Servomoottorit ovat itsenäisiä mekaanisia laitteita, joita käytetään koneiden hallintaan erittäin tarkasti. Niitä löytyy monista sovelluksista leluista teollisuusautomaatioon. Moottoreita on erilaisia, mutta servomoottorit on erityisesti suunniteltu tiettyyn kulma-asemaan koneiden ohjaamiseksi. Yleensä servomoottoria käytetään kulmaliikkeen ohjaamiseen välillä 0 ° - 180 ° ja 0 ° - 90 °. servomoottorin toimintaperiaate perustuu PWM: ään ( pulssinleveysmodulaatio ) pulsseja.

Servo moottori
Servomoottorin liitäntä 8051-mikrokontrolleriin
Servomoottori on yksi yleisimmin käytetyistä moottoreista tarkkaan kulmaliikkeeseen. Servomoottorin käytön etuna on, että moottorin kulma-asemaa voidaan ohjata ilman takaisinkytkentämekanismia. Servomoottoreita käytetään yleensä kaupallisiin ja teollisiin sovelluksiin . Niitä käytetään myös laajalti kuten käyttöjärjestelmissä, kuten robotit, lentokoneet jne.

Servo-moottorin ja 8051-mikrokontrollerin liitäntä
Hobby-servomoottorin toimintaperiaate ja toiminta ovat hyvin yksinkertaisia, se koostui kolmesta johtimesta, joista kahdesta (musta ja punainen) käytettiin virtaa ja kolmannesta johtimesta ohjaussignaalia. Pulssileveyden moduloituja (PWM) aaltoja käytetään ohjaussignaaleina ja kulma-asema on määritelty ohjaustulossa olevan pulssin leveydellä. Tässä artikkelissa käytämme servomoottoria, jonka kiertokulma on 0-180 ° ja kulma-asentoa voidaan ohjata vaihtelemalla käyttöjaksoja 1 ms - 2 ms välillä.
Tässä servomoottori on yhteydessä 8051-mikrokontrolleri , maadoitustappiin kytketty musta johto ja moottori saavat virran punaisesta johtimesta. 8051-mikrokontrollerin servomoottoriin liitetyn portin 0 ohjaus. 11,0592 MHz: n kideoskillaattoria käytetään antamaan mikro-ohjaimelle pulssitettu kello ja 22pf-keraamisille kondensaattoreille, joita käytetään kiteen toiminnan vakauttamiseen. 10KΩ- ja 10uf-kondensaattoreita käytetään virran palauttamiseen mikrokontrollerille.
Servomoottorin ohjaaminen kulman kiertämisellä
Servomoottorin toimintaperiaate riippuu pääasiassa käyttöjaksoista. Se käyttää pulssileveysmoduloituja (PWM) aaltoja ohjaussignaaleina. Kiertokulma ratkaistaan ohjaustapin pulssin leveydellä. Tässä servomoottori, jota käytetään kiertokulmaan 0-180 astetta. Voimme hallita tarkkaa kulma-asemaa vaihtelemalla pulssin välillä 1 ms - 2 ms.

Servomoottorin ohjaaminen kulman kiertämisellä
Servomoottorin ohjelmointi kulmakierroksilla
#sisältää
Sbit-servomoottorin_tappi = P0 ^ 5
Tarpeeton viive (allekirjoittamaton int)
Void servo_delay (allekirjoittamaton int)
Tarpeeton pää ()
{
Servomoottorin tappi = 0x00
Tehdä
{
// käännä 0 °
Servomoottorin tappi = 0x01
Helsinki (50)
Servomoottorin tappi = 0x00
Viive (1000)
// käännä 90 astetta
Servomoottorin tappi = 0x01
Helsinki (82)
Servomoottorin tappi = 0x00
Viive (1000)
// käännä 180 asteeseen
Servomoottorin tappi = 0x01
Sevo_viive (110)
Servomoottorin tappi = 0x00
Viive (1000)
Vaikka (1)
}
}
Tarpeeton viive (allekirjoittamaton int a)
{
Allekirjoittamaton int s
Sillä (p = 0p
}
Void servo_delay (allekirjoittamaton int a)
{
Allekirjoittamaton int s
Sillä (p = 0p
}
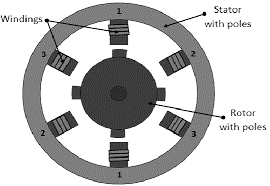
Servomoottorin toimintaperiaate
Servomoottorin toimintaperiaate riippuu pääasiassa Flemingin vasemman käden säännöstä. Periaatteessa servomoottorit on mukautettu DC-moottorit , asentoanturi, vaihteiden vähennys ja elektroninen piiri. DC-moottorit saavat virtansa akusta ja toimivat suurella nopeudella ja pienellä vääntömomentilla. Asensimme tasavirtamoottoreihin kytketyn akselin ja vaihdeen, jolloin voimme lisätä ja laskea moottorin nopeutta asteittain.
Asentoanturi tunnistaa akselin sijainnin kiinteästä asemastaan ja lähettää tiedot ohjauspiiriin. Ohjauspiiri purkaa signaalit sijaintianturista vastaavasti ja vertaa moottoreiden todellista sijaintia edulliseen asemaan ja ohjaa vastaavasti tasavirtamoottorin pyörimissuuntaa tarvittavan aseman saamiseksi. Yleensä servomoottori vaatii 4,8 V - 6 V tasavirtalähteen.
Servomoottori, jota ohjataan sarjaporttikomennoilla
Tämän projektin päätarkoitus on ohjata servomoottoria henkilökohtaisen tietokoneen avulla. Se tarvitsee yhden ohjausjohdon mikrokontrollerista ja sarjaportista, henkilökohtaisen tietokoneen sarjaportista komentojen lähettämiseksi piirille. Ajoituslähteen tarjoaa kideoskillaattori. Suunniteltu servomoottoripiiri, joka on liitetty tietokoneeseen sarjakaapelin ja tasokytkimen avulla, avaa sitten tietokoneessa oleva Hyper Terminal -ohjelmisto valitaksesi tietokoneen kokoonpanon.

Servomoottorin ohjaus sarjaporttikomennoilla
Kun komennot on lähetetty henkilökohtaisesta tietokoneesta mikrokontrolleriin hyperterminaalin kautta tasonsäätimellä, mikro-ohjain hankkii nämä tiedot ja vertaa niitä ennalta määritettyihin tietoihin ja tuottaa vastaavat signaalit aktivoidakseen moottoriohjaimen ajamaan sitä haluttu nopeus. Monet mikro-ohjainprojektit kehitetty servomoottorien, kuten tasapainotusrobottien, kiitotien helikoptereiden ja niin edelleen, perusteella. Voimme käyttää servomoottoria turvallisuustarkoituksiin olemalla yhteydessä langattomaan kameraan, koska voimme ohjata kameran 360-suuntausta.
Itsetasapainottava robotti
Itsetasapainottava robotti pystyy tasapainottamaan itseään servomoottoreiden avulla. Tämä robotti on koottu käyttämällä rakenteellisia, mekaanisia ja elektronisia komponentteja, mikä tuottaa näkyvästi epätasapainoisen alustan, joka on erittäin taipuvainen kaatumaan yhteen suuntaan. Robotin pyörät pystyvät pyörimään itsenäisesti kahdella tavalla, joita ajaa servomoottori. Tietoja laitteen kulmasta suhteessa maahan saadaan osoitteesta kallistusanturit laitteessa.

Itsetasapainottava robotti
Kallistusanturi voi olla kiihtyvyysanturi, gyroskooppinen anturi tai IR-anturi (etäisyyden mittaamiseksi maahan). Anturit lähettävät informaatiota ohjausyksikölle, joka käsittelee palautetta käyttämällä suhteellista, integroitua, johdannaista (PID) -algoritmia kompensointiasennon ohjaussignaalien generoimiseksi servomoottoreille laitteen tasapainottamiseksi.
Servomoottorisovellukset
- Sitä käytetään puristuskoneissa kappaleiden leikkaamiseen koon mukaan
- Sitä käytetään sokerin täyttöasemalla
- Sitä käytetään etikettisovelluksissa
- Sitä käytetään pakkausjärjestelmässä, jossa on satunnainen ajastustoiminto
- Sitä käytetään Käytetään lentokoneissa
Servomoottorin edut
- Jos moottori saa raskasta kuormaa, kuljettaja lisää moottorin kelan virtaa pyrkiessään pyörittämään moottoria. Pääasiassa ei ole vaiheittaista ehtoa.
- Nopea käyttö on mahdollista servomoottoreilla.
Tässä on kyse servomoottorin toimintaperiaatteesta ja 8051-mikrokontrollerin kanssa Lisäksi tämän artikkelin tai elektroniikkaprojektit jotka on suunniteltu käyttämällä rajapintalaitteita, kuten RTC, OLED, flash-muisti, räätälöity LCD-näyttö, kosketusnäytön näytöt jne. Voit ottaa meihin yhteyttä antamalla kommenttisi alla olevassa kommenttiosassa.