
TO robotti on sähkömekaaninen kone robotit ovat vaihtaneet ihmisiä auttamaan suorittamaan jatkuvia ja vaarallisia tehtäviä, joita ihmiset eivät halua tehdä. Esittää robotit luokitellaan eri luokkiin niiden ominaisuuksien ja suorituskyvyn perusteella, kuten teollisuusrobotit, kaupalliset robotit, palvelurobotit, mobiilirobotit. Tässä on palvelurobotti, joka suorittaa jatkuvia tehtäviä toivottaakseen ihmiset tervetulleiksi kädenliikkeellä, joka edustaa ”Namaste” -tallennettua ääniviestiä. Yleensä kun kutsumme ihmisiä kotiin, juhliin, avioliittotoimintoihin, toimistoon jne. Meidän on järjestettävä henkilö tervehtimään ja kutsumaan heidät sisäänkäynnille. Jos ihmisten määrä on pieni, tehtävä on yksinkertaisempi. Mutta jos tervehdit satoja ihmisiä, tehtävä on vaikea. Tämän ongelman voittamiseksi tässä on projekti, nimeltään robotti, jolla on ääniohjaus.

Namaste-robotti
Namaste-robotti ääniohjauksella
Tämän Namasten pääkonsepti robottihanke on ohjata erilaisia servomoottoreita Arduino-levyn kautta. Tämä robotti skannaa ympäröiviä ihmisiä ja kiertää päänsä ympäri 180 °. Jos se tunnistaa jonkun lähellä olevasta, niin se toivoo Namastea sairastavalle henkilölle molemmat kädet painamalla. Se on perinteinen tapa toivoa ihmisiä Intiassa. robottien sovellukset osallistua ostoskeskuksiin, puistoihin, toimistoihin ihmisten houkuttelemiseksi.
Lohkokaavio Namastae-robotista ääniohjauksella
Seuraava kuva on ääniohjattavan Namaste-robotin lohkokaavio. Tällaisessa robotissa äänikomennot on ohjelmoitu. Koko kehityskortti voidaan kytkeä yhteiseen virtalähteeseen. Jokaisen lohkon kuvaus on seuraava. virtalähde antaa virtalähteen kaikille moduuleille. Nämä moduulit vaativat virtaa mA: ssä ja käyttöjännite on 5 V.

Lohkokaavio Namastae-robotista ääniohjauksella
Arduino-lauta
Arduino on eräänlainen työkalu perustuu yksinkertaiseen mikrokontrollerikorttiin, jota käytetään fyysisen maailman hallintaan ja aistimiseen kuin pöytätietokoneeseen. Fyysistä tietojenkäsittelyä varten on saatavana useita mikrokontrollerialustoja. Arduinon tärkeitä ominaisuuksia ovat halpa, avoimen lähdekoodin ja laajennettava ohjelmisto. Arduino-ohjelmisto on saatavana avoimen lähdekoodin työkaluna ja kieltä voidaan laajentaa C ++ -kirjastojen kautta.

Arduino-lauta
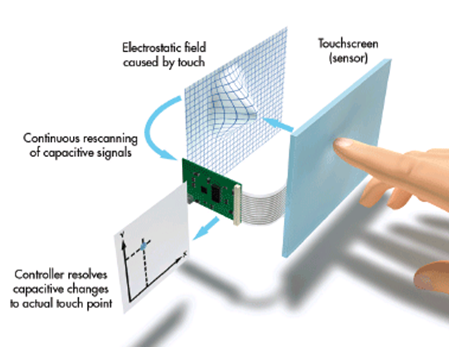
Ping-anturi
Ping-anturi ohjaa SONAR-sovelluksella sen läheisyydessä olevan kohteen etäisyyttä. Tämä anturia käytetään robotin silmät havaitsemaan esteen, esimerkiksi läheisyysanturi. Se antaa erinomaisen etäisyystarkkuuden ja vakaan lukeman. Musta materiaali tai auringonvalo eivät vaikuta tämän anturin toimintaan. Ping-anturin tekniset tiedot ovat jännite 5 V, virta 15 mA, anturin kulma EI> = 15 ja tunnistusetäisyys on 2 cm ~ 450 cm.

Ping-anturi
Ping-anturin ja Arduinon rajapinta näkyy alla. On olemassa neljä nastaa, jotka voivat liittää ping-anturin Arduino-korttiin. Arduino-levyn neljä nastaa ovat GND, VCC, ECHO ja TRIGGER. Piirilevyn nastat ovat D0-D13, koska 12 ja 13 nastaa ovat tulo- ja lähtönippejä.
Arduino-mikrokontrolleri tarjoaa meille servo-ohjauskirjaston, jonka avulla voimme vaihtaa servoja helposti. Tässä projektissa käytimme 5 servoa säätämään Namaste-robotin liikkeitä, kuten pää, oikea kyynärpää, vasen kyynärpää, oikea olkapää ja vasen olkapää. Tässä digitaalitulo- / lähtönastat (D5, D6, D9, D10, D1) merkitsevät Arduino-kortissa, joka on liitetty servomoottoreihin.
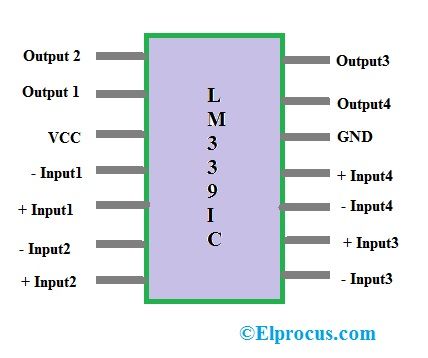
Äänentoiston IC
Tämä äänentoisto-IC tarjoaa tallennetun viestin, joka toistetaan ennalta määrätyllä taajuudella. Toisto siirretään äänenvahvistinyksikköön.

Äänentoiston IC
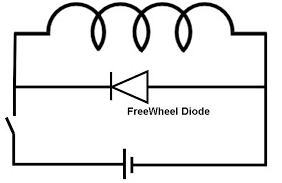
Rele
TO rele on eräänlainen kytkin toimii sähköisesti. Virran virta releen kelan läpi muodostaa magneettikentän, joka kutsuu vipua ja vaihtaa kytkinkoskettimia.

Rele
Ääniohjaus Namastae-robotti toimii
Namaste-robotin työ voidaan suorittaa vaiheittain simuloitujen tulosten mukana. Kun Namaste-robotti on ensimmäisessä tilassa, niin servomoottori Robotin 2, 3, 4, 5 s ovat OFF-tilassa tai nolla-tilassa. Namaste-robotin pää vaihtuu keskeltä oikealle, vasemmalle ja sitten takaisin keskelle Servomoottorin1 pyörimisen vuoksi 0 ° -180 °. Robotin pään liike kertoo, että Namaste-robotti etsii estettä. Kun ping-anturi havaitsee esteen, robotin pääasento palaa keskelle ja Servomoottori1 reliikit 90 ° kulmassa ja sammuu. Se aktivoidaan LOW-tilassa.
Kun servomoottori1 sammuu, muut moottorit, kuten servo4 ja servo5, kytkeytyvät päälle. Signaalilinja laukeaa Namaste-robotin oikealle ja vasemmalle hartialle. Nyt robotin kädet voivat saada liikkeen ylös. Olkapalvelinmoottorit on liitetty Arduino-kortin digitaalisiin tulo- ja lähtöliittimiin. Signaalilinjat tai nämä nastat ovat kuitenkin korkealla ja servon sijainti muutetaan 90 °. Nyt servo4 ja servo 5 sammuvat.
Lopuksi voimme päätellä, että tämän ääniohjauksen päätavoite robotti on tarjota palvelua toivottaa ihmiset tervetulleiksi kohteliaasti havaitsemalla sen edessä käveleviä ihmisiä. Sitä voidaan käyttää useissa julkisissa paikoissa, kuten puistoissa, ostoskeskuksissa, juhlissa jne. Toivomme, että olet saanut paremman käsityksen tästä käsitteestä. Lisäksi kaikki tämän käsitteen tai arduino-pohjaiset kysymykset robottiprojektit , anna arvokkaat ehdotuksesi kommentoimalla alla olevassa kommenttiosassa.
Valokuvahyvitykset:
- Arduino-lauta nyacknewsandviews
- Ping-anturi parallaksi
- Äänentoiston IC kealab
- Rele awdirect
- Namaste-robotti canstockphoto








{kind=link}
{kind=link}
{kind=link}
{kind=link}