Tässä viestissä aiomme oppia, mikä on servomoottori, miten se toimii, miten olla yhteydessä mikrokontrolleriin ja mikä tekee moottorista erityisen erikoisen muista moottoreista.
Elektroniikan harrastajana olisimme kohdanneet monenlaisia moottoreita, tässä aiomme tarkastella erityistä moottoria, jota kutsutaan servomoottoriksi.
Mikä on servomoottori?
Servomoottori tai yksinkertaisesti servo on erityinen moottorityyppi, joka on suunniteltu tarkkaan asennon, kiihtyvyyden ja nopeuden hallintaan. Toisin kuin kaikki muut moottorit, servo voi kiertää vain 180 astetta kaksisuuntaisesti. Siinä on mekaaniset hammaspyörät ja tulppa, jotka rajoittavat servon kulman pyörimistä.
Tyypillinen servomoottori:

Servomoottoreita käytetään robotiikassa, CCTV-kameroissa, RC-autoissa, veneissä, leluilma-aluksissa jne. Servoja käytetään siellä, missä meidän ei tarvitse jatkaa pyörivää liikettä, mutta lukitaan tiettyyn asentoon tai siirretään kuormaa hallitulla nopeudella liikkuvan kulmarajan sisällä.
Servo ei ole yksinkertaisesti moottori kuten muutkin tyypit, mutta se on moduuli, joka yhdistää normaalin DC / AC-moottorin, vaihderyhmän, ohjauselektroniikan ja takaisinkytkentäjärjestelmän. Katsotaanpa kutakin mainittua vaihetta yksityiskohtaisesti.
Servomoduulissa käytetty DC / AC-moottori voi olla harjaton tai harjattu moottori, useimmissa harrasteservoissa käytetään DC-moottoria ja vaihtovirtamoottoreita teollisissa sovelluksissa. Moottori antaa pyörimissyötön servolle. Moottori pyörii useita satoja kierrosta minuutissa servon sisällä ja lähtökierto on noin 50 kertaa tai enemmän kertaa vähemmän sen kierrosluvusta.
Seuraava vaihe on hammaspyöräkokoonpano, joka ohjaa servon kulman pyörimistä ja nopeutta. Vaihde voidaan valmistaa joko muovista tai metallista sen mukaan, kuinka suuri kuormitus on. Yleensä tasavirtamoottorit käyvät suurilla kierrosluvuilla ja matalalla vääntömomentilla vaihteisto muuntaa ylimääräisen kierrosluvun vääntömomentiksi. Pieni moottori kestää siten valtavan kuormituksen.
Seuraava vaihe on ohjauselektroniikka, joka muodostaa MOSFET: t ja IC: t moottorin pyörimisen ohjaamiseksi. Servomoottoreissa on aina palautejärjestelmä toimilaitteen nykyisen sijainnin seuraamiseksi.
Servoissa palautekomponentti on yleensä potentiometri, joka on kytketty suoraan pyörivään toimilaitteeseen. Potentiometri toimii jännitteenjakajana, joka syötetään ohjauselektroniikkaan. Tämä palaute auttaa ohjaamaan elektroniikkaa määrittämään moottorille annettavan tehon.
Kiinteässä asennossa oleva servomoottori liikkuu haluttomasti nykyisestä asemastaan, jos jokin ulkoinen voima yrittää häiritä. Takaisinkytkentäjärjestelmä valvoo senhetkistä sijaintia ja ohjaa moottoria ulkoisilta häiriöiltä.
Yllä oleva tilanne on sama, kun servo liikuttaa toimilaitetta. Ohjausjärjestelmä kompensoi ulkoisen voiman ja liikkuu määrätyllä nopeudella.
Tähän mennessä tiedät melko vähän servomoottorista ja sen toimintamekanismista. Katsotaanpa, miten servomoottoreita ohjataan mikro-ohjaimella.
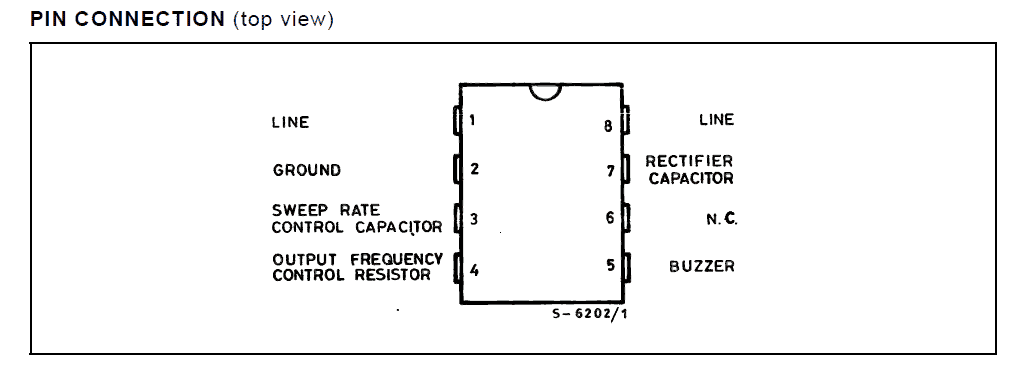
Servomoottoreissa on 3 liitintä, toisin kuin muissa moottoreissa, joissa on 2 liitintä, kaksi syöttöä varten (nimellinen 5 V) ja yksi ohjaussignaalia varten. Johdot ovat värillisiä liittimien helppoon tunnistamiseen.
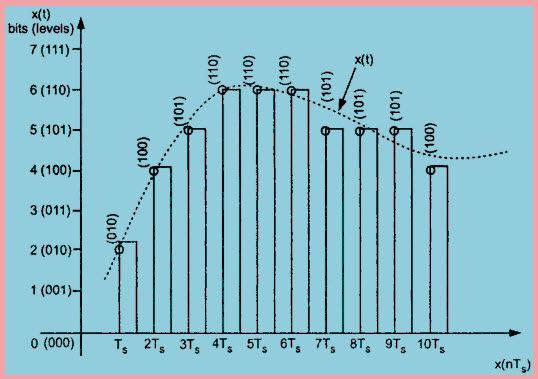
Servojen ohjaussignaalit ovat PWM 50 Hz: n taajuudella. Signaalin pulssinleveys määrää toimilaitteen varren sijainnin. Tyypillinen harrasteservomoottori toimii 1-2 millisekunnin pulssileveydellä.
1 ms pulssinleveyden ohjaussignaalin käyttäminen pitää toimilaitteen 0 asteen asennossa. 2 ms pulssinleveyden ohjaussignaalin käyttäminen pitää toimilaitteen 180 asteen asennossa. Signaalien käyttö 1-2 ms: n välillä pitää toimilaitteen 0-180 asteen kulmassa. Tämä voidaan ymmärtää paremmin alla olevan kuvan avulla.

Tähän mennessä olisit ymmärtänyt, kuinka servoa ohjataan pulssinleveyden moduloinnilla (PWM).
Oppitaan nyt servomoottorin liittäminen Arduinoon.
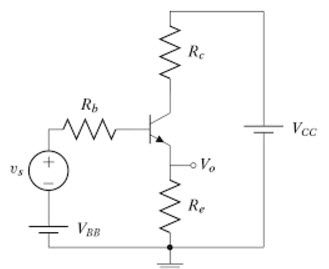
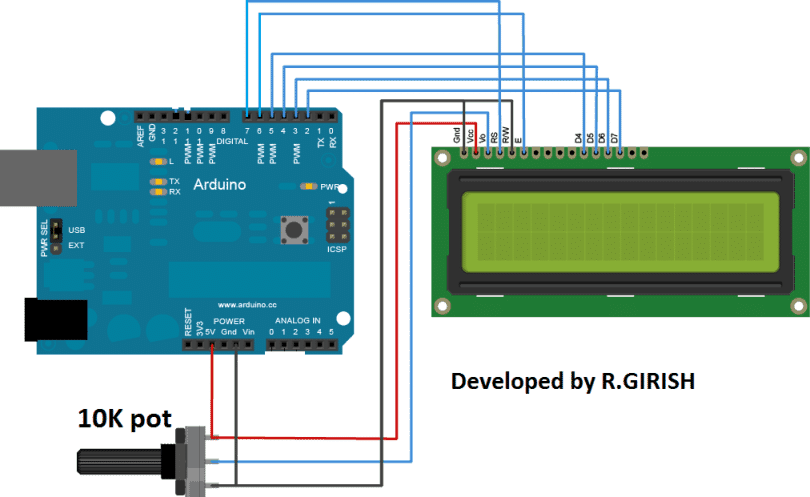
Piirikaavio:

Johdotus on helppoa ja itsestään selvää. Tarvitset ulkoisen virtalähteen, jos käytät isoa servomoottoria. Jos yrität virtaa arduino-virtalähteestä, ylikuormitat tietokoneen USB-portin.
Jos sinulla on samanlainen servo, joka on kuvattu artikkelin alussa, voit käyttää sitä arduino 5V -virtalähteestä, joka näkyy myös tekijän prototyypissä.
Kirjoittajan prototyyppi:

Arduino tarvitsee servokirjastoa sen käsittelyyn, se helpotti tehtäväämme ja on jo Arduino IDE: ssä.
Ohjelmoida:
//--------Program developed by R.Girish--------//
#include
Servo motor
int pos = 0
int t=10
void setup()
{
motor.attach(7)
}
void loop()
{
A:
pos=pos+1
motor.write(pos)
delay(t)
if(pos==180) { goto B}
goto A
B:
pos=pos-1
motor.write(pos)
delay(t)
if(pos==0) { goto A}
goto B
}
//--------Program developed by R.Girish--------//
Yllä oleva ohjelma pyyhkäisee toimilaitteen 0-180 astetta oikealle ja 180-0 astetta vasemmalle ja jaksot toistuvat. Tämä on yksinkertainen ohjelma servon testaamiseen, ja sinun on ehkä kirjoitettava oma koodi räätälöityjä sovelluksiasi varten.
Pari: Kahden putken vesipumpun venttiilin ohjainpiiri Seuraava: Moottoripyörän jännitesäätimen johdotuksen ymmärtäminen