Viestissä kuvataan erilaisia menetelmiä tehokertoimen korjauspiirin tai PFC-piirin konfiguroimiseksi SMPS-malleissa ja selitetään näiden topologioiden parhaat käytännöt niin, että se noudattaa nykyaikaisia PFC-rajoitusohjeita.
Tehokkaiden virransyöttöpiirien suunnittelu ei ole koskaan ollut helppoa, mutta ajan mittaan tutkijat ovat pystyneet ratkaisemaan suurimman osan asiaan liittyvistä kysymyksistä, ja samalla tavoin myös nykyaikaiset SMPS-mallit optimoidaan parhailla mahdollisilla tuloksilla, kiitos nousevat sääntelystandardit, joilla oli tärkeä rooli tiukempien laatuparametrien toteuttamisessa nykyaikaisille virtalähteille.
PFC-ohjeet
Nykyaikaiset virtalähteen laaturajoitukset on asetettu melko aggressiivisesti valmistajien, toimittajien ja muiden asianomaisten hallintoelinten ponnisteluilla.
Nykyaikaisille virtalähdemalleille asetettujen monien laatuparametrien joukossa tehokertoimen korjauskorjaus (PFC), joka tosiasiallisesti tapahtuu harmonisen peruutuksen muodossa, on julistettu pakolliseksi vaatimukseksi IEC 61000-3-2 -säännöissä.
Tämän takia suunnittelijat joutuvat kohtaamaan kovempia haasteita suunniteltaessa tehokertoimen korjausvaiheita virtalähdesuunnittelussaan vastaamaan näitä tiukkoja nykyaikaisia lakeja, ja virtalähteiden ollessa yhä pelottavampia teknisten ominaisuuksiensa ja sovellusalueensa avulla, jäsentämällä asianmukaiset PFC-piirit ei tule helpommaksi areenan monille valmistajille.
Esitetyt oppaat on tarkoitettu erityisesti kaikille järjestöille ja ammattilaisille, jotka ovat mukana valmistuksessa tai flyback SMPS: n suunnittelu helpottamaan heitä ihanteellisimmilla PFC-suunnitelmilla ja laskelmilla heidän yksilöllisten vaatimustensa mukaisesti.
Näiden oppaiden sisältämät keskustelut auttavat sinua suunnittelemaan PFC-piirejä jopa huomattavan suurille yksiköille, jotka ovat jopa 400 wattia, 0,75 ampeeria.
Lukijat saavat myös mahdollisuuden oppia yksivaiheisten eristettyjen muuntimien valitsemisesta, joka sisältää myös LED-ohjaimet. Vaihe vaiheelta suunnitteluohjeet ja ohjeet sekä järjestelmätason vertailut, monet sähköelektroniikan alalla aktiivisesti mukana olevat suunnittelijat valaistaan parhaalla mahdollisella tavalla heidän erityisiin sovellustarpeisiinsa
Tehokertoimen korjaustavoite
Tehokertoimen korjauspiirin optimointi nykyaikaisissa SMPS (switch mode power supply) -yksiköissä voi kehittyä lähiaikoina useiden kehittyneiden asiaankuuluvien integroitujen piirien (IC) tulon vuoksi, mikä on mahdollistanut erilaisten PFC-mallien asettamisen, joilla on erityiset toimintatavat ja yksilölliset haasteiden käsittelyominaisuudet.
SMPS-topologioiden määrän lisääntyessä myös PFC-suunnittelun ja toteutuksen monimutkaisuus on lisääntynyt nykypäivänä.
Ensimmäisessä opetusohjelmassa opitaan suunnittelun operatiivisista yksityiskohdista, joita ammattilaiset suosivat enimmäkseen korjaukset.
Pohjimmiltaan tehokertoimen korjaus auttaa optimoimaan offline-virtalähteiden tulovirran siten, että ne pystyvät parantamaan todellista tehoa käytettävissä olevasta verkkotulosta.
Normaalin vaatimuksen mukaan tietyn sähkölaitteen on jäljiteltävä itseään kuormana, jolla on puhdas vastus, jotta se voi olla nolla loistehonkulutusta.
Tämä ehto johtaa melkein nollatulojen harmonisten virtojen muodostumiseen, toisin sanoen se sallii kulutetun virran olla täydellisesti linjassa vaiheessa tulojännitteen kanssa, joka normaalisti on siniaallon muodossa.
Tämä saavutus helpottaa laitetta kuluttamaan 'todellisen tehon' verkkovirrasta optimaalisimmalla ja tehokkaimmalla tasolla, mikä puolestaan vähentää sähkön tuhlausta ja lisää sen tehokkuutta.
Tämä tehokas sähkön käyttö ei ainoastaan auta laitetta esittelemään itseään tehokkaimmalla tavalla, vaan myös hyötyyhtiöiden ja prosessissa mukana olevien pääomalaitteiden kannalta.
Yllä oleva ominaisuus mahdollistaa lisäksi, että sähköjohdoissa ei ole yliaaltoja eikä siitä johtuvia häiriöitä verkon sisällä olevissa laitteissa.
Edellä mainittujen etujen lisäksi PFC: n sisällyttäminen moderneihin virtalähteisiin on myös Euroopassa ja Japanissa asetettujen vaatimusten noudattamista IEC61000-3-2 -standardin mukaisesti, jonka kaikkien sähkölaitteiden tulisi täyttää.
Edellä mainittua ehtoa on säännelty suurimmalle osalle elektroniikkalaitteita, joiden luokitus voi olla yli 75 wattia luokan D laitteistostandardien mukaan tai jotka ovat jopa korkeammat, mikä määrittelee linjan taajuuden yliaaltojen suurimman amplitudin, joka vaihtelee 39. harmoniseen.
Näiden standardien lisäksi PFC: tä käytetään myös muiden tehokkuuksien varmistamiseen, kuten tietokoneille välttämätön Energy Star 5.0 ja virtalähdejärjestelmiin ja televisioihin tarkoitettu Energy Star 2.0 vuodesta 2008 lähtien.
Määritelmä tehokerroin
PFC tai tehokertoimen korjaus voidaan määritellä todellisen tehon suhteena näennäistehoon ja ilmaista seuraavasti:
PF = Todellinen voima / näennäinen voima, jossa todellinen voima ilmaistaan
Wattia, kun näennäinen teho ilmaistaan VA: na.
Tässä lausekkeessa todellinen teho määritetään virran ja jännitteen hetkellisen tulon keskiarvona vaiheen tai jakson aikana, kun taas näennäisteho katsotaan virran RMS-arvoksi, joka kertoo jännitteen.
Tämä viittaa siihen, että aina kun virran ja jännitteen vastineet ovat sinimuotoisia ja vaiheittain toistensa kanssa, tuloksena oleva tehokerroin on 1,0.
Kuitenkin tilassa, jossa virta, jänniteparametrit ovat sinimuotoisia, mutta eivät vaiheessa, syntyy tehokerroin, joka on vaihekulman kosini.
Edellä kuvatut tehokerroinolosuhteet pätevät tapauksissa, joissa jännite ja virta ovat molemmat puhtaita siniaaltoja, yhdessä tilanteen kanssa, jossa mukana oleva kuormitus koostuu resistiivisistä, induktiivisista ja kapasitiivisista komponenteista, jotka voivat olla luonteeltaan kaikki epälineaarisia, ei säädä tulovirran ja jännitteen parametreilla.
SMPS-topologiat tuovat tyypillisesti epälineaarisen impedanssin verkkojohtoon johtuen edellä selitetystä piirien tyypistä.
Kuinka SMPS toimii
SMPS-piiri sisältää periaatteessa tasasuuntaajavaiheen tulossa, joka voi olla puoliaalto tai täysi-aallon tasasuuntaaja ja täydentävä suodatinkondensaattori tasasuuntaisen jännitteen pitämiseksi sen yli tulotehon siniaallon huipputasoon asti seuraavaan huippuun asti siniaalto ilmestyy ja toistaa tämän kondensaattorin lataussyklin, mikä johtaa vaadittuun vakiohuippujännitteeseen sen yli.
Tämä kondensaattorin latausprosessi kullakin vaihtovirran huippujaksolla edellyttää, että tulo on varustettava riittävällä virralla SMPS: n kuormituksen kulutuksen täyttämiseksi näiden huippuväleiden välillä.
Sykli toteutetaan syöttämällä nopeasti suuri virta kondensaattoriin, joka kohdistuu kuormaan purkautumalla, kunnes seuraava huippujakso saapuu.
Tälle epätasaiselle lataus- ja purkumallille on suositeltavaa, että kondensaattorin pulssivirta mitoitetaan 15% korkeammaksi kuin kuorman keskimääräinen vaatimus.

Edellä olevasta kuvasta voidaan nähdä, että huolimatta merkittävästä vääristymästä, jännite ja virtaparametrit ovat ilmeisesti vaiheessa toistensa kanssa.
Jos kuitenkin sovellamme termiä ”vaihekulman kosini” edellä olevaan kohtaan, se johtaisi virheelliseen johtopäätökseen siitä, että virtalähteen tehokerroin on 1,0
Ylempi ja alempi aaltomuoto osoittavat virran harmonisen sisällön määrän.
Tällöin 'perusharmoninen sisältö' ilmoitetaan verrattuna 100%: n amplitudiin, kun taas ylemmät yliaallot esitetään täydentävinä prosentteina perusamplitudista.
Koska todellinen teho määräytyy kuitenkin vain peruskomponentin avulla, kun taas muut täydentävät harmoniset yliaallot edustavat vain näennäistehoa, todellinen tehokerroin voi olla melko alle 1,0.
Kutsumme tätä poikkeamaa termillä vääristymätekijä, joka on pohjimmiltaan vastuussa ei-yhtenäisyyden tehokertoimen syntymisestä SMPS-yksiköissä.
Ilmaus todellisesta ja näennäisestä voimasta
Todellinen ja näennäisen voiman välinen yhteys voidaan ilmaista seuraavasti:

Missä cosΦ muodostaa siirtokertoimen, joka syntyy vaihekulmasta the virta / jännite-aaltomuotojen välillä, ja cosΦ tarkoittaa vääristymäkerrointa.

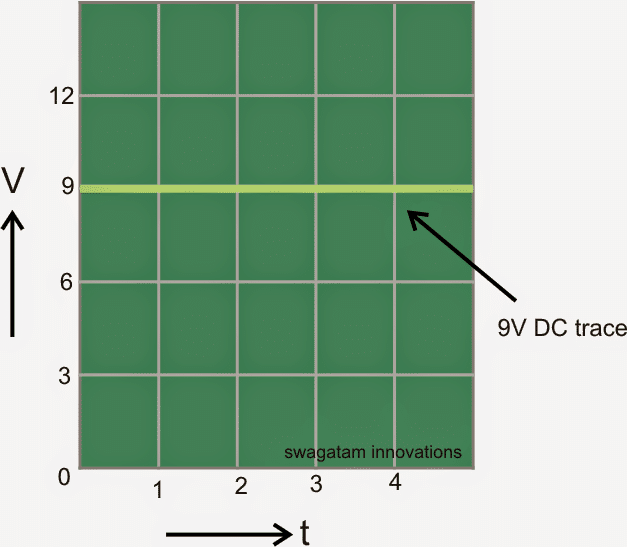
Viitaten alla olevaan kaavioon voimme todistaa tilanteen, joka osoittaa täydellisen tehokertoimen korjauksen.

Voimme nähdä, että tässä nykyinen aaltomuoto toistaa ihanteellisesti jännitteen aaltomuodon, koska molemmat näkyvät ilmeisesti vaiheittain ja synkronoituna toistensa kanssa.
Siksi tässä tulovirran harmonisten voidaan olettaa olevan melkein nolla.
Tehokertoimen korjaus vs. harmoninen alennus
Aikaisempia piirroksia tarkasteltaessa on selvää, että tehokerroin ja matalat yliaaltot toimivat synkronoituna toistensa kanssa.
Yleisesti katsotaan, että jos vastaavien harmonisten yliaaltojen raja-arvot hahmotellaan, se voi auttaa rajoittamaan syöttövirran epäpuhtauksia voimajohdoissa poistamalla häiritsevät virtahäiriöt lähellä olevien muiden laitteiden kanssa.
Siksi, vaikka tulovirran prosessointia voidaan kutsua 'tehokertoimen korjaukseksi', tarkennuksen ulostulon suuruus ajatteli, että tämä käsittely ymmärretään harmonisen sisällön mukaan kansainvälisten ohjeiden mukaisesti.
SMPS-topologioiden kohdalla se on yleensä siirtymäelementti, joka on suunnilleen yhtenäinen, mikä aiheuttaa seuraavat suhteet tehokertoimen ja harmonisen vääristymän välillä.

Lausekkeessa THD edustaa harmonista kokonaissäröä haitallisten harmonisten yliaaltojen neliösummana perustasoon nähden, ilmaisemalla liittyvän harmonisen sisällön suhteellisen painon suhteessa perusvastineeseen. Toinen yhtälö yhdistää THD: n absoluuttisen luvun ja ei prosenttiosuudessa, ilmaisemalla, että THD: n on oltava olennaisesti nolla yhtenäisyyden luomiseksi.
Tehokertoimen korjauksen tyypit
Yllä olevan kuvan sisääntulon aaltomuodon ominaisuus osoittaa tyypillisen 'aktiivisen' tyyppisen tehokertoimen korjauksen SMPS-laitteelle, joka on tuotu sisääntulotasasuuntaajan kokoonpanon ja suodatinkondensaattorin väliin ja prosessia ohjaavan integroidun PFC-piirin kautta siihen liittyvän piirin kanssa. varmistamalla, että tulovirta seuraa johdonmukaisesti tulojännitteen aaltomuotoa.
Tämän tyyppistä käsittelyä voidaan pitää yleisimpänä PFC-tyyppinä, jota käytetään nykyaikaisissa SMPS-piireissä, kuten alla olevasta kuvasta voidaan todeta.
Tämän sanottuaan ei ole missään tapauksessa pakollista, että ehdotettuun PFC: hen käytetään vain 'aktiivisia' versioita, jotka käyttävät IC: itä, ja puolijohteita. Myöskään muu muotoilu, joka voi taata kohtuullisen määrän PFC: tä asetettujen määräysten alapuolella, on yleensä tervetullutta.
On havaittu, että itse asiassa yksi induktori, joka korvaa 'aktiivisen' vastapuolen aseman, pystyy hylkäämään harmoniset harmoniset tyydyttävästi säätämällä piikkejä ja jakamalla virran tasaisesti synkronoituna tulojännitteen kanssa melko tehokkaasti.
Passiivinen PFC-suunnittelu
Tämä passiivisen PFC-ohjauksen muoto voi kuitenkin vaatia huomattavan tilaa vievää rautaytimistä induktoria, ja siksi sitä voidaan käyttää sovelluksiin, joissa tiivistys ei ole ratkaiseva vaatimus. (sivu 12)
Passiivinen yksi induktori saattaa tuntua olevan nopea ratkaisu PFC: lle, mutta suuren tehon sovelluksissa koko voi alkaa olla mielenkiintoinen, koska se on käytännössä suuri.
Alla olevasta kaaviosta voimme todistaa kolmen 250 watin PC SMPS -muunnelman lukujen tulo-ominaisuudet, joista kukin edustaa nykyistä aaltomuotoa vastaavalla asteikolla.
Voimme helposti nähdä, että passiivisesta induktoripohjaisesta PFC: stä saatu tulos on 33% korkeampi virtapiikki kuin aktiivisella PFC-suodattimella.
Vaikka tämä saattaisi pystyä läpäisemään IEC61000-3-2 -standardit, se ei todellakaan ole yhdenmukainen äskettäisen tiukemman 0.9PF-vaatimussäännön kanssa, ja se epäonnistuu uuden standardin mukaisesti asetetun laadunvalvontatason.
Peruslohkokaavio

Johtuen jatkuvasta sähköisestä markkinatrendistä, jossa voimme nähdä kuparikustannusten nousevan yhdessä magneettisydänprosessin nousun ja nykyaikaisten, paljon halvempien puolijohdemateriaalien käyttöönoton kanssa, ei ole yllätys, jos huomaamme aktiivisen PFC-lähestymistavan erittäin suosittu kuin passiivinen vastine.
Tämän trendin voidaan nähdä kasvavan entisestään tulevaisuudessa, esittäen yhä kehittyneempiä ja parannettuja PFC-ratkaisuja monille SMPS-suunnittelijoille ja -valmistajille.

Tulolinjan harmonisten yliaaltojen vertaaminen IEC610003-2-standardeihin
Alla olevassa kuvassa voimme nähdä jäljet kolmesta erillisestä 250 watin PC SMPS -tuloksesta viitaten IEC6000-3-2-rajoituksiin. Ilmoitettu rajoitus pätee kaikkiin D-luokan laitteisiin, kuten tietokoneisiin, televisioihin ja niiden näyttöihin.
Esitetty harmoninen sisältöraja on kiinteä laitteiden ottotehon mukaan. Valaisimiin liittyvissä tuotteissa noudatetaan yleensä LED-valoja, CFL-valoja, luokan C rajoituksia, jotka ovat identtisesti niiden ottotehorajojen kanssa.
Muiden ei-perinteisten elektroniikkatuotteiden PFC-raja on asetettu suhteessa vähintään 600 watin tulotehoon.
Jos katsomme passiivista PFC-jälkeä, havaitsemme sen olevan tuskin asetetun rajoitusrajan mukainen, vain kosketus ja mene eräänlainen tilanne (yliaallolla 3)

Analysoidaan passiivisia PFC-ominaisuuksia
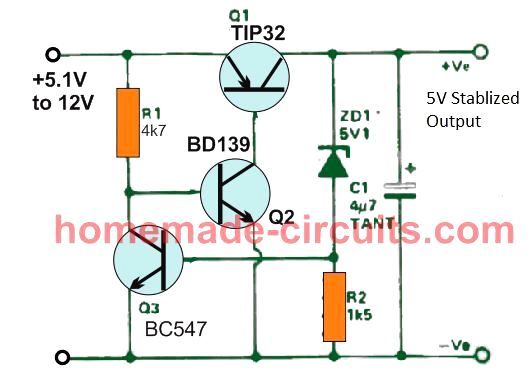
Seuraavassa kuvassa voimme nähdä klassisen esimerkin passiivisesta PFC-piiristä, joka on suunniteltu perinteiselle PC-virtalähteelle. Merkittävä asia tässä on PFC-induktorin keskihanan kytkentä tulojohdon tulojännitteeseen.
Vaikka 220 V: n valintatilassa (kytkin auki), kelan kahta osaa käytetään tasasuuntaajaverkon toimimalla kuin täyssillan tasasuuntaajapiiri.
110 V-tilassa (kytkin sulkeutuu) vain 50% tai puolet kelasta hyödynnetään toteutettavan kelan vasemmanpuoleisen osan kautta, kun taas tasasuuntaajaosa muutetaan nyt puoliaallon tasasuuntaajan kaksoispiiriksi.
Koska 220 V: n valinta on sitoutunut tuottamaan noin 330 V täyden aallon tasasuuntauksen jälkeen, tämä muodostaa SMPS-väylän tulon ja sillä on mahdollisuus vaihdella merkittävästi tulojohdon jännitteen mukaisesti.
Esimerkki piirikaaviosta

Vaikka tämä passiivinen PFC-muotoilu saattaa näyttää melko yksinkertaiselta ja vaikuttavalta suorituskyvyltään, sillä saattaa olla muutamia merkittäviä haittoja.
PFC: n kookkaan luonteen lisäksi kaksi muuta sen suorituskykyyn vaikuttavaa asiaa ovat ensinnäkin, mekaanisen kytkimen sisällyttäminen, joka tekee järjestelmästä alttiiksi mahdolliselle inhimilliselle virheelle yksikön käytössä, ja myös siihen liittyvät kulumisongelmat.
Toiseksi, kun linjajännitettä ei vakauteta, seurauksena on suhteellinen tehottomuus kustannustehokkuuden ja DC-DC-tehonmuunnoksen tarkkuudella, joka liittyy PFC-lähtöön.
Kriittisen johtamistilan (CrM) ohjaimet
Ohjaimen vaihe, jota kutsutaan kriittiseksi johtamistilaksi, jota kutsutaan myös siirtymämoodiksi tai BCM-ohjaimeksi, ovat piirikokoonpanoja, joita voidaan tehokkaasti käyttää valaistuselektroniikan sovelluksissa. Nämä ohjaimet ovat suhteellisen kalliita, vaikka niiden käyttö on vaivatonta.
Seuraava kaavio 1-8 kuvaa säännöllisen CrM-ohjainpiirin rakenteen.

Tyypillisesti CrM-ohjaimen PFC: llä on edellä esitetty eräänlainen piiri, joka voidaan ymmärtää seuraavien kohtien avulla:
Vertailukerroinasteen tulo vastaanottaa asianmukaisesti mitoitetun signaalin liittyvästä virhevahvistimen lähdöstä, jolla on matalataajuinen napa.
Kertojan toiseen tuloon voidaan viitata stabiloidulla DC-kiinnitetyllä jännitteellä, joka on erotettu tasasuuntaisesta vaihtovirtajohdon tulosta.
Kertojan tuloksena saatu lähtö on siis virhevahvistimen ulostulon suhteellisen DC: n ja AC-tulosta tulevan täyden aallon AC-sinipulssien muodossa saatu viite.
Tämä kertojavaiheen ulostulo voidaan nähdä myös täysiaaltoisten siniaaltoimpulssien muodossa, mutta pienennetään sopivasti suhteessa käytettyyn virhesignaaliin (vahvistuskerroin) tulojännitteen referenssinä.
Tämän lähteen signaalin amplitudi on sopivasti muutettu oikean määritetyn keskimääräisen tehon toteuttamiseksi ja asianmukaisen säädetyn lähtöjännitteen varmistamiseksi.
Virran amplitudin prosessoinnista vastaava vaihe saa virran virtaamaan kertojasta tulevan lähtöaaltomuodon mukaisesti, mutta linjataajuusvirran signaalin amplitudin (tasoituksen jälkeen) voidaan odottaa olevan puolet tästä kertojavaiheen referenssistä. .
Tässä virranmuodostuspiirien tehtävät voidaan ymmärtää seuraavasti:

Viitaten yllä olevaan kaavioon, Vref tarkoittaa kertojavaiheesta tulevaa signaalia, joka syötetään edelleen vertailijan toiseen opampiin, jonka toiseen tuloon viitataan nykyisen aaltomuodon signaalilla.
Virtakytkimessä induktorin yli kulkeva virta kasvaa hitaasti, kunnes shuntin yli kulkeva signaali on saavuttanut Vref-tason.
Tämä pakottaa vertailijan vaihtamaan lähdön PÄÄLLÄ-tilaan POIS-asentoon kytkemällä virran pois päältä piirille.
Heti kun näin tapahtuu, induktorin yli asteittain nouseva jännite alkaa pudota hitaasti kohti nollaa ja kun se koskettaa nollaa, opampin lähtö palaa ja kytkeytyy uudelleen päälle, ja sykli jatkuu.
Kuten yllä olevan ominaisuuden nimi tarkoittaa, järjestelmän ohjauskuvio ei koskaan salli induktorivirran ampua ennalta määrätyn rajan yli jatkuvan ja epäjatkuvan kytkentätilan välillä.
Tämä järjestely auttaa ennustamaan ja laskemaan opampin tuloksena olevan tuotoksen keskimääräisen huippuvirtatason välisen suhteen. Koska vaste on kolmion muotoisten aaltojen muodossa, aaltomuodon keskiarvo tarkoittaa tarkalleen 50% kolmion aaltomuotojen todellisista huipuista.
Tämä tarkoittaa, että kolmion aaltojen nykyisen signaalin tuloksena oleva keskiarvo olisi = induktorivirta x R-tunne tai yksinkertaisesti laittaa puolet opampin ennalta asetetusta vertailutasosta (Vref).
Edellä mainittua periaatetta käyttävien säätimien taajuus riippuu verkkojännitteestä ja kuormavirrasta. Taajuus voi olla paljon suurempi korkeammilla verkkojännitteillä ja se voi vaihdella linjatulon vaihdellessa.
Taajuuskiinnitteinen kriittinen johtamistila (FCCrM)
Huolimatta sen suosiosta erilaisissa teollisuuden virtalähteen PFC-ohjaussovelluksissa, yllä selitetyllä CrM-ohjaimella on joitain luontaisia haittoja.
Tämäntyyppisen aktiivisen PFC-ohjauksen suurin puute on taajuuden epävakaus linja- ja kuormitusolosuhteisiin nähden, mikä osoittaa taajuuden kasvua kevyemmillä kuormilla ja suuremmilla linjajännitteillä, ja samalla kun joka kerta kun tulo-siniaalto lähestyy nolla-risteyksiä.
Jos tätä ongelmaa yritetään korjata lisäämällä taajuuspuristin, tuloksena on vääristyneen virran aaltomuotoinen lähtö, mikä vaikuttaa väistämättömältä johtuen siitä, että ”Ton” pysyy säätämättömänä tälle menettelylle.

Vaihtoehtoisen tekniikan kehittäminen auttaa kuitenkin saavuttamaan todellisen tehokertoimen korjauksen jopa epäjatkuvassa tilassa (DCM). Toimintaperiaatetta voidaan tutkia alla olevassa kuvassa ja liitteenä olevilla yhtälöillä.

Viitaten yllä olevaan kaavioon, kelan huippuvirta voidaan arvioida ratkaisemalla:

Keskimääräinen kelavirta suhteessa kytkentäjaksoon (joka lisäksi oletetaan hetkelliseksi linjavirraksi tietylle kytkentäjaksolle, johtuen siitä, että kytkentätaajuus on yleensä korkeampi kuin linjataajuus, jolla verkkojännitteen vaihtelut tapahtuvat ) ilmaistaan kaavalla:

Yhdistämällä yllä oleva suhde ja yksinkertaistamalla termejä saadaan seuraava:

Yllä oleva ilmaus osoittaa selvästi ja viittaa siihen, että jos toteutetaan menetelmä, jossa algoritmi huolehtii ton.tcycle / Tsw: n pitämisestä vakiotasolla, se antaisi meille mahdollisuuden saavuttaa siniaaltojohtovirta, jolla on yhtenäisyystekijä jopa epäjatkuvassa toimintamalli.
Vaikka yllä olevat seikat paljastavat joitain selkeitä etuja ehdotetulle DCM-ohjaintekniikalle, se ei näytä olevan ihanteellinen valinta siihen liittyvän korkean huippuvirtatason takia, kuten seuraavassa taulukossa on osoitettu:

Ihanteellisten PFC-olosuhteiden saavuttamiseksi järkevä lähestymistapa olisi toteuttaa ehto, jossa DCM- ja Crm-toimintatavat yhdistetään parhaan lypsyn saamiseksi näistä kahdesta vastineesta.
Siksi kun kuormitusolosuhteet eivät ole kovat ja CrM käy suurella taajuudella, piiri menee DCM-toimintatilaan, ja jos kuormitusvirta on suuri, Crm-olosuhteiden annetaan jatkua niin, että virtapiikit eivät ei yleensä ylitä ei-toivottuja korkeita rajoja.
Tällainen optimointi kahdessa ehdotetussa ohjaustilassa voidaan parhaiten havainnollistaa seuraavassa kuvassa, jossa kahden ohjaustilan edut yhdistetään halutuimpien ratkaisujen saavuttamiseksi.

Jatkuu johtamistilaa
PFC: n jatkuva johtamistila voi tulla melko suosituksi SMPS-malleissa johtuen niiden joustavasta sovellusominaisuudesta ja -alueesta sekä siihen liittyvistä useista eduista.
Tässä tilassa nykyinen huippujännitys pidetään alhaisemmalla tasolla, mikä johtaa minimoitaviin kytkentähäviöihin kyseisissä komponenteissa, ja lisäksi tulon aaltoilu suoritetaan minimitasolla suhteellisen vakiona taajuudella, mikä puolestaan mahdollistaa tasoitusprosessin paljon yksinkertaisemmaksi sama.
Seuraavista CCM-tyyppiseen PFC: hen liittyvistä ominaisuuksista on keskusteltava hieman tarkemmin.
Vrms2-ohjaus
Yksi tärkeimmistä ominaisuuksista, jota käytetään useimmilla PFC-muotoiluilla yleisesti, on vertailusignaali, jonka on oltava alennettua jäljitelmää korjatusta tulovirrasta.
Tämä pienennetty tasasuuntainen tulojännitteen ekvivalentti käytetään lopulta piirissä oikean aaltomuodon muodostamiseksi lähtövirralle.
Kuten edellä on keskusteltu, tähän toimintaan käytetään tavallisesti kertojapiirivaihetta, mutta kuten tiedämme, että kertojapiirivaihe voisi olla suhteellisen vähemmän kustannustehokas kuin perinteinen twn-tuloinen kertojajärjestelmä.
Alla olevassa kuvassa nähdään klassinen esimerkkiasettelu, joka osoittaa jatkuvan moodin PFC-lähestymistavan.
Kuten voidaan nähdä, tehostinmuunnin laukaistaan tässä keskimääräisen virtatilan PWM: n avulla, josta tulee vastuussa induktorivirran (muuntimen tulovirta) mitoituksesta komentovirtasignaaliin V (i) viitaten. , joka voidaan nähdä supistettuna vastaavuutena tulojännitteestä V (in) osuuteen VDIV.
Tämä toteutetaan jakamalla virhejännitesignaali tulojännitesignaalin neliöön (tasoitettu kondensaattorilla Cf, jotta voidaan luoda yksinkertaistettu skaalauskerroin tulojännitetasoon nähden).

Vaikka sinulle saattaa tuntua hieman hankalalta nähdä virhesignaali jaettuna tulojännitteen neliöllä, syynä tähän toimenpiteeseen on luoda silmukan vahvistus (tai transientista riippuvainen vaste), joka ei välttämättä perustu tulojännitteeseen laukaiseva.
Jännitteen neliö nimittäjässä neutraloi Vsin-arvon ja PWM-ohjauksen siirtofunktion (induktorin nykyisen kuvaajan kaltevuuden suhteellisuus tulojännitteeseen).
Tämän PFC-muodon yksi haittapuoli on kuitenkin kertojan joustavuus, joka pakottaa tämän vaiheen hieman ylisuunnitelluksi, erityisesti piirin tehonkäsittelyosuudet, niin että se ylläpitää jopa pahimmassa tapauksessa vallitsevia skenaarioita.
Keskimääräinen virtatilan hallinta
Yllä olevasta kuvasta voimme nähdä, kuinka kertojasta V (i) tuotettu vertailusignaali merkitsee aaltomuodon muotoa ja PFC-tulovirran skaalausaluetta.
Osoitettu PWM-vaihe vastaa siitä, että keskimääräinen tulovirta on vertailuarvon tasolla. Menettely suoritetaan keskimääräisen virtatilan ohjaimen vaiheen kautta, kuten alla olevasta kuvasta näkyy.

Keskimääräinen virtatilan ohjaus on periaatteessa konfiguroitu säätämään keskimääräistä virtaa (tulo / lähtö) suhteessa ohjaussignaaliin Icp, joka puolestaan syntyy käyttämällä matalataajuista DC-silmukkaa virhevahvistinpiirin läpi, ja tämä ei ole muuta kuin tämän edellisessä kuvassa esitetty signaalia Vi vastaava virta.
Vaihevirtavahvistin toimii sekä virran integraattorina että virhevahvistimena aaltomuodon muodon säätämiseksi, kun taas Rcp: n yli syntyvä Icp-signaali tulee vastaamaan DC-tulojännitteen ohjauksesta.
Virtavahvistimen lineaarisen vasteen varmistamiseksi sen tulon on oltava samanlainen, mikä tarkoittaa, että R: n (shuntin) yli syntyvän potentiaalieron on oltava samanlainen kuin Rcp: n ympärillä syntyvä jännite, koska meillä ei voi olla tasavirtaa nykyisen vahvistimen ei-invertoiva vastustulo.
Nykyisen vahvistimen tuottaman lähdön oletetaan olevan 'matalataajuinen' virhesignaali riippuen shuntin keskimääräisestä virrasta sekä Isp: n signaalista.
Nyt oskillaattori tuottaa sahahammassignaalin, jota käytetään vertaamaan yllä olevaa signaalia siihen, aivan kuten jännitemoodin ohjaussuunnittelulla.
Tämä johtaa PWM: ien luomiseen, jotka määritetään vertaamalla edellä mainittuja kahta signaalia.
Edistyneet PFC-ratkaisut
Eri PFC-säätötavat, kuten edellä on käsitelty, (CrM, CCM, DCM) ja niiden muunnokset tarjoavat suunnittelijoille monipuolisia vaihtoehtoja PFC-piirien konfigurointiin.
Näistä vaihtoehdoista huolimatta johdonmukainen etsiminen parempien ja kehittyneempien moduulien saavuttamiseksi tehokkuuden suhteen on mahdollistanut kehittyneempien mallien diagnosoinnin näille sovelluksille.
Keskustelemme tästä lisää, koska tämä artikkeli päivitetään viimeisimmällä aiheesta.
Pari: Kuinka valita oikea laturi litiumioniakulle Seuraava: Solar E Rickshaw -piiri