Tässä viestissä opitaan taaksepäin suuntautuva ajastinpiiri inkubaattorimoottorimekanismin käyttämiseksi suositelluilla liikkeillä. Idean pyysi Anwar
Tekniset tiedot
Olen Indonesiasta ..... Tarvitsen kaavioita hautomoajastimelle, jossa on suuri vääntömomentti (DC-moottorin sähköikkuna autossa). Yritän saada tasavirtamoottorin toimimaan kahteen suuntaan, kunnes se saavuttaa loppuasennon, sitten pysähtyy ja kytkee napaisuuden, jotta se kulkee toiseen suuntaan, kun tehoa käytetään uudelleen. Tee sitten sama asia toisessa päässä.
1. ajastin kytkee virran päälle 1 minuutiksi. (Klo 7.00–7.01)
2. moottori käy yhteen suuntaan, kunnes se osuu pysäytysasentoon, sanotaan 30 sekuntia.
3. moottorin virta sammuu, kun se osuu pysäytysasentoon ja viivästyy 1 minuutin ajan. ajastin päävirran katkaisemiseksi / sammuttamiseksi. kääntää myös napaisuuden niin, että.
4. seuraavan kerran, kun pääajastin käynnistyy (10: 00-10: 01), se annostelee samaa asiaa päinvastaisessa suunnassa ja toistaa jatkuvasti
5. 12 VDC moottori taaksepäin (vain kaksi kaapelia moottorista + ja -)
6. Tarvitaan Led-indikaattori kierros- / Fwd-moottorille
Voitteko auttaa minua, sir?
Kiitos etukäteen avusta.
Tämä on tärkeä kotiprojekti, jonka on oltava 100% luotettava.
Muotoilu

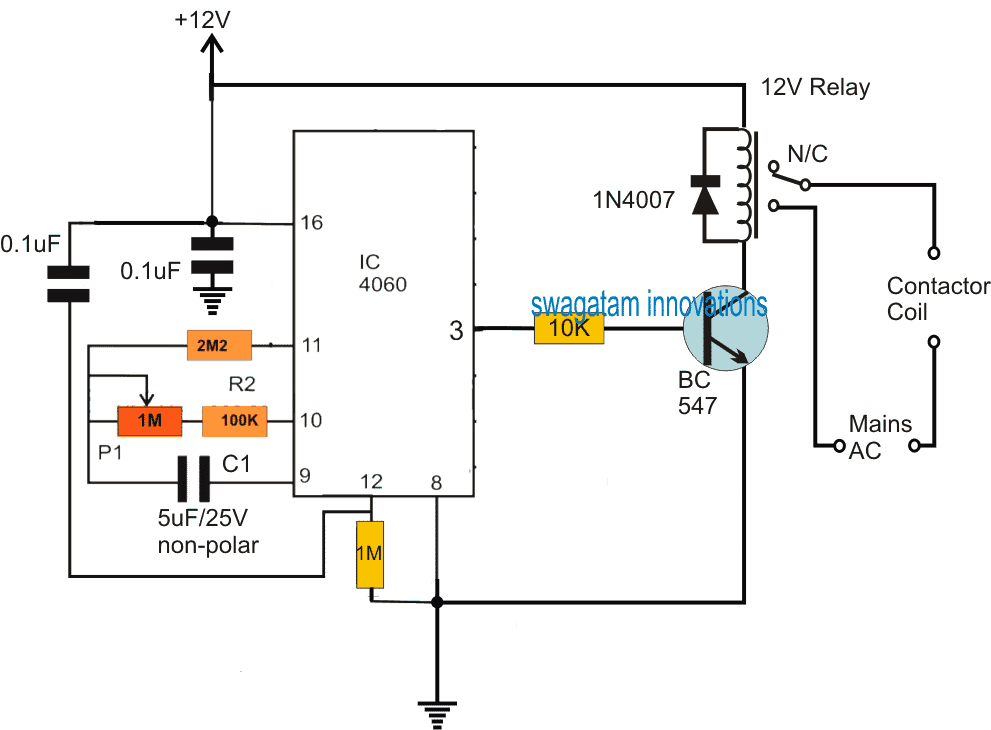
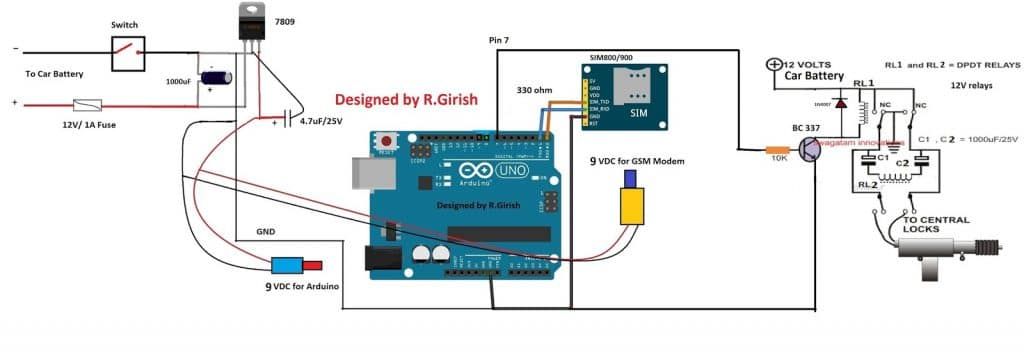
Yllä olevassa kuvassa voimme visualisoida suunnitelman inkubaattorimoottorin ehdotetun taaksepäin suuntautuvan liikkeen toteuttamiseksi ennalta määrätyn ajanjakson jälkeen.
Tällä hetkellä kun virta kytketään päälle, meillä on seuraava skenaario:
'Asetuksen' magneettikytkimen voidaan olettaa olevan deaktivoidussa tilassa tai painettuna, kun moottori tai suunniteltu inkubaattorimekanismi ovat nolla-käynnistysasennossa.
Huomaa, että 'set' / 'reset' -kytkimet tulisi mieluiten toteuttaa magneettisilla reed-kytkimillä.
Kun virta kytketään päälle, IC 4060 nollataan C2: n kautta siten, että se aloittaa laskentaprosessin nollasta, ja nastalle 3 tehdään nollalogiikka.
Tämä alkuperäinen nollalogiikka syötetään C3: n kautta T1: n pohjaan, joka välittömästi pakottaa T3: n ja siihen liittyvän releen aktivoitumaan. R7 prosessissa varmistaa, että T1 / T3 lukittuu tässä tilassa.
Tässä vaiheessa DPDT-rele toimii N / O-koskettimillaan ja käynnistää moottorin ja mekanismin kohti oletettua 'eteenpäin' -liikettä.
Heti kun moottori alkaa liikkua, asetuspainike vapautetaan siten, että T4 ja ylempi SPDT saavat mahdollisuuden käyttää, jolloin SPDT-rele saavuttaa N / O-asennonvaihdon, jolloin DPDT: n N / C-kontaktit ovat valmiustilassa. toimittaa..
Moottori ja / tai mekanismi liikkuvat, kunnes se on saavuttanut nollausasennon, joka saa T2: n aktivoimaan ja rikkomaan T1 / T4-salvan.
Kun T4 on kytketty pois päältä, DPDT-rele muuttaa asennon N / O: sta N / C: een ja tarjoaa vastakkaisen (taaksepäin) liikkeen moottorimekanismille.
Inkubaattorin moottorimekanismi kääntää nyt suunnan ja käynnistää peruutusliikkeen, kunnes se on saavuttanut asetuspisteen, joka kytkee nopeasti pois päältä T4: n perusaseman, SPDT kytkee pois päältä DPDT: n leikkaustehon ja koko mekanismi pysähtyy .
Sillä välin IC 4060 jatkaa laskemista, kunnes se on jälleen tuottanut nollalogiikan käydessään korkean logiikan pin3: lla (purkamalla C3).
Sykli käynnistyy jälleen ja toistaa menettelyn kuten yllä on selitetty.
Edellinen: LED-valon vilkkuminen Arduinolla - täydellinen opetusohjelma Seuraava: Suuritehoiset teollisuusverkkojännitesuojat tutkittu