Tässä viestissä keskustellaan yleisestä ESC-piiristä tai elektronisesta nopeudenohjauspiiristä, jota voidaan yleisesti soveltaa minkä tahansa tyypin 3 vaiheen BLDC: n tai jopa laturin moottorin ohjaamiseen.
Mikä on ESC
ESC tai elektroninen nopeudensäädin on elektroninen piiri, jota normaalisti käytetään 3-vaiheisen BLDC-moottorin ohjaamiseen ja ohjaamiseen.
BLDC-moottori tarkoittaa harjaton DC-moottoria, joka ilmoittaa selvästi, että tällaisissa moottoreissa ei ole harjoja, aivan päinvastoin kuin harjatut moottorit, jotka kommutointiin tarvitsevat harjoja.
Harjojen puuttuessa BLDC-moottorit pystyvät toimimaan mahdollisimman tehokkaasti, koska harjojen puuttuminen vapauttaa sen kitkasta ja muusta siihen liittyvästä tehottomuudesta.
BLDC-moottoreilla on kuitenkin yksi merkittävä haittapuoli, joita ei voida käyttää yhdellä syötteellä, kuten muita harjattuja moottoreita, vaan BLDC-moottori vaatii 3-vaiheisen ohjaimen niiden käyttämiseksi.
Tästä teknisestä monimutkaisuudesta huolimatta BLDC-moottoreista tulee erittäin edullisia verrattuna harjattuihin vastaaviin moottoreihinsa, koska BLDC-moottorit ovat erittäin tehokkaita virrankulutuksen suhteen ja käytännössä ilman kulumisongelmia.
Siksi BLDC-moottoreita käytetään nykyään sähköajoneuvot , tuulimyllyt, lentokoneet, quad kopterit ja useimmat moottoriin liittyvät laitteet.
Kuten edellä on todettu, BLDC-moottorin käyttö näyttää melko monimutkaiselta, ja jos yrität etsiä ohjainta tai elektronista nopeudenohjauspiiriä BLDC-moottoreille, törmäät todennäköisesti piireihin, jotka ovat liian monimutkaisia MCU: n avulla tai käyttävät vaikeasti löydettäviä komponentteja.
Tässä viestissä opimme tekemään yksinkertaisen ja tehokkaan ESC-piirin, jota voidaan yleisesti soveltaa useimpien BLDC-moottoreiden käyttämiseen pienillä muutoksilla.
Kun olet oppinut piirin yksityiskohdat, voit käyttää sitä rakentamiseen sähköajoneuvot , mönkijäkopterit, robotit, automaattiset portit, pölynimuri ja kaikki moottorikäyttöiset tuotteet mahdollisimman tehokkaasti.
Kolmivaiheiset generaattoripiirit
Koska BLDC-moottori vaatii 3-vaiheisen signaalin, ensimmäinen asia, joka on suunniteltava, on 3-vaiheinen generaattoripiiri.
Seuraavat piirit osoittavat, kuinka tämä voidaan tehdä käyttämällä muutamia käyttöosia käyttää opampeja kun taas toisessa käytetään vain a muutama BJT .
Yksinkertaiset 3-vaiheiset generaattorit


3-vaiheinen signaalilähtö on integroitava a 3-vaiheinen mosfet-ohjainpiiri moottorin käytön mahdollistamiseksi.
Siksi toinen tärkeä elementti on 3-vaiheinen vaihtovirtageneraattorin ohjainpiiri, jonka oletetaan vastaavan yllä olevaan 3-vaihegeneraattoripiiriin liitetyn BLDC-moottorin käyttämiseksi.
Kolmivaiheiselle ohjaimelle voit käyttää mitä tahansa tavallista 3-vaiheista ohjainpiiriä, kuten A4915, 6EDL04I06NT tai vanhaa IRS233-IC: tä.
ESC-piirissämme käytämme IRS233: ta ja katsomme, kuinka tämä voidaan konfiguroida tarkoitetulle elektroniselle nopeuden ohjaukselle ja toteuttaa useimmille BLDC-moottoreille. Seuraava kuva esittää ehdotetun ESC-suunnittelun koko piirin.
ESC-kaavio

Esitetty ESC-laturin ohjainpiiri näyttää melko suoraviivaiselta, eikä se näytä käyttävän monimutkaisia vaiheita.
Kolmivaiheisista generaattoripiireistä hankitut 3-vaiheiset signaalit syötetään NOT-porttien tuloihin, jotka on esitetty yllä olevan kaavion vasemmassa yläkulmassa.
Nämä 3-vaihesignaalit muunnetaan vaadittaviksi Hin- ja Lin-tuloiksi 3-vaihemoottoriohjaimen IC IRS233: lle.
IC IRS233 -kansi käsittelee nämä signaalit käyttääksesi liitettyä BLDC-moottoria oikealla vaiheella ja vääntömomentilla siihen liittyvien kuljettajien mosfettien tai IGBT: n kautta.
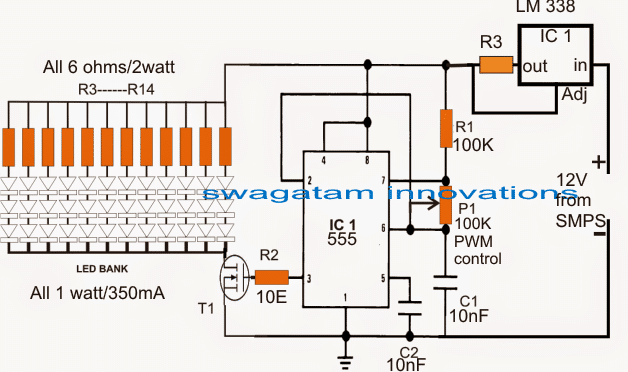
Voimme nähdä myös IC 555 -pohjaisen PWM-vaiheen. Tämä vaihe on määritetty matalien sivujen mosfeteillä tai IGBT: llä, jotta niiden porttiliipaisimet pilkotaan sopiviin osiin.
Tämä portin pilkkominen pakottaa laitteet toimimaan nopeudella, joka on määritetty tällä pilkkomisen PWM-työjaksonopeudella. Laajemmat käyttöjaksot mahdollistavat moottorin pyörimisen nopeammin ja kapeampi käyttöjakso mahdollistavat moottorin hidastumisen suhteessa.
PWM-nopeutta ohjataan IC 555: n kautta ilmoitetun PWM-potin kautta.
Pari: L293 Quad Half-H -ohjaimen IC-liitäntä, tuotetiedot, sovelluspiiri Seuraava: Auton peruutusanturin piiri hälytyksellä