Tässä viestissä keskustelemme nelikoptereiden rungon kokoonpanon perusteista alumiiniputkien ja pulttien avulla, artikkelin myöhemmissä kohdissa keskustelemme myös yksinkertaisesta drone-piiristä, jota voitaisiin käyttää pienen drone-kokoonpanon lentämiseen monimutkaisista mikro-ohjaimista riippumattomasti.
Nelikopteri on ehkä yksinkertaisin lentokone, joka vaatii vähimmäismäärän aerodynaamista tarkkuutta ja komplikaatioita, ja siksi ei ole mikään yllätys, se voi saavuttaa valtavan suosion niiden harrastajien keskuudessa, jotka pystyvät rakentamaan tämän onnistuneesti .... kone, jolla he todella voisivat lentää ja hallita omasta tahdostaan.
Quadcopter Dynamics
Se tosiasia, että nelikopterikone on teknisesti ja dynaamisesti yksinkertaisin, johtuu tosiasiallisesti 4 potkurista ja tasapainoisesta runkorakenteesta, jotka mahdollistavat koneen lentämisen suhteellisen hyvällä tasapainolla jopa vaikeissa ilmasto-olosuhteissa.
Mutta yksinkertaisuus merkitsee myös sitä, että järjestelmä ei ehkä ole yhtä tehokas kuin perinteiset lentokone- ja helikopterimallit, jotka on suunniteltu monimutkaisesti osoittamaan äärimmäistä tehokkuutta nopeuden ja polttoaineenkulutuksen sekä tietysti kantokyvyn suhteen ... nämä kaikki voivat olla olennaisesti puuttuu tyypillinen nelikopterijärjestelmä.
Harrastushankkeesta huolimatta tästä koneesta tulee ihanteellinen valinta useimmille harrastajille, joiden mielestä on erittäin hauskaa ja kiehtovaa rakentaa oma lentokone koneen kotiin, joka lopulta 'kuuntelee' ja lentää mihin tahansa suuntaan käyttäjä haluaa sen liikkuvan.
Uuden pelaajan, joka ei ehkä ole teknisesti niin perillä, voi kuitenkin löytää tämänkin yksinkertaisen koneen erittäin monimutkaisen ymmärtää yksinkertaisesti siksi, että suurin osa monilla verkkosivustoilla esitetyistä vastaavista tiedoista ei pysty keskustelemaan käsitteestä selkeästi ja 'kielellä', saattaa sopia maallikolle.
Tämä artikkeli on kirjoitettu erityisesti niille ei-niin teknisille ihmisille, jotka ovat kiinnostuneita rakentamaan upean lentokoneen, mutta pitävät aihetta liian vaikeasti sulavana.
Miksi nelikoptereita on niin helppo rakentaa tänään
Oletko koskaan miettinyt, miksi nelikoptereita ja droneja on niin helppo rakentaa nykymaailmassa ja mikä oli ehkä mahdotonta aikaisemmin käyttämällä sähköä?
Se johtuu pääasiassa litiumioniakkujen kehittämisestä ja parantamisesta. Nämä ovat nykyään erittäin tehokkaita paristoja, jotka tarjoavat vaikuttavan teho-painosuhteen. Tämän lisäksi BLDC-moottoreiden ja erittäin hienostuneiden kestomagneettimoottoreiden keksiminen on myös auttanut tekemään droneista helposti rakennettavia.
Li-Ion-akku pystyy tarjoamaan moottoreille mahtavan määrän kiertomomenttia, joka riittää työntämään quadcopter-yksikön korkealle maanpinnan yläpuolelle sekunneissa, ja antaa sen myös pysyä ilmassa pitkään aikaan suorituskyky erittäin tehokas ja hyödyllinen.
Kuinka nelikopteri lentää
Hypätään nyt oikealle ja ymmärretään, mitkä ovat olennaisia asioita, joita tarvitaan, jotta nelikopteri lentää onnistuneesti. Tässä on perusteet koneen sujuvaan lentämiseen:


1) Periaatteessa kone vaatii lujan ja vahvan rungon, mutta erittäin kevyen painon. Tämä voidaan valmistaa tai koota käyttämällä onttoja neliönmuotoisia alumiinipuristusputkia poramalla sopivasti reikiä ja kiinnittämällä runko muttereilla ja pultteilla.
2) Rakenteen tulisi olla täydellisen ”+” tai ”täydellisen” x: n muotoinen, sillä ei ole eroa niin kauan kuin ristikkäisten putkien välinen kulma on 90 astetta kussakin.

Quadcopterin rakentamiseen tarvittavat peruselementit näkyvät seuraavassa kuvassa:

Osien kokoonpanosimulaatio
Alla oleva karkea animoitu simulaatio osoittaa, kuinka yllä esitetyt elementit kootaan yhteen:

Kuinka rakentaa Quadcopter Framework
+ -Rungon alumiini voidaan hankkia leikkaamalla ja mitoittamalla valmiit alumiinipuristeputket alla esitetyllä tavalla:

Rungon koko on suhteellinen eikä siksi ole välttämätöntä. Voit rakentaa laajan rungon moottoreiden kanssa toisistaan erillään tai rakentaa melko pienikokoisen runkorakenteen, jos moottorit eivät ole liian leveät toisistaan ... vaikka on varmistettava, että potkurit ovat kaukana toisistaan paremman tasapainon ja tasapainon mahdollistamiseksi.
3) '+' -runkorakenne on varustettava neliönmuotoisella alustalla keskiosassa, jossa runkovarret kohtaavat ja ylittävät toisensa. Se voi olla yksinkertaisesti hyvin kiillotettu alumiinilevy, joka on mitoitettu sopivasti kaiken tarvittavan elektroniikan ja johdotuksen mukauttamiseksi.
Siksi tätä keskuslevyä tai alustaa tarvitaan pohjimmiltaan järjestelmän elektroniikan asentamiseen ja sijoittamiseen, mikä olisi viime kädessä vastuussa nelikopterisi ohjaamisesta.
4) Kun yllä oleva runko on valmis, moottoreiden on kiinnitettävä poikkitankojen päiden yli, kuten yllä olevissa kuvissa on esitetty.
5) On tarpeetonta sanoa, että kaikki asennustyöt on tehtävä äärimmäisen tarkasti ja täydellisesti, mikä saattaa edellyttää kokeneen valmistajan liittymistä työhön.
Koska kaikki suunnittelussa on pareittain, elementtien tarkka kohdistus ei ole oikeastaan liian vaikeaa, vaan kyse on vain parien mitoittamisesta ja sovittamisesta mahdollisimman samankaltaisesti, mikä puolestaan varmistaa maksimaalisen tasapainon, tasapainon ja synkronoinnin järjestelmälle.
Kun kehys on rakennettu, on aika integroida elektroniset piirit asiaankuuluviin moottoreihin. Tämä on tehtävä annetussa piirikäsikirjassa annettujen ohjeiden mukaisesti.
Piirilevyt voidaan asentaa keskuslevyn alaosaan sopivalla kotelolla tai levyn päälle, jälleen sopivalla kaapilla sen tiiviiseen kiinnittämiseen.

Potkurien pyörimissuunnan ymmärtäminen
Analysoidaan moottoripotkurien pyörimissuunta tasapainotetulle nostolle:
Viitaten yllä olevaan animoituun simulointiin, moottoripotkurien pyörimissuunta tulee kohdistaa seuraavasti:
Sen on yksinkertaisesti oltava sellainen, että yhden tangon päissä olevien moottoreiden tulisi olla identtiset mutta erilaiset kuin toisen tangon moottorin suunnassa, mikä tarkoittaa, että jos yhdellä tangolla moottorit pyöritetään myötäpäivään, toisen moottorin päissä olevat moottorit täydentävät toisiaan sauva on viritettävä pyörimään vastapäivään. suunta.
Yllä olevasta simulaatiosta ymmärrät oikein moottoreiden vastavoimaisen liikkeen, jota voidaan tarvita moottoreille osoittamiseksi tasapainotetun otoksen varmistamiseksi.
Kuinka ohjata quadcopterin suuntaa säätämällä moottoreiden nopeutta.
Kyllä, quadcopterin lentosuuntaa voidaan säätää ja ohjata oman toiveesi mukaan ja yksinkertaisesti soveltamalla eri nopeuksia (RPM) kyseisiin moottoreihin.
Seuraavat kuvat osoittavat, kuinka perusnopeudensiirtoa voidaan soveltaa asiaankuuluviin moottoreihin halutun lentosuunnan saavuttamiseksi ja toteuttamiseksi koneelle:




Kuten yllä olevissa kaavioissa on osoitettu, pienentämällä sopivasti moottorisarjan nopeutta tai lisäämällä vastakkaisen moottorisarjan nopeutta tai säätämällä nopeuksia omien mieltymystensä mukaan, nelikopteri voidaan saada kulkemaan ilmassa missä tahansa haluttu tietty suunta.
Yllä olevat kuvat osoittavat perussuunnat, kuten eteenpäin, taaksepäin, oikealle, vasemmalle jne., Mutta mikä tahansa muu pariton suunta voidaan myös toteuttaa tehokkaasti säätämällä sopivasti kyseisten moottoreiden nopeuksia tai se voi olla vain yksi moottori.
Esimerkiksi koneen pakottamiseksi lentämään suuntaan N / W vain S / E-moottorin nopeutta voidaan lisätä ja koneen lentämiseksi N / E-suuntaan S / N-nopeutta voidaan lisätä. W-moottoria voidaan lisätä ... ja niin edelleen. Sitä on vain harjoiteltava, kunnes käyttäjän on mahdollista saavuttaa ja hallita quadcopterin täydellinen hallinta.
Käytännöllisen nelikopterin suunnittelu
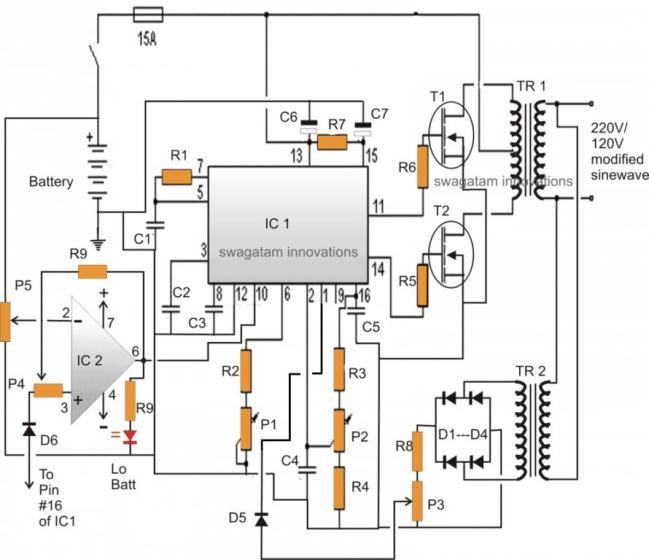
Toistaiseksi olemme oppineet drone-rungon ja laitteiston perusrakenteesta, nyt opitaan tekemään kvadrokopteri tai drone-piiri nopeasti ja edullisesti hyvin tavallisilla komponenteilla. Yhdessä aikaisemmista kirjoituksistani opimme, kuinka tehdä suhteellisen monimutkainen ja siksi tehokas nelikopterilentokone ilman mikro-ohjainta. Lisätietoja haluat käydä läpi seuraavat viestit:
Kaukosäädinpiiri ilman MCU: ta Elektroninen piiri
Tässä artikkelissa yritämme tehdä yllä olevasta suunnittelusta paljon yksinkertaisemman poistamalla harjattomat moottorit ja korvaamalla ne harjattuilla moottoreilla ja siten mahdollistamalla eroon monimutkaisesta BLDC-ohjainpiirimoduuli .
Koska nelikopterin mekaanisista rakenteellisista yksityiskohdista on jo keskusteltu yllä kattavasti, käsittelemme vain piirin suunnitteluosaa ja opimme, miten se voidaan rakentaa ehdotetun yksinkertaisimman drone-piirin lentämiseen.
Kuten aiemmin mainittiin, tämä yksinkertainen nelikopteri vaatii vain RF-kaukosäätimen perusmoduulit, kuten alla olevassa esimerkkikuvassa näkyy:

Sinun täytyy osta nämä RF-moduulit mistä tahansa verkkokaupasta tai paikalliselta elektroniselta varaosamyyjältä:
Edellä mainittujen lisäksi RF-kaukosäätimet Tarvitaan myös 4 kestomagneettiharjattua moottoria, jotka todella muodostavat drone-koneen sydämen. Se voi olla määritelty seuraavassa kuvassa annetuilla kuvauksilla tai mikä tahansa muu vastaava vaadittujen käyttäjän määritysten mukaisesti:

Moottorin sähköiset tiedot:
- 6 V = käyttöjännite (huippu 12 V)
- 200mA = käyttövirta
- 10000 = kierrosluku
Osaluettelo
- 1K, 10K 1/4 wattia = 1 kpl
- 1uF / 25V kondensaattori = 1no
- Esiasetettu 10K tai 5K = 1no
- Rx = 5 watin lankavastus, arvo vahvistetaan kokeilla.
- IC 555 = 1 ei
- 1N4148 Diodit = 2nos
- IRF9540 Mosfet = 1no
- 6V moottoriharjattu tyyppi = 4nos
- Joustavat johdot, juote, juoksutus jne.
- Yleiskäyttöinen piirilevy yllä olevien osien kokoamiseen
- 4-kanavainen RF-kaukosäädinmoduuli, kuten asiaankuuluvissa kuvissa näkyy.
- Alumiinikanavat, ruuvit, mutterit, levyt jne., Kuten artikkelissa selitetään.
- Akku alla olevan kuvan mukaisesti:

Kaukosäätimen vastaanottimen konfigurointi moottoreilla
Ennen kuin ymmärrät kuinka kauko-ohjaimen vastaanotin määritetään nelikopterimoottoreilla, on tärkeää oppia, kuinka moottorin nopeuksia on tarkoitus säätää tai kohdistaa vaadittujen vasemmalle, oikealle, eteenpäin, taaksepäin suuntautuvien liikkeiden muodostamiseksi.
Lähinnä on kaksi tapaa, jolla nelikopteri voidaan sallia liikkumiseen, jotka ovat plus- ja x-tilassa. Suunnittelussamme käytämme dronemme perusliikkeitä +, kuten seuraavassa kaaviossa on esitetty:

Viitaten yllä olevaan kaavioon ymmärrämme, että meidän on yksinkertaisesti lisättävä asianmukaisten moottoreiden nopeuksia sopivien suuntaliikkeiden suorittamiseksi droneilla.
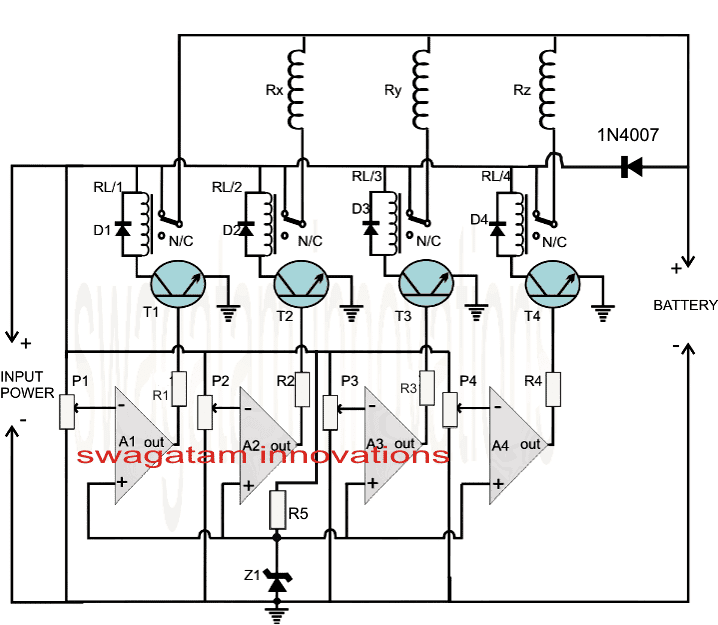
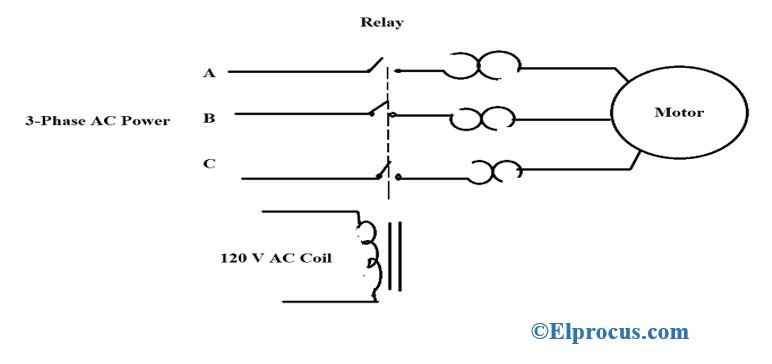
Tämä nopeuksien lisäys voidaan toteuttaa konfiguroimalla kaukosäätimen releet seuraavan kytkentäkaavion mukaisesti. Alla olevassa kaaviossa voimme nähdä IC 555 PWM-piiri johdotettu 6 releen kauko-ohjaimen vastaanottimen moduulin 4 releellä (1 rele on käyttämätön ja se voidaan yksinkertaisesti poistaa tilan ja painon lisäämiseksi).
PWM: n säätäminen
Kuten kaaviosta voidaan todeta, PWM-syöttö on kytketty kaikkiin releiden N / C-koskettimiin, mikä tarkoittaa, että normaalisti nelikopteri leijuu tämän yhtenäisen ja tasaisen PWM-syötteen läpi, jonka käyttöjakso voidaan aluksi säätää siten, että nelikopteri pystyy saavuttamaan oikean määrätyn työntövoiman ja korkeuden.
Tätä voidaan kokeilla säätämällä asianmukaisesti esitetty PWM-potti.
Kuinka välityskontaktit määritetään
Releiden N / O-koskettimet voidaan nähdä kytkettynä suoraan positiiviseen syöttöön, joten aina kun vastaavaa painiketta painetaan kauko-ohjaimen luurissa, vastaava rele aktivoituu vastaanotinmoduulissa, mikä puolestaan antaa asianomaiselle moottorille mahdollisuuden täyden 12 V: n virransyötön akusta.
Yllä oleva toiminta antaa aktivoidulle moottorille nopeamman nopeuden kuin muut moottorit, mikä sallii quadcopterin liikkua määrättyyn suuntaan.
Heti kun kaukosäätimen painike vapautetaan, drone pysähtyy välittömästi ja jatkaa leijumista vakiotilassa.
Samoin muut suuntaliikkeet voidaan saavuttaa yksinkertaisesti painamalla muita kaukosäätimen painikkeita.
Ylärele on koneen turvallisen laskeutumisen varmistamiseksi, tämä tapahtuu lisäämällä sarjaan virran pudotusvastus esitetyn releen N / O-koskettimen kanssa.
Tämä vastuksen arvo on laskettava joillakin kokeilla niin, että kvadrokopteri leijuu parin jalan korkeudella maanpinnan yläpuolella aina, kun tämä vastus kytketään liitetyn releen läpi.
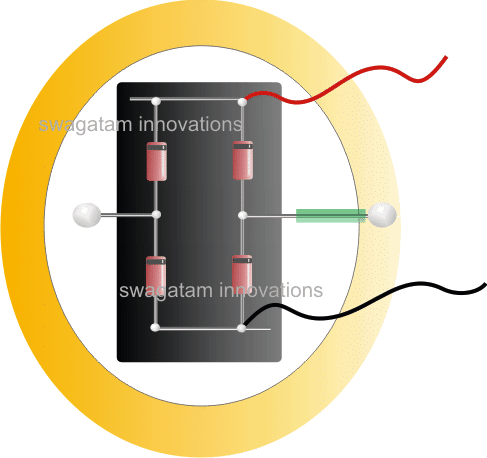
Piirikaavio

Esitetyt releet ovat RF-moduulivastaanottimen osa, jonka koskettimet eivät ole aluksi kytkettyinä (oletusarvoisesti tyhjät) ja jotka on kytkettävä johtoon yllä olevan kaavion mukaisesti.
RF-kaukovastaanottimen on tarkoitus asentaa kvadrokopterin sisälle ja sen releet on kytkettävä vastaavilla moottoreilla ja akulla yllä olevan kuvan mukaisesti.
Näet muutaman liittimen (vihreät), jotka voivat tarpeettomasti lisätä painoa dronelle. Voit poistaa ne kaikki painon vähentämiseksi ja liittää tarvittavat johdot suoraan piirilevyyn juottamalla.
Kuinka drone liikkuu:
Kuten edellisessä keskustelussa on selitetty, kun tiettyä kaukosäätimen painiketta painetaan, se aktivoi vastaavan quadcopter-moduulin releen, jolloin kyseinen moottori liikkuu nopeammin.
Tämä toiminto puolestaan pakottaa koneen liikkumaan vastakkaiseen suuntaan kuin moottori, jota vaihdetaan pyörimään nopeammin kierrosluvulla.
Esimerkiksi eteläisen moottorin nopeuden lisääminen saa koneen liikkumaan pohjoiseen, pohjoisen moottorin lisääminen saa sen etelään, samalla tavoin itäisen moottorin nopeuden lisääminen saa sen liikkumaan länteen ja päinvastoin.
Mielenkiintoista on, että etelä / itämoottoreiden lisääminen antaa kvadrokopterille mahdollisuuden liikkua kohti vastakkaista pohjoista / länttä, joka on lävistäjätilassa .... ja niin edelleen.
Plussat ja miinukset yllä selitetystä Simple Qaudcopter -kaukosäädinpiiristä.
Plussat
- Halpa ja helppo rakentaa myös suhteellisen uusi harrastaja.
- Ei vaadi monimutkaisia ohjaussauvan toimintoja.
- Voidaan ohjata yksikanavaisella 6-kanavaisella kaukosäätimellä
Haittoja
- Vähemmän tehokas akun varmuuskopiointi harjattujen moottoreiden vuoksi
- Suuntanopeus on vakio, eikä sitä voida muuttaa kaukosäätimen luurin kautta
- Ohjaus ei välttämättä ole sujuvaa, melko hieman nykivää vaihdettaessa painikkeita.
Edellinen: Voimaa tunnistava vastus selitetty Seuraava: Kapasitiivinen jännitteenjakaja