Flyback-kokoonpano on suositeltava topologia SMPS-sovellussuunnitelmissa lähinnä siksi, että se takaa lähtöjännitteen täydellisen eristämisen tuloverkosta. Muita ominaisuuksia ovat alhaiset valmistuskustannukset, yksinkertaisempi suunnittelu ja mutkaton toteutus. Paluumuuntimien matalavirtaista DCM-versiota, joka sisältää alle 50 watin lähtöerittelyt, käytetään laajemmin kuin isompia suurivirtaisia vastaavia.
Opitaan yksityiskohdat kattavalla selityksellä seuraavien kappaleiden kautta:
Kattava suunnitteluopas offline-kiinteän taajuuden DCM Flyback Converterille
Flyback-toimintatilat: DCM ja CCM
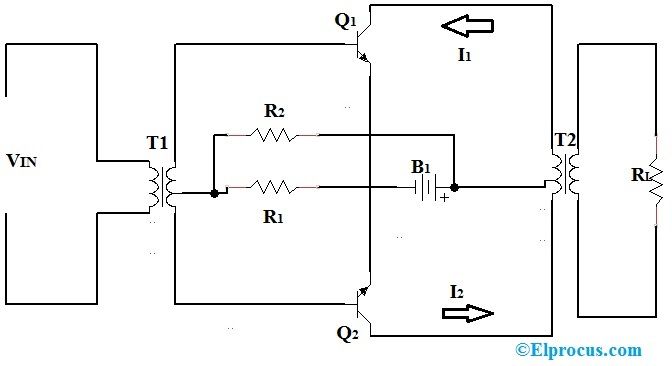
Alla on esitetty flyback-muuntimen peruskaavio. Tämän rakenteen pääosat ovat muuntaja, kytkentävoima mosfet Q1 ensiöpuolella, sillan tasasuuntaaja toissijaisella puolella D1, suodatinkondensaattori tasoitusta varten D1: n lähtö ja PWM-ohjain, joka voi olla IC-ohjattu piiri.

Tämän tyyppisessä takaisinkytkentärakenteessa voi olla CCM (jatkuva johtamistapa) tai DCM (keskeytymätön johtamistila) toiminto sen mukaan, miten teho MOSFET T1 on määritetty.
Pohjimmiltaan DCM-tilassa meillä on koko muuntajaan varastoitu sähköenergia siirretty toissijaisen puolen yli joka kerta, kun MOSFET kytketään pois päältä kytkentäjaksojensa aikana (kutsutaan myös flyback-jaksoksi), mikä johtaa siihen, että ensiöpuolen virta saavuttaa nollapotentiaalin ennen kuin T1 pystyy kytkeytymään uudelleen päälle seuraavalla kytkentäjaksollaan.
CCM-tilassa primääriin varastoitu sähköenergia ei saa mahdollisuutta siirtyä kokonaan tai indusoitua toissijaisen läpi.
Tämä johtuu siitä, että jokainen seuraavista kytkentäpulsseista PWM-ohjaimesta kytkeytyy päälle T1 ennen kuin muuntaja on siirtänyt koko varastoidun energiansa kuormaan. Tämä tarkoittaa, että paluuvirran (ILPK ja ISEC) ei koskaan anneta saavuttaa nollapotentiaalia kunkin kytkentäjakson aikana.
Voimme todistaa kahden toimintatilan eron seuraavassa kaaviossa nykyisten aaltomuotokuvioiden läpi muuntajan ensiö- ja toissijaisessa osassa.

Sekä DCM- että CCM-tiloilla on omat etunsa, jotka voidaan oppia seuraavasta taulukosta:

CCM: ään verrattuna DCM-moodipiiri vaatii suurempia huippuvirtoja optimaalisen tehon varmistamiseksi muuntajan toisiopuolella. Tämä puolestaan edellyttää, että ensisijainen puoli luokitellaan suuremmalla RMS-virralla, mikä tarkoittaa, että MOSFET on luokiteltava määritetylle korkeammalle alueelle.
Tapauksissa, joissa suunnittelun on oltava rakennettu rajallisella tulovirralla ja komponenteilla, valitaan yleensä CCM-tilan palautus, jolloin suunnittelussa voidaan käyttää suhteellisen pienempiä suodatinkondensaattoreita ja pienempi johtohäviö MOSFETissä ja muuntajassa).
CCM: stä tulee suotuisa olosuhteissa, joissa tulojännite on pienempi, kun taas virta on suurempi (yli 6 ampeeria), mallit, jotka voidaan luokitella toimimaan yli 50 watin teho , lukuun ottamatta 5 V: n lähtöjä, joissa tehon spesifikaatio voi olla alle 50 wattia.

Yllä oleva kuva osoittaa nykyisen vasteen paluumoodien ensisijaisella puolella ja vastaavan suhteen niiden kolmio- ja puolisuunnikkaan muotoisten aaltomuotojen välillä.
Kolmion muotoisen aaltomuodon IA osoittaa minimaalisen alustuspisteen, joka voidaan nähdä nollana MOSFET-laitteen kytkentäajanjakson alussa, ja myös korkeamman virran huipputason, joka on pysyvä muuntaja aikaan, kunnes MOSFET kytketään uudelleen päälle, CCM-toimintatilan aikana.
IB voidaan pitää nykyisen suuruuden lopetuspisteenä, kun taas mosfet kytkin on päällä (Ton-väli).
Normalisoitu virta-arvo IRMS voidaan nähdä K-tekijän (IA / IB) funktiona Y-akselin yli.
Tätä voidaan käyttää kertojana aina, kun resistiiviset häviöt on laskettava joukolle aaltomuotoja, lukuun ottamatta puolisuunnikkaan muotoista aaltomuotoa, jolla on tasainen ylempi aaltomuoto.
Tämä osoittaa myös muuntajan käämityksen ja transistorien tai diodien ylimääräiset väistämättömät DC-johtohäviöt virran aaltomuodon funktiona. Näitä neuvoja hyödyntämällä suunnittelija pystyy estämään jopa 10–15 prosentin johtohäviöt tällaisella hyvin lasketulla muunninsuunnittelulla.
Edellä mainittujen kriteerien huomioon ottaminen voi tulla merkittäväksi ratkaisuksi sovelluksille, jotka on suunniteltu käsittelemään suuria RMS-virtoja, ja vaativat optimaalista tehokkuutta tärkeimpinä ominaisuuksina.
Voi olla mahdollista eliminoida ylimääräiset kuparihäviöt, vaikka se saattaa vaatia pelottavaa ytimen koko välttämättömän isomman käämitysikkunan sijoittamiseksi, toisin kuin tilanteissa, joissa vain ydinspesifikaatioista tulee ratkaisevia.
Kuten olemme tähän mennessä ymmärtäneet, DCM: n toimintatila mahdollistaa pienemmän kokoisen muuntajan käytön, sillä on suurempi transienttivaste ja se toimii minimaalisilla kytkentähäviöillä.
Siksi tästä tilasta tulee erittäin suositeltava korkeammille lähtöjännitteille määritetyille takaisinkytkentäpiireille suhteellisen pienillä ampeereilla.
Vaikka voi olla mahdollista suunnitella flyback-muunnin toimimaan sekä DCM- että CCM-tilojen kanssa, on muistettava yksi asia, että siirtyessä DCM-tilasta CCM-tilaan tämä siirtofunktio muuttuu 2-napaiseksi toiminnaksi aiheuttaen matalan muuntimen impedanssi.
Tämän tilanteen vuoksi on välttämätöntä sisällyttää ylimääräisiä suunnittelustrategioita, mukaan lukien erilaiset silmukka- (takaisinkytkentä) ja kaltevuuskorjaukset suhteessa sisävirtajärjestelmään. Käytännössä tämä tarkoittaa, että meidän on varmistettava, että muunnin on suunniteltu ensisijaisesti CCM-tilaan, mutta pystyy kuitenkin toimimaan DCM-tilan kanssa, kun lähdössä käytetään kevyempiä kuormia.
Voi olla mielenkiintoista tietää, että käyttämällä edistyneitä muuntajan malleja voi olla mahdollista parantaa CCM-muunninta puhtaammalla ja kevyemmällä kuorman säätelyllä sekä korkealla ristisäätelyllä laajalla kuormitusalueella porrastetun muuntajan kautta.
Tällaisissa tapauksissa pieni ydinrako toteutetaan asettamalla ulkoinen elementti, kuten eristysnauha tai paperi, korkean induktanssin aikaansaamiseksi aluksi ja myös CCM-toiminnan mahdollistamiseksi kevyemmillä kuormilla. Keskustelemme tästä yksityiskohtaisesti joskus seuraavissa artikkeleissani.
Tällaisten monipuolisten DCM-tilan ominaisuuksien ansiosta ei ole mikään yllätys, että tästä tulee suosittu valinta aina, kun vaivaton, tehokas ja pienitehoinen SMPS on suunniteltava.
Seuraavassa opitaan vaiheittaiset ohjeet DCM-tilan flyback-muuntimen suunnittelusta.
DCM: n Flyback-suunnitteluyhtälöt ja peräkkäiset päätöksentekovaatimukset
Vaihe 1:
Arvioi suunnitteluvaatimuksesi. Kaikki SMPS-suunnittelu on aloitettava arvioimalla ja määrittämällä järjestelmän tekniset tiedot. Sinun on määritettävä ja määritettävä seuraavat parametrit:

Tiedämme, että tehokkuusparametri on ratkaiseva parametri, josta on päätettävä ensin. Helpoin tapa on edetä asettamalla tavoite noin 75-80%, vaikka suunnittelusi olisikin edullinen. Kytkentätaajuus on merkitty
Fsw on yleensä vaarantettava samalla, kun saat parhaan mahdollisen muuntajan koon ja vaihdon ja EMI: n aiheuttamat tappiot. Mikä tarkoittaa, että on ehkä päätettävä kytkentätaajuudesta, joka on vähintään alle 150 kHz. Tyypillisesti tämä voidaan valita välillä 50 kHz - 100 kHz.
Lisäksi, jos suunnittelussa vaaditaan useamman kuin yhden lähdön sisällyttämistä, suurin tehoarvo Pout on säädettävä kahden lähdön yhteisarvona.
Saatat olla mielenkiintoista tietää, että viime aikoihin asti suosituimmilla perinteisillä SMPS-malleilla oli mosfet ja PWM-kytkinohjain kahtena erillisenä vaiheena, integroituna yhteen piirilevyasettelun yli, mutta nykyään nykyaikaisissa SMPS-yksiköissä nämä kaksi vaihetta löytyvät upotettuna yhden paketin sisälle ja valmistettu yhtenä IC: nä.
Lähinnä parametrit, jotka yleensä otetaan huomioon suunnitellessa flyback SMPS -muunninta, ovat 1) sovellus tai kuormitustiedot, 2) kustannukset 3) valmiustila ja 4) lisäsuojaominaisuudet.
Kun käytetään upotettuja mikropiirejä, asioista tulee yleensä paljon helpompia, koska se vaatii vain muuntajan ja muutaman ulkoisen passiivisen komponentin laskemisen optimaalisen paluumuuntimen suunnittelemiseksi.
Mennään yksityiskohtiin, jotka koskevat laskutoimituksia, jotka koskevat uuden SMPS: n suunnittelua.
Sisääntulokondensaattorin säiliön ja syöttöjännitealueen laskeminen
Syöttöjännitteestä ja tehomäärityksistä riippuen Cin-valinnan vakiosääntö, johon viitataan myös DC-linkkikondensaattorina, voidaan oppia seuraavista selityksistä:

Laajan toiminta-alueen varmistamiseksi DC-linkkikondensaattorille voidaan valita 2uF wattia kohti tai suurempi arvo, mikä antaa sinulle mahdollisuuden saada hyvä laatualue tälle komponentille.
Seuraavaksi voidaan joutua määrittämään pienin tasavirtatulojännite, joka voidaan saada ratkaisemalla:

Jos purkautumisesta tulee DC-linkkikondensaattorin käyttösuhde, joka voi olla noin 0,2

Yllä olevassa kuvassa voimme visualisoida DC-linkkikondensaattorin jännitteen. Kuten on esitetty, tulojännite syntyy maksimilähtötehon ja pienimmän tulovirtajännitteen aikana, kun taas suurin DC-tulojännite syntyy vähimmäistulotehon (kuormituksen puuttuessa) ja maksimitulovirtajännitteen aikana.
Ei kuormitustilanteessa pystymme näkemään suurimman DC-tulojännitteen, jonka aikana kondensaattori latautuu vaihtovirran tulojännitteen huipputasolla, ja nämä arvot voidaan ilmaista seuraavalla yhtälöllä:

Vaihe 3:
Flybackin indusoiman jännitteen VR ja MOSFET VDS: n maksimijännitysjännityksen arviointi. Flybackin aiheuttama jännite VR voidaan ymmärtää jännitteeksi, joka indusoidaan muuntajan ensiöpuolella, kun mosfet Q1 on kytketty pois päältä.
Yllä oleva toiminto puolestaan vaikuttaa mosfetin suurimpaan VDS-luokitukseen, joka voidaan vahvistaa ja tunnistaa ratkaisemalla seuraava yhtälö:

Missä Vspike on jännitepiikki, joka syntyy muuntajan vuotoinduktanssista.
Aluksi voidaan ottaa 30% Vspike VDSmax: sta.
Seuraava luettelo kertoo meille, kuinka paljon heijastunutta jännitettä tai indusoitua jännitettä voidaan suositella 650 V: n ja 800 V: n mitoitetulle MOSFETille, ja jonka alkuperäinen raja-arvo VR on alle 100 V odotetulle suurelle tulojännitealueelle.

Oikean VR: n valitseminen voi olla kauppa toissijaisen tasasuuntaajan jännitetason ja ensiöpuolisen mosfet-spesifikaation välillä.
Jos VR valitaan erittäin korkeaksi suurennetun kääntösuhteen avulla, se johtaisi suurempaan VDSmax-arvoon, mutta pienempään jännitetasoon sekundäärisen sivudiodin kohdalla.
Ja jos VR valitaan liian pieneksi pienemmällä kääntösuhteella, VDSmax olisi pienempi, mutta lisäisi toissijaisen diodin jännitetasoa.
Suurempi ensiöpuolen VDSmax varmistaisi paitsi alhaisemman toisiopuolidiodin jännitetason ja vähentyneen ensiövirran, mutta mahdollistaisi myös kustannustehokkaan suunnittelun.
Paluumatka DCM-tilassa
Kuinka laskea Dmax riippuen heijastuneesta ja Vinministä
Suurimman käyttöjakson voidaan odottaa olevan VDCmin-esiintymissä. Tätä tilannetta varten voimme suunnitella muuntajan DCM: n ja CCM: n kynnyksiä pitkin. Tässä tapauksessa käyttöjakso voidaan esittää seuraavasti:

Vaihe 4:
Ensisijaisen induktanssivirran laskeminen
Tässä vaiheessa laskemme ensisijaisen induktanssin ja ensisijaisen huippuvirran.
Seuraavia kaavoja voidaan käyttää ensisijaisen huippuvirran tunnistamiseen:

Kun edellä mainittu on saavutettu, voimme mennä eteenpäin ja laskea ensiöinduktanssin seuraavalla kaavalla maksimikäyttöjaksojen rajoissa.

Palautumisessa on oltava varovainen, se ei saa mennä CCM-tilaan minkäänlaisten ylikuormitusolosuhteiden vuoksi, ja tämän maksimitehoerittelyn huomioon ottamiseksi on otettava huomioon laskettaessa Poutmax-yhtälöä # 5. Mainittu ehto voi ilmetä myös siinä tapauksessa, että induktanssi kasvaa Lprimax-arvon yli, joten ota ne huomioon.
Vaihe 5 :
Kuinka valita optimaalinen ydinlaatu ja koko:
Se voi näyttää melko pelottavalta, kun valitset oikean ydinspesifikaation ja rakenteen, jos suunnittelet paluumatkaa ensimmäistä kertaa. Koska tähän voi liittyä huomattava määrä huomioon otettavia tekijöitä ja muuttujia. Muutama näistä voi olla ratkaisevan tärkeää: ytimen geometria (esim. EE-ydin / RM-ydin / PQ-ydin jne.), Ytimen ulottuvuus (esim. EE19, RM8 PQ20 jne.) Ja ytimen materiaali (esim. 3C96. TP4, 3F3 jne).
Jos et tiedä miten edetä yllä oleviin teknisiin tietoihin, tehokas tapa torjua tämä ongelma voi olla a vakioydinvalintaopas ydinvalmistaja, tai voit myös käyttää apua seuraavaan taulukkoon, joka antaa karkeasti ytimen vakiomitat suunnitellessasi 65 kHz: n DCM-paluulähtöä lähtötehoon nähden.

Kun olet valinnut ytimen koon, on aika valita oikea puola, joka voidaan hankkia ydintiedotteen mukaan. Puolan lisäominaisuuksia, kuten nastojen lukumäärä, piirilevyn kiinnitys tai SMD, vaaka- tai pystysuuntainen sijoittelu, kaikkia näitä voidaan myös pitää mieluummin suositeltavana mallina
Ydinmateriaali on myös ratkaiseva, ja se on valittava taajuuden, magneettivuon tiheyden ja sydämen häviöiden perusteella.
Ensinnäkin voit kokeilla variantteja, joiden nimi on 3F3, 3C96 tai TP4A, muista, että käytettävissä olevan ydinmateriaalin nimet voivat olla erilaiset samanlaisille tyyppeille tietystä valmistuksesta riippuen.
Kuinka laskea minimikierrokset tai käämitys

Missä termi Bmax tarkoittaa toiminnan suurinta vuon tiheyttä, Lpri kertoo ensisijaisesta induktanssista, Ipri tulee ensisijaiseksi huippuvirraksi, kun taas Ae tunnistaa valitun ydintyypin poikkileikkauspinta-alan.
On muistettava, että Bmax-arvoa ei saa koskaan antaa ylittää kyllästysvirtauksen tiheyttä (Bsat), kuten ydinaineen datalehdessä on määritelty. Bsatissa voi olla pieniä eroja ferriittiytimissä riippuen spesifikaatioista, kuten materiaalityypistä ja lämpötilasta, mutta suurimmalla osalla niistä on arvo lähellä 400mT.
Jos et löydä yksityiskohtaisia viitetietoja, voit käyttää Bmaksimaalia 300 mT. Vaikka korkeamman Bmax-arvon valitseminen voi auttaa vähentämään ensiökiertojen määrää ja pienempää johtavuutta, ytimen menetys voi kasvaa merkittävästi. Yritä optimoida näiden parametrien arvojen välillä siten, että ydinhäviö ja kuparihäviö pidetään hyväksyttävissä rajoissa.
Vaihe 6:
Kuinka laskea pää sekundäärilähdön (Ns) ja muiden apulähtöjen (Naux) kierrosten määrä
Jotta määrittää toissijaiset käännökset ensin on löydettävä kääntösuhde (n), joka voidaan laskea seuraavalla kaavalla:

Missä Np on ensisijainen kierros ja Ns on toissijainen kierrosluku, Vout tarkoittaa lähtöjännitettä ja VD kertoo meille jännitteen pudotuksesta toissijaisen diodin yli.
Laskettaessa halutun Vcc-arvon apulähtöjen kierroksia voidaan käyttää seuraavaa kaavaa:

Apukäämityksestä tulee ratkaiseva kaikissa paluumuuntimissa ensimmäisen käynnistystoimituksen toimittamiseksi ohjauspiirille. Tätä syöttöjännitettä VCC käytetään yleensä kytkentäpiirin virtalähteeseen ensiöpuolella ja se voidaan korjata piirin tietolomakkeessa annetun arvon mukaan. Jos laskelma antaa ei-kokonaisluvun arvon, pyöristä se yksinkertaisesti käyttämällä ylempää kokonaislukuarvoa juuri tämän ei-kokonaisluvun yläpuolella.
Kuinka lasketaan langan koko valitulle lähtökäämitykselle
Useiden käämien johtokokojen oikean laskemiseksi meidän on ensin selvitettävä yksittäisen käämityksen RMS-virran määrittely.
Se voidaan tehdä seuraavilla kaavoilla:


Lähtökohtana virtatiheyttä 150 - 400 pyöreää mil / ampeeri, voitaisiin käyttää langan ulottuman määrittämiseen. Seuraavassa taulukossa on ohjeet sopivan lankamittarin valitsemiseksi 200 M / A: lla RMS-virran arvon mukaan. Se näyttää myös langan halkaisijan ja superemaloidun kuparilangan valikoiman mittarin peruseristyksen.

Vaihe 8:
Muuntajan rakenne ja käämitysmuoto iteraatio huomioon ottaen
Kun olet määrittänyt yllä mainitut muuntajan parametrit, on ratkaisevan tärkeää arvioida, miten langan mitat ja kierrosten määrä sovitetaan muuntajan laskettuun ytimen kokoon ja määritettyyn puolaan. Tämän oikean optimaalisen saavuttamiseksi voidaan tarvita useita iterointeja tai kokeita ydinspesifikaation optimoimiseksi viiran ulottuman ja kierrosten lukumäärän suhteen.
Seuraava kuva osoittaa tietyn kelausalueen EE-ydin . Lasketun langan paksuuden ja yksittäisen käämityksen kierrosten lukumäärän perusteella voi olla mahdollista arvioida likimääräisesti, soveltuuko käämitys käytettävissä olevaan käämitysalueeseen (w ja h) vai ei. Jos käämitys ei sovi, yksi kierrosluvun, langan mittarin tai ytimen koon parametreista tai useampi kuin yksi parametri saattaa edellyttää jonkin verran hienosäätöä, kunnes käämitys sopii optimaalisesti.

Käämityksen asettelu on ratkaisevan tärkeää, koska työn suorituskyky ja muuntajan luotettavuus riippuvat siitä merkittävästi. Käämitystä varten on suositeltavaa käyttää kerrosrakennetta tai rakennetta induktanssivuodon rajoittamiseksi, kuten kuvassa 5 on esitetty.
Myös kansainvälisten turvallisuusmääräysten täyttämiseksi ja noudattamiseksi suunnittelussa on oltava riittävä eristysalue käämin ensiö- ja toissijaisten kerrosten läpi. Tämä voidaan varmistaa käyttämällä reunakäämittyä rakennetta tai käyttämällä toissijaista johtoa, jolla on kolminkertainen eristetty johdinluokka, kuten seuraavassa kuvassa on esitetty

Kolmoiseristetyn langan käyttäminen toissijaiseen käämitykseen tulee helpommaksi vaihtoehdoksi vahvistaa nopeasti Flyback SMPS -malleja koskevat kansainväliset turvallisuuslait. Tällaisilla vahvistetuilla johdoilla voi kuitenkin olla hieman suurempi paksuus verrattuna normaaliin varianttiin, joka pakottaa käämityksen viemään enemmän tilaa, ja ne voivat vaatia lisäponnisteluja sijoittamiseksi valitun puolan sisään.
Vaihe 9
Ensisijaisen kiinnityspiirin suunnittelu
Kytkentäsekvenssissä mosfetin OFF-jaksojen aikana vuotoinduktanssin muodossa oleva suurjännitepiikki altistetaan mosfetin tyhjennyksen / lähteen poikki, mikä saattaa johtaa lumivyöryjen hajoamiseen, mikä lopulta vahingoittaa mosfetiä.
Tämän estämiseksi kiinnityspiiri konfiguroidaan yleensä ensiökäämin yli, mikä rajoittaa muodostetun piikin välittömästi johonkin turvalliseen pienempään arvoon.
Löydät pari kiinnityspiirirakennetta, jotka voidaan sisällyttää tähän tarkoitukseen seuraavan kuvan mukaisesti.

Nämä ovat nimittäin RCD-puristin ja Diodi / Zener-puristin, joissa jälkimmäinen on paljon helpompi konfiguroida ja toteuttaa kuin ensimmäinen vaihtoehto. Tässä puristinpiirissä käytämme tasasuuntausdiodin ja suurjännitteisen Zener-diodin, kuten TVS: n (transienttijännitteen vaimennin) yhdistelmää ylijännitepiikin kiinnittämiseen.
Toiminto Zener-diodi on kiinnittää tai rajoittaa jännitepiikki tehokkaasti, kunnes vuotojännite on täysin ohitettu Zener-diodin läpi. Diodi-Zener-kiinnittimen etu on, että piiri aktivoituu ja kiinnittyy vain, kun VR: n ja Vspiken yhdistetty arvo ylittää Zener-diodin hajoamisarvot, ja päinvastoin, kunhan piikki on Zenerin hajoamisen tai turvallisen tason alapuolella, pidike ei välttämättä laukea lainkaan, mikä ei salli tarpeetonta tehohäviötä.
Kuinka valita kiristysdiodi / Zener-luokitus
Sen tulisi aina olla kaksinkertainen heijastuneen jännitteen VR tai oletetun piikkijännitteen arvoon.
Tasasuuntaajan diodin tulisi olla erittäin nopea palautuminen tai schottky-tyyppinen diodi, jonka nimellisarvo on suurempi kuin DC-linkin maksimijännite.
Vaihtoehtoisella RCD-tyyppisen kiinnityksen haittana on MOSFETin dv / dt: n hidastaminen. Tässä vastuksen vastusparametrista tulee ratkaiseva, samalla kun se rajoittaa jännitepiikkiä. Jos valitaan pieniarvoinen Rclamp, se parantaa piikkisuojaa, mutta saattaa lisätä hajaantumista ja hukkaenergiaa. Päinvastoin, jos valitaan suurempi arvo Rclamp, se auttaisi minimoimaan hajaantumisen, mutta ei ehkä ole niin tehokasta piikkien tukahduttaminen .

Viitaten yllä olevaan kuvaan, jotta VR = Vspike voidaan varmistaa, seuraavaa kaavaa voidaan käyttää

Missä Lleak tarkoittaa muuntajan induktanssia ja se voidaan löytää tekemällä oikosulku toissijaisen käämityksen yli, tai vaihtoehtoisesti voitaisiin sisällyttää nyrkkisääntöarvo soveltamalla 2-4% ensisijaisesta induktanssiarvosta.
Tässä tapauksessa kondensaattorin Cclamp tulisi olla olennaisesti suuri estää jännitteen nousu vuotoenergian absorbointijakson aikana.
Cclampin arvo voidaan valita välillä 100pF - 4.7nF, tämän kondensaattorin sisälle varastoitu energia purkautuu ja päivittyy Rclampilla nopeasti eacj-kytkentäjakson aikana.
Vaihe 10
Kuinka valita tasasuuntausdiodi

Tämä voidaan laskea käyttämällä yllä esitettyä kaavaa.
Varmista, että valitset tekniset tiedot siten, että diodin suurin käänteinen jännite tai VRRM on vähintään 30% kuin VRVdiode, ja varmista myös, että IF: n tai lumivyöryn eteenpäin suuntautuvan virran spesifikaatio on vähintään 50% suurempi kuin IsecRMS. Käytä edullisesti schottky-diodia johtohäviöiden minimoimiseksi.
DCM-piirillä Flyback-huippuvirta voi olla korkea, joten yritä valita diodi, jolla on matalampi lähtöjännite ja suhteellisen korkeammat virtatiedot halutun hyötysuhteen suhteen.
Vaihe 11
Kuinka valita lähtökondensaattorin arvo
Valitse a oikein laskettu lähtökondensaattori Vaikka paluumatkan suunnittelu voi olla äärimmäisen tärkeää, koska takaisinkytkentätopologiassa varastoitunut induktiivinen energia ei ole käytettävissä diodin ja kondensaattorin välillä, mikä tarkoittaa, että kondensaattorin arvo on laskettava ottamalla huomioon kolme tärkeää kriteeriä:
1) Kapasitanssi
2) ESR
3) RMS-virta
Pienin mahdollinen arvo voidaan tunnistaa suurimman sallitun huippu-huippu-ulostulojännitteen toiminnasta riippuen, ja se voidaan tunnistaa seuraavan kaavan avulla:

Missä Ncp tarkoittaa ensisijaisten sivukellopulssien lukumäärää, jota ohjauksen takaisinkytkentä vaatii toiminnan ohjaamiseksi määritetyistä maksimi- ja minimiarvoista. Tämä voi tyypillisesti vaatia noin 10 - 20 kytkentäjaksoa.
Iout viittaa maksimilähtövirtaan (Iout = Poutmax / Vout).
Määritä lähtökondensaattorin suurin RMS-arvo seuraavalla kaavalla:

Määritetylle korkealle takaisinkytkentätaajuudelle muuntajan toisiopuolelta tuleva maksimihuippuvirta tuottaa vastaavasti korkean pulssijännitteen, joka kohdistetaan lähtökondensaattorin vastaavan ESR: n yli. Tämän vuoksi on varmistettava, että kondensaattorin ESRmax-nimellisarvo ei ylitä kondensaattorin määritettyä hyväksyttävää aaltoiluvirtakykyä.
Lopullinen suunnittelu voi periaatteessa sisältää halutun jänniteluokituksen ja kondensaattorin aaltoiluvirtakyvyn perustuen valitun lähtöjännitteen ja paluuvirran todelliseen suhteeseen.

Varmista, että ESR-arvo määritetään datalehdestä yli 1 kHz: n taajuuden perusteella, jonka voidaan olettaa olevan tyypillisesti välillä 10 kHz - 100 kHz.
Olisi mielenkiintoista huomata, että yksinäinen kondensaattori, jolla on pieni ESR-spesifikaatio, voi olla riittävä ohjaamaan ulostuloa. Voit yrittää sisällyttää pienen LC-suodattimen suuremmille huippuvirroille, varsinkin jos flyback on suunniteltu toimimaan DCM-tilan kanssa, mikä saattaa taata kohtuullisen hyvän aaltoilevan jännitteen ohjauksen lähdössä.
Vaihe 12
Muita tärkeitä huomioita:
A) Kuinka valita jännite ja virta nykyiselle tasasuuntaajalle.

Se voidaan tehdä yllä olevan yhtälön avulla.
Tässä kaavassa PF tarkoittaa tehokerrointa virtalähteestä, voimme käyttää 0,5, jos oikea viite tulee ulottumattomiin. Valitse siltasuuntaajalle diodit tai moduuli, jonka eteenpäin suuntautuvan vahvistimen luokitus on 2 kertaa suurempi kuin IACRMS. Jänniteluokitusta varten se voidaan valita 600 V: n jännitteellä enintään 400 V: n vaihtovirran tulomääritykseen.
B) Kuinka valita nykyinen aistivastus (Rsense):
Se voidaan laskea seuraavalla yhtälöllä. Anturivastus Rsense on integroitu tulkitsemaan maksimitehoa paluumatkan lähdössä. Vcsth-arvo voidaan määrittää viittaamalla ohjaimen IC-tietolomakkeeseen, Ip (max) tarkoittaa ensisijaista virtaa.

C) Kondensaattorin VCC: n valinta:
Optimaalinen kapasitanssin arvo on ratkaiseva tulokondensaattorille oikean käynnistysjakson aikaansaamiseksi. Yleensä mikä tahansa arvo välillä 22uF - 47uF tekee työn hienosti. Kuitenkin, jos tämä on valittu paljon pienemmäksi, se voi johtaa 'alijännitteen lukituksen' laukaisemiseen ohjaimen IC: ssä, ennen kuin muunnin pystyy kehittämään Vcc: n. Päinvastoin, suurempi kapasitanssiarvo voi johtaa ei-toivottuun viivästykseen muuntimen käynnistymisaikaan.
Varmista lisäksi, että tämä kondensaattori on parasta laatua, sillä on erittäin hyvät ESR- ja aaltoiluvirtamääritykset, yhtä kuin lähtö kondensaattorin tekniset tiedot . On erittäin suositeltavaa liittää toinen pienempi arvo kondensaattori luokkaa 100nF, rinnakkain yllä mainitun kondensaattorin kanssa ja mahdollisimman lähellä ohjaimen IC: n Vcc / maa-pinouteja.
D) Palautesilmukan määrittäminen:
Palaute silmukan kompensoinnista tulee tärkeäksi värähtelyn muodostumisen lopettamiseksi. Silmukka-kompensoinnin määrittäminen voi olla yksinkertaisempaa DCM-tilan paluumatkalla kuin CCM, johtuen 'oikean puolitason nollan' puuttumisesta tehovaiheessa, joten kompensointia ei vaadita.

Kuten yllä olevasta kuvasta käy ilmi, suoraviivaisesta RC: stä (Rcomp, Ccomp) tulee enimmäkseen juuri tarpeeksi ylläpitämään hyvää vakautta silmukan yli. Yleensä Rcomp-arvo voidaan valita mistä tahansa välillä 1K ja 20K, kun taas Ccomp voi olla välillä 100nF ja 470pF.
Tämä päättää monimutkaisen keskustelun siitä, kuinka suunnitella ja laskea paluumuunnin. Jos sinulla on ehdotuksia tai kysymyksiä, voit esittää ne seuraavaan kommenttikenttään, kysymyksiisi vastataan ASAP.
Kohteliaisuus: Infineon
Pari: Langaton ultraäänen vesitason ilmaisin - aurinkoenergialla toimiva Seuraava: PID-ohjaimen ymmärtäminen



![IC 4060: n lukitusongelma [ratkaistu]](https://electronics.jf-parede.pt/img/timer-delay-relay/35/ic-4060-latching-problem.jpg)