Voimme tarkkailla erilaisia esineitä ympäri maailmaa. Vastaavasti tutkan kaltaista radion havaitsemista ja etäisyyden määrittämistä käytetään ohjaajien auttamiseen lennettäessä sumussa, koska ohjaaja ei voi huomata sitä, missä he matkustavat. Lentokoneissa käytetty tutka on samanlainen kuin taskulamppu, joka toimii radioaaltojen kanssa valon sijasta. Lentokone lähettää vilkkuvan tutkasignaalin ja kuuntelee mahdollisia signaaleja läheisistä kohteista. Kun merkinnät on havaittu, lentokone tunnistaa, että jokin on lähellä, ja se käyttää aikaa, joka viitteiden saavuttamiseen on havaittu, kuinka kaukana se on. Tässä artikkelissa käsitellään yleiskatsausta tutkasta ja sen toiminnasta.
Kuka keksi tutkan?
Kuten useissa keksinnöissä, tutkajärjestelmää ei ole helppo antaa luottoa yksilölle, koska se oli seurausta aikaisemmasta sähkömagneettinen säteily lukemattomien elektronisten laitteiden saatavuuden vuoksi. Suurinta huolta aiheuttavaa kysymystä monimutkaistaa sotilaallisen yksityisyyden piilopaikka, jonka mukaan radiopaikannustekniikoita tutkittiin eri maissa toisen maailmansodan alkuaikoina.
Tämä arvostelun kirjoittaja päätyi lopulta siihen, että kun tutkajärjestelmä on selkeä suoran luomisen tapaus, Robert Watson-Wattin huomautus Aircraft's Detection & Location of by Radio Methodsista julkaistiin välittömästi 50 vuotta sitten. Joten se oli merkittävin yksinäinen julkaisu tällä alalla. Britannian saavutukset Ison-Britannian taistelussa kohdensivat paljon tutkajärjestelmän laajentamiseen, joka sisälsi teknisen kasvun ja toimintakelpoisuuden.
Mikä on tutkajärjestelmä?
RADAR tarkoittaa Radiotunnistus ja vaihteleva järjestelmä. Se on periaatteessa sähkömagneettinen järjestelmä, jota käytetään havaitsemaan kohteen sijainti ja etäisyys RADAR-paikan sijainnista. Se toimii säteilemällä energiaa avaruuteen ja tarkkailemalla esineiden kaiku- tai heijastussignaalia. Se toimii UHF- ja mikroaaltojen alueella.
Tutka on sähkömagneettinen anturi, jota käytetään havaitsemaan, seuraamaan, paikallistamaan ja tunnistamaan erilaisia esineitä, jotka ovat tietyllä etäisyydellä. Tutka toimii siten, että se lähettää sähkömagneettista energiaa kohteiden suuntaan kaikujen havaitsemiseksi ja palaa niistä. Tässä kohteet ovat vain aluksia, lentokoneita, tähtitieteellisiä kappaleita, autoja, avaruusaluksia, sadetta, lintuja, hyönteisiä jne. Sen sijaan, että huomaisi kohteen sijainnin ja nopeuden, se saa toisinaan myös muodon ja koon.
Tutkan päätavoitteena infrapuna- ja optisiin antureihin verrattuna on löytää kaukaiset kohteet vaikeissa ilmasto-olosuhteissa ja määrittää niiden etäisyys, kantama tarkkuudella. Tutalla on oma lähetin, joka tunnetaan valonlähteenä kohteiden asettamiseen. Yleensä se toimii sähkömagneettisen spektrin mikroaaltouunilla, joka lasketaan hertseinä, kun taajuudet ulottuvat 400 MHz: stä 40 GHz: iin. Tutkassa käytettävät olennaiset komponentit
Tutka kehittyy nopeasti vuosina 1930 - 40 vastaamaan armeijan vaatimuksia. Sitä käytetään edelleen laajalti asevoimien kautta, aina kun useita teknisiä edistysaskeleita on syntynyt. Samanaikaisesti tutkaa hyödynnetään myös siviilisovelluksissa, erityisesti lentoliikenteen valvonnassa, sään havainnoinnissa, aluksen navigoinnissa, ympäristössä, etäisyydestä havaitsemiseen, planeettojen havaitsemiseen, nopeuden mittaamiseen teollisissa sovelluksissa, avaruusvalvonnassa, lainvalvonnassa jne.
Toimintaperiaate
tutkan toimintaperiaate on hyvin yksinkertainen, koska se välittää sähkömagneettista voimaa sekä tutkii takaisin kohteelle palatun energian. Jos palautetut signaalit vastaanotetaan jälleen niiden lähteen kohdalla, lähetystavalla on este. Tämä on tutkan toimintaperiaate.
Tutkan perusteet
RADAR-järjestelmä koostuu yleensä lähettimestä, joka tuottaa sähkömagneettisen signaalin, jonka antenni säteilee avaruuteen. Kun tämä signaali osuu esineeseen, se heijastuu tai toistetaan uudelleen moniin suuntiin. Tämä heijastunut tai kaikusignaali vastaanotetaan tutka-antennilla, joka toimittaa sen vastaanottimelle, jossa sitä käsitellään kohteen maantieteellisen tilaston määrittämiseksi.
Alue määritetään laskemalla aika, joka signaalilla kulkeutuu RADARista kohteeseen ja takaisin. Kohteen sijainti mitataan kulmassa, maksimiamplitudikaiutussignaalin suunnasta, antenni osoittaa. Doppler-tehostetta käytetään liikkuvien kohteiden alueen ja sijainnin mittaamiseen.
Tämän järjestelmän olennaiset osat sisältävät seuraavat.
- Lähetin: Se voi olla tehovahvistin, kuten Klystron, Traveling Wave Tube tai tehooskillaattori, kuten Magnetron. Signaali muodostetaan ensin aaltomuotogeneraattorilla ja vahvistetaan sitten tehovahvistimessa.
- Aaltojohdot: Aaltojohteet ovat siirtolinjoja RADAR-signaalien lähettämistä varten.
- Antenni: Käytettävä antenni voi olla parabolinen heijastin, tasomaiset ryhmät tai elektronisesti ohjatut vaiheistetut ryhmät.
- Kaksipuolinen tulostin: Kaksipuolisen tulostimen avulla antennia voidaan käyttää lähettimenä tai vastaanottimena. Se voi olla kaasumainen laite, joka aiheuttaisi oikosulun vastaanottimen tulossa, kun lähetin toimii.
- Vastaanotin: Se voi olla superheterodyne-vastaanotin tai mikä tahansa muu vastaanotin, joka koostuu prosessorista signaalin käsittelemiseksi ja havaitsemiseksi.
- Kynnyspäätös: Vastaanottimen lähtöä verrataan kynnykseen minkä tahansa kohteen läsnäolon havaitsemiseksi. Jos lähtö on jonkin kynnyksen alapuolella, oletetaan, että melua esiintyy.
Kuinka tutka käyttää radiota?
Kun tutka on asetettu alukselle tai lentokoneelle, se vaatii samanlaisen välttämättömän komponenttisarjan radiosignaalien tuottamiseksi, lähettämiseksi avaruuteen ja vastaanottamiseksi jollakin, ja lopuksi tietojen näyttämiseksi sen ymmärtämiseksi. Magnetroni on eräänlainen laite, jota käytetään radion kautta käytettävien radiosignaalien tuottamiseen. Nämä signaalit ovat samanlaisia kuin valosignaalit, koska ne kulkevat samalla nopeudella, mutta niiden signaalit ovat paljon pidempiä ja vähemmän taajuuksia.
Valosignaalien aallonpituus on 500 nanometriä, kun taas tutkan käyttämät radiosignaalit vaihtelevat yleensä senttimetreistä metreihin. Sähkömagneettisessa spektrissä sekä signaalit, kuten radio että valo, tehdään vaihtelevalla magneetti- ja sähköenergian mallilla koko ilmassa. Tutkan magnetroni tuottaa samanlaisia mikroaaltoja kuin mikroaaltouuni. Suurin ero on se, että tutkan sisällä olevan magnetronin on lähetettävä signaaleja useita mailia pikemminkin kuin vain pienet etäisyydet, joten se on tehokkaampi ja paljon suurempi.
Aina kun radiosignaalit on lähetetty, antenni toimii lähettimenä lähettääkseen ne ilmaan. Yleensä antennin muoto on taivutettu, joten se keskittää signaalit lähinnä tarkkaan ja kapeaan signaaliin, mutta tutka-antennit myös normaalisti pyörivät, jotta he voivat havaita toimia valtavalla alueella.
Radiosignaalit kulkevat antennin ulkopuolelta 300 000 km / s nopeudella, kunnes ne lyövät jotain ja jotkut heistä palaavat takaisin antenniin. Tutkajärjestelmässä on olennainen laite, nimittäin dupleksi. Tätä laitetta käytetään antennin vaihtamiseen puolelta toiselle lähettimen ja vastaanottimen välillä.
Tutkatyypit
Tutkoja on erityyppisiä, jotka sisältävät seuraavat.
Bistaattinen tutka
Tämän tyyppinen tutkajärjestelmä sisältää Tx-lähettimen ja Rx-vastaanottimen, joka on jaettu etäisyydellä, joka vastaa arvioidun kohteen etäisyyttä. Lähettäjä ja vastaanotin sijaitsevat samankaltaisessa paikassa, jota kutsutaan luostaritutkaksi, kun taas hyvin pitkän kantaman pinta ilmaan ja ilmaan ilmaan -sotilaallisessa laitteistossa käytetään bistaattista tutkaa.
Doppler-tutka
Se on erityyppinen tutka, joka käyttää Doppler-tehostetta datanopeuden luomiseen kohteelle tietyllä etäisyydellä. Tämä voidaan saada lähettämällä sähkömagneettisia signaaleja kohteen suuntaan niin, että se analysoi, kuinka kohteen toiminta on vaikuttanut palautetun signaalin taajuuteen.
Tämä muutos antaa erittäin tarkat mittaukset kohteen nopeuden radiaalikomponentille suhteessa tutkaan. Näiden tutkien sovelluksiin liittyy eri teollisuudenaloja, kuten meteorologia, ilmailu, terveydenhuolto jne.
Monopulssitutka
Tämäntyyppinen tutkajärjestelmä vertaa saatuja signaaleja käyttämällä erityistä tutkapulssia sen vieressä vertaamalla signaalia, joka on havaittu lukuisissa polarisaatioissa. Yleisin monopulssitutka on kartiomainen pyyhkäisytutka. Tällainen tutka arvioi paluuta kahdella tapaa mitata kohteen sijainti suoraan. On merkittävää huomata, että vuonna 1960 kehitetyt tutkat ovat monopulssitutkaa.
Passiivinen tutka
Tämäntyyppinen tutka on suunniteltu pääasiassa havaitsemaan ja seuraamaan tavoitteita käsittelemällä ympäristön valaistuksen osoittimia. Nämä lähteet käsittävät viestintäsignaaleja sekä kaupallisia lähetyksiä. Tämän tutkan luokittelu voidaan tehdä samaan bistaattisen tutkan luokkaan.
Instrumentointitutka
Nämä tutkat on suunniteltu lentokoneiden, ohjusten, rakettien jne. Testaamiseen. Ne antavat erilaisia tietoja, kuten tilaa, sijaintia ja aikaa sekä jälkikäsittelyn että reaaliaikaisen analyysin yhteydessä.
Säätutkat
Näitä käytetään suunnan ja sään havaitsemiseen käyttämällä radiosignaaleja pyöreän tai vaakasuoran polarisaation kautta. Säätutkan taajuuden valinta riippuu pääasiassa vaimennuksen suorituskyvyn kompromissista sekä ilmakehän höyryn seurauksena tapahtuvasta sateen korjauksesta. Jotkut tutkatyypit on suunniteltu pääasiassa käyttämään Doppler-siirtymiä tuulen nopeuden laskemiseksi sekä kaksoispolarisaatiota sademäärien tunnistamiseksi.
Tutkan kartoitus
Näitä tutkia käytetään pääasiassa suuren maantieteellisen alueen tutkimiseen etäseurannan ja maantieteen sovelluksia varten. Synteettisen aukon tutkan seurauksena nämä rajoitetaan melko kiinteisiin kohteisiin. On olemassa joitain erityisiä tutkajärjestelmiä, joita käytetään ihmisten havaitsemiseen seinien jälkeen, jotka ovat erilaisempia kuin rakennusmateriaaleissa.
Navigointitutkat
Yleensä nämä ovat samat tutkatutkimille, mutta niitä on saatavana pienillä aallonpituuksilla, jotka pystyvät replikoitumaan maasta ja kivistä. Näitä käytetään yleisesti kaupallisilla aluksilla sekä kaukolentokoneilla. On olemassa erilaisia suunnistustutkoja, kuten meritutkat, jotka sijoitetaan yleisesti aluksille törmäyksen välttämiseksi sekä navigointitarkoituksiin.
Pulssi RADAR
Pulssi RADAR lähettää suuritehoisia ja korkeataajuisia pulsseja kohti kohdeobjektia. Sitten se odottaa kaikusignaalia kohteesta, ennen kuin uusi pulssi lähetetään. RADARin alue ja resoluutio riippuvat pulssin toistotaajuudesta. Se käyttää Doppler-siirtomenetelmää.
Periaate, jonka mukaan RADAR tunnistaa liikkuvat kohteet Doppler-siirtymällä, toimii sillä, että paikallaan olevien esineiden kaikusignaalit ovat samassa vaiheessa ja siten ne peruutetaan, kun taas liikkuvien kohteiden kaikusignaaleilla on joitain muutoksia vaiheessa. Nämä tutkat luokitellaan kahteen tyyppiin.
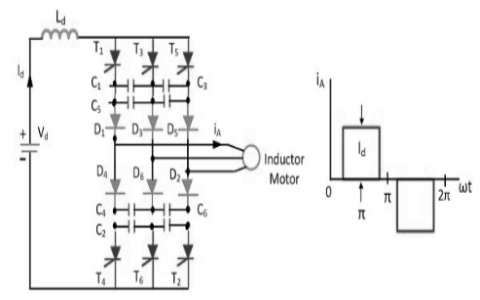
Pulssi-Doppler
Se lähettää suuren pulssin toistotaajuuden Doppler-epäselvyyksien välttämiseksi. Lähetetty signaali ja vastaanotettu kaikusignaali sekoitetaan ilmaisimessa Doppler-siirtymän saamiseksi ja erosignaali suodatetaan käyttämällä Doppler-suodatinta, jossa ei-toivotut kohinasignaalit hylätään.

Pulssidoppler RADAR -diagrammi
Liikkuvan kohteen ilmaisin
Se lähettää matalan pulssin toistotaajuuden alueen epäselvyyksien välttämiseksi. MTI RADAR -järjestelmässä kohteen vastaanotetut kaikusignaalit ohjataan kohti sekoitinta, jossa ne sekoitetaan stabiilin paikallisoskillaattorin (STALO) signaaliin IF-signaalin tuottamiseksi.
Tämä IF-signaali vahvistetaan ja annetaan sitten vaiheenilmaisimelle, jossa sen vaihetta verrataan koherenttioskillaattorin (COHO) signaalin vaiheeseen ja tuotetaan erosignaali. Koherenttisignaalilla on sama vaihe kuin lähettimen signaalilla. Koherentti signaali ja STALO-signaali sekoitetaan ja annetaan tehovahvistimeen, joka kytketään päälle ja pois päältä pulssimodulaattorilla.

MTI-tutka
Jatkuva aalto
Jatkuva aalto RADAR ei mittaa kohteen aluetta vaan pikemminkin alueen muutosnopeutta mittaamalla paluusignaalin Doppler-siirtymä. CW RADAR -laitteessa sähkömagneettista säteilyä syntyy pulssien sijaan. Sitä käytetään periaatteessa nopeuden mittaus .
RF-signaali ja IF-signaali sekoitetaan sekoitusvaiheessa paikallisen oskillaattorin taajuuden muodostamiseksi. RF-signaali lähetetään sitten signaaliksi ja RADAR-antennin vastaanottama signaali koostuu RF-taajuudesta plus Doppler-siirtotaajuudesta. Vastaanotettu signaali sekoitetaan paikallisen oskillaattorin taajuuteen toisessa seosvaiheessa IF-taajuussignaalin muodostamiseksi.
Tämä signaali vahvistetaan ja annetaan kolmannelle seosvaiheelle, jossa se sekoitetaan IF-signaalin kanssa signaalin saamiseksi Doppler-taajuudella. Tämä Doppler-taajuus tai Doppler-muutos antaa kohteen alueen muutosnopeuden ja siten kohteen nopeuden mitataan.

Lohkokaavio, jossa näkyy CW RADAR
Tutka-alueen yhtälö
Tutka-alueen yhtälöihin on saatavana erilaisia versioita. Tässä seuraava yhtälö on yksi ainoan antennijärjestelmän perustyypeistä. Kun kohteen oletetaan olevan keskellä antennisignaalia, korkein tutkan ilmaisualue voidaan kirjoittaa muodossa
Rmax = 4√Pt λ2G2σ / (4π) 3Pmin
= 4√Pt C2G2σ / fo2 (4π) 3Pmin
‘Pt’ = Lähetysteho
’Pmin’ = Minimi havaittava signaali
’Λ’ = Lähettää aallonpituutta
’Σ’ = kohdetutkan poikkileikkaus
’Fo’ = Taajuus Hz: ssä
’G’ = antennin vahvistus
’C’ = Valon nopeus
Yllä olevassa yhtälössä muuttujat ovat vakaita ja tukeutuvat tutkaan kohteen lisäksi, kuten RCS. Lähetystehon järjestys on 1 mW (0 dBm) ja antennin vahvistus noin 100 (20 dB), kun ERP (tehokas säteilyteho) on 20 dBm (100 mW). Vähiten havaittavien signaalien järjestys on pikowatti ja ajoneuvon RCS voi olla 100 neliömetriä.
Tutkan kantamayhtälön tarkkuus on siis tulodata. Pmin (pienin havaittavissa oleva signaali) riippuu pääasiassa vastaanottimen kaistanleveydestä (B), F (kohinaluku), T (lämpötila) ja tarvittavasta S / N-suhteesta (signaali-kohinasuhde).
Kapea kaistanleveys vastaanotin on herkempi kuin leveään mustavalkovastaanottimeen. Meluluku voidaan määritellä, koska se on laskenta siitä, kuinka paljon kohinaa vastaanotin voi vaikuttaa kohti signaalia. Kun meluluku on pienempi, melua on vähemmän, mitä laite lahjoittaa. Kun lämpötila nousee, se vaikuttaa vastaanottimen herkkyyteen nousevan tulomelun kautta.
Pmin = kTBF (S / N) min
Edellä olevasta yhtälöstä
”Pmin” on vähiten havaittavissa oleva signaali
’K’ on Boltzmannin vakio, kuten 1,38 x 10–23 (watti * sek / ° Kelvin)
’T’ on lämpötila (° Kelvin)
’B’ on vastaanottimen kaistanleveys (Hz)
’F’ on meluluku (dB), melutekijä (suhde)
(S / N) min = vähiten S / N-suhde
Käytettävissä oleva i / p-lämpökohinan teho voi olla verrannollinen kTB: hen, missä 'k' on Boltzmannin vakio, 'T' on lämpötila ja 'B' on vastaanottimen kohinan kaistanleveys hertseinä.
T = 62,33 ° F tai 290 ° K
B = 1 Hz
kTB = -174 dBm / Hz
Yllä oleva tutka-alueyhtälö voidaan kirjoittaa vastaanotetulle teholle, kuten toiminta-alue tarjotulle lähetysteholle, antennivahvistukselle, RCS: lle ja aallonpituudelle.
Prec = Pt λ2G2σ / (4π) 3R4max = Pt C2G2σ / (4π) 3R4fo2
Prec = PtG2 (λ / 4π) 2 σ / 4πR2
Edellä olevasta yhtälöstä
”Prec” on vastaanotettu teho
”Pt” on lähetysteho
’Fo’ on lähetystaajuus
’Λ’ on lähetysaallonpituus
’G’ on antennin vahvistus
’Σ’ on tutkan poikkileikkaus
’R’ on alue
”C” on valon nopeus
Sovellukset
tutkan sovellukset Sisällytä seuraavat.
Sotilaalliset sovellukset
Sillä on 3 suurta sovellusta armeijassa:
- Ilmapuolustuksessa sitä käytetään kohteen havaitsemiseen, kohteen tunnistamiseen ja aseen hallintaan (ohjaamalla ase jäljitettyihin kohteisiin).
- Ohjusjärjestelmässä aseen ohjaamiseksi.
- Vihollisen sijaintien tunnistaminen kartalla.
Lennonjohto
Sillä on 3 suurta sovellusta lennonjohdossa:
- Lentoliikenteen hallitsemiseksi lentokenttien lähellä. Ilmanvalvontaradaria käytetään ilmaisemaan ja näyttämään lentokoneen sijainti lentokentän terminaaleissa.
- Ohjata lentokone laskeutumaan huonolla säällä käyttämällä Precision Approach RADAR -laitetta.
- Skannaa lentoaseman pinta ilma-alusten ja maa-ajoneuvojen sijaintien suhteen
Etätunnistus
Sitä voidaan käyttää tarkkailemaan planeettojen sijaintia vai tarkkailemaan ja merijäätä sujuvan reitin takaamiseksi aluksille.
Maaliikenteen hallinta
Liikennepoliisi voi käyttää sitä myös ajoneuvon nopeuden määrittämiseen ja ajoneuvojen liikkeen hallintaan antamalla varoituksia muiden ajoneuvojen läsnäolosta tai muista niiden takana olevista esteistä.
Avaruus
Sillä on 3 suurta sovellusta
- Ohjata avaruusalusta turvalliseen laskeutumiseen Kuuhun
- Tarkkailla planeettajärjestelmiä
- Satelliittien havaitseminen ja seuraaminen
- Meteorien seuraamiseksi
Joten nyt olen antanut perustiedot ymmärtäminen RADARista , entä yksinkertaisen RADAR-projektin suunnittelu?
Valokuvahyvitykset
- Lohkokaavio näyttää CW RADAR by Radartutorial