnan palauttamiseksi.
Pohjapyörä on kytketty moottoriin, kun ylempi pyörä on erotettu pohjapyörästä pyöreällä huopalla. Kun alempi pyörä kääntyy, ylempi pyörä pyörii sen kanssa, kunnes jarrutappi tulee kosketukseen mikrokytkimen kanssa. Joissakin malleissa ei ole säännöksiä moottorin pysäyttämisestä, joten yksinkertaiset välikappaleilla varustetut ruuvit toimivat moottorin pysäyttäjinä.
Bio-moottori
Bio-metalli on hämmästyttävä aine, jota on käytetty muutaman vuoden ajan, ja sillä on useita sovelluksia robotiikan alalla. Kuvasta voidaan nähdä, että biometallilangan pala kutistuu viidellä prosentilla pituudestaan, kun vain muutama volttia käytetään sen yli. Vuosien testauksen jälkeen biolanka on osoittautunut vahvaksi, luotettavaksi ja yhä hyödyllisemmäksi uusien tuotteiden tullessa esiin. Sen hieman hitaampi vasteaika tekee siitä ihanteellisen robotti käsivarsi- ja käsisovelluksiin, joissa nykiminen olisi ongelmallista. Pitkä lanka voi tuottaa merkittävän liikkeen, kun se venytetään robottivarren koko pituudelta. Kaupallisilla markkinoilla on tällä hetkellä robottivarren sarjoja, joissa käytetään biometallia.
Bhaskar Singh
Markkinointipäällikkö
 Teollisuusrobotit ovat laitteita, jotka tietyssä määrin kopioivat ihmisen liikkeitä ja vähentävät vaaroja ja tarjoavat enemmän voimaa, tarkkuutta ja jatkuvuutta. He tarvitsevat laajan valikoiman moottorikäyttöisiä liikkeitä riippuen toimintatavoistaan, ohjauksestaan, käytetyistä työkaluista ja suoritettavasta työstä. Teollisella robottimoottorilla tulisi olla mahdollisuus hoitaa monenlaisia tehtäviä kuin normaaleilla moottoreilla erikoistumiseksi tiettyyn tehtävään.
Teollisuusrobotit ovat laitteita, jotka tietyssä määrin kopioivat ihmisen liikkeitä ja vähentävät vaaroja ja tarjoavat enemmän voimaa, tarkkuutta ja jatkuvuutta. He tarvitsevat laajan valikoiman moottorikäyttöisiä liikkeitä riippuen toimintatavoistaan, ohjauksestaan, käytetyistä työkaluista ja suoritettavasta työstä. Teollisella robottimoottorilla tulisi olla mahdollisuus hoitaa monenlaisia tehtäviä kuin normaaleilla moottoreilla erikoistumiseksi tiettyyn tehtävään.
Sähkömoottoreita käytetään yleisimmin teollisessa robotiikassa erittäin tehokkaan sähkönhankinnan ja suhteellisen yksinkertaisen suunnittelun ansiosta, mikä tekee niistä suositumman vaihtoehdon kustannus-suorituskyky-luokituksen suhteen kaikilla osa-alueilla - asennuksessa, kunnossapidossa ja huollossa.
Tarvittavasta työstä riippuen eri moottoreita käytetään eri tarkoituksiin. Esimerkiksi DC-moottoreita käytetään liikkeisiin myötä- ja vastapäivään, esimerkkejä nostureissa ja nostimissa, pulssimoottoreita käytetään tuottamaan pulssimaisia liikkeitä DC-pulssin leveydellä, osittaisia kääntömoottoreita käytetään pään ja käsivarren kaltaisten ja monimutkaisimpien liikkeiden aikaansaamiseen - askelmoottoreita käytetään portaiden kääntämiseen asteittain.
Lisäksi työtyypistä riippuen eri luokituksilla ja kooilla varustettuja moottoreita käytetään eri tarkoituksiin, ja on olemassa useita moottorityyppejä, joilla kaikilla on erilaisia sovelluksia eri paikoissa työn ja robotin suunnittelun mukaan.
Mohan Krishna. L
Myynti- ja tukijohtaja
Robotteja käytetään tekemään työtä, jonka ihmiset voivat tehdä, ja on monia syitä, miksi robotit ovat parempia kuin ihmiset. 
Robotteja on kahta päätyyppiä: -
Mobiilirobotti: Se liike jaloilla tai kappaleilla.
Kiinteä robotti: Siinä on kiinteä pohja.
Kiinteitä robotteja yleensä robotti-aseita voidaan käyttää esineiden poimimiseen tai muun työn tekemiseen, johon liittyy tavoittaminen esineelle.
Robottivarressa on kolme perusosaa: -
- Olkapäänivel
- Ranne
- Kiinteä pohja
Tarvitsetko robotin
- Kyky työskennellä nopeasti ja vaarallinen ympäristö.
- Kyky toistaa tehtäviä uudestaan ja uudestaan.
- Kyky työskennellä tarkasti.
- Kyky tehdä erilaisia tehtäviä.
- Tehokkuus.
Moottori on laite, joka muuntaa sähköenergian mekaaniseksi energiaksi, ts. Sähkömekaaniseksi laitteeksi. On olemassa kahden tyyppisiä moottoreita, kuten vaihtovirtamoottori ja tasavirtamoottori
Teollisessa robotiikassa käytetty moottori on servomoottori. Servomoottori on yksinkertainen sähkömoottori, jota ohjataan servomekanismin avulla.Jos ohjattua moottoria käytetään vaihtovirralla, sitä kutsutaan AC-servomoottoriksi, muuten DC-servomoottoriksi.Ensimmäinen servomoottori voi pyöriä noin 90--180 astetta. Täysi 360 astetta tai enemmän. Jotkut servomoottorin sovelluksista robotiikassa ovat
- Servomoottorisovellus robotissa, eli yksinkertainen poimi- ja sijoitusrobotti, sitä käytetään kohteen valitsemiseen yhdestä paikasta ja kohteen sijoittamiseksi eri asentoon.
- Kuljettimien servomoottoria käytetään
- teollisuudessa Yksiköiden valmistus ja kokoaminen kohteen siirtämiseksi kokoonpanoasemalta toiselle. Esimerkiksi: - pullon täyttöprosessi.
- Servomoottori robottiajoneuvossa tässä Pyörissä käytetty servomoottori. Koska käytetään jatkuvan pyörimisen servomoottoria.
Dinesh.P
Markkinointipäällikkö
 Robotit otetaan käyttöön vähentämään ihmisten kovaa työtä ja auttamaan luomaan ihmisille onnea tulevaa kehitystä varten. Termi robotit tarkoittavat konetta, joka jäljittelee ihmisen erilaisia ominaisuuksia. Robotiikka sisältää kone-, elektroniikka-, sähkö- ja tietojenkäsittelytieteen tietämyksen. Roboteissa käytettyjä moottoreita ovat DC-moottorit, Askelmoottorit ja Servomoottorit
Robotit otetaan käyttöön vähentämään ihmisten kovaa työtä ja auttamaan luomaan ihmisille onnea tulevaa kehitystä varten. Termi robotit tarkoittavat konetta, joka jäljittelee ihmisen erilaisia ominaisuuksia. Robotiikka sisältää kone-, elektroniikka-, sähkö- ja tietojenkäsittelytieteen tietämyksen. Roboteissa käytettyjä moottoreita ovat DC-moottorit, Askelmoottorit ja Servomoottorit
Missä,
- DC-moottoreita käytetään jatkuvaan pyörimiseen
- Askelmoottoreita käytetään muutaman asteen pyörimiseen
- Servomoottoreita käytetään paikannukseen, sitä voidaan käyttää autoissa ja lentokoneissa
Ganesh .J
Markkinointipäällikkö 
Robotteja käytetään tekemään työtä, jonka ihmiset voivat tehdä, ja ne vähentävät myös ihmisen työtä ja aikaa sekä parantavat laatua.
- Vaihtovirta (AC) moottorit
- Tasavirta (DC) moottorit
- Servomoottorit
- Askelmoottorit.