Postissa selitetään yksinkertainen ohjelmoitu taaksepäin suuntautuva moottoripiiri, jota käytetään lelusovelluksen toteuttamiseen. Idean pyysi herra Matthew.
Tekniset tiedot
Olen uusi seuraaja verkkosivustollesi, mikä on hieno resurssi!
Tarvitsen apuasi piirin suunnittelussa.
Tyttärelläni on kouluprojekti, joka on moottoriajoneuvo. Haluaisin pystyä rakentamaan 2-vaiheisen ajastetun piirin, jossa hetkellinen kytkin aktivoi eteenpäin liikkumisen muutaman sekunnin ajan.
Käännä sitten napaisuus päinvastaiseksi muutaman sekunnin ajan. Moottorin jännite olisi 3v. Olisi erittäin hyödyllistä, jos voisit auttaa tätä rakennetta. Kiitos jo etukäteen.
Matty.
Muotoilu
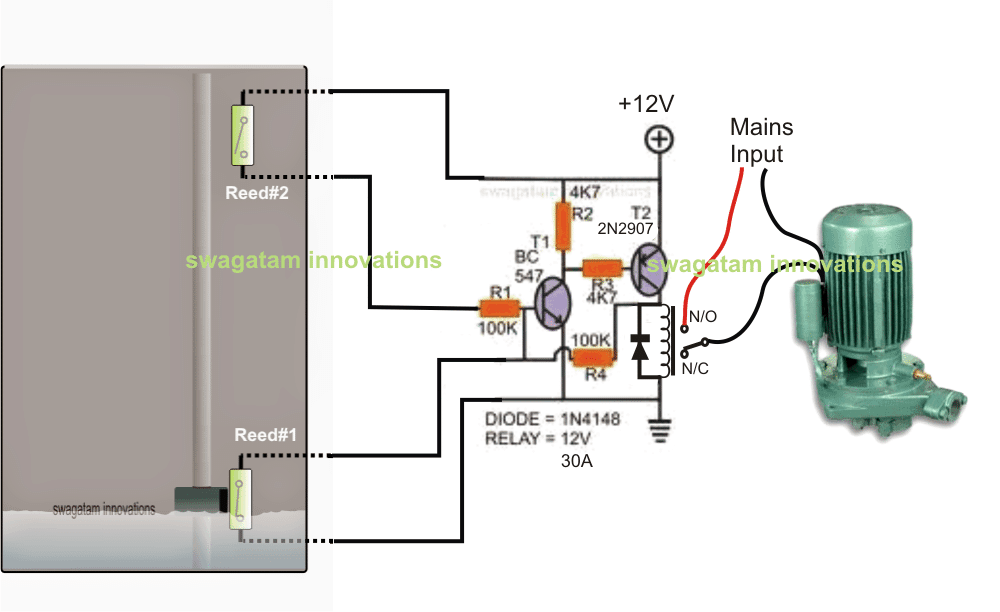
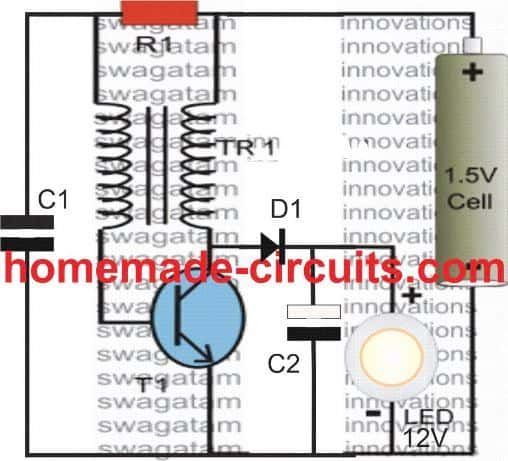
Ehdotettu moottorilelupiiri, jossa on automaattinen taaksepäinohjaus peräkkäisellä viiveajastinpiirillä, voidaan visualisoida seuraavassa kaaviossa:
Viitaten yllä olevaan kaavioon, T1- ja T2-vaihe yhdessä niihin liittyvien komponenttien kanssa muodostavat vakaan multivibtaattorin, jonka oskillaattorin taajuusjakso vastaa haluttua moottorin taaksepäin suuntautuvaa ajoitusjaksoa.
TIP127-porras on lukituspiiri, joka mahdollistaa painikkeen käynnistämisen piirille.
IC 4017 suorittaa eteen- ja taaksepäin impulssit transistorin ohjainvaiheelle, joka käsittää Q1 ----- Q4.

Transistoriohjain on konfiguroitu H-sillaksi helpottamaan moottorin taaksepäin suuntautuvaa liikettä vasteena IC 4017 -lähtöistä vastaanotettuihin liipaisimiin.
Piiri voidaan ymmärtää seuraavan selityksen avulla:
Kun painonappia painetaan hetkellisesti, T3 vastaanottaa lyhyen maapulssin kytkimen kautta, joka käynnistää transistorin kytkemällä sen päälle ja syöttämällä positiivisen pulssin piiriin.
Alustusliipaisin saa aikaan logiikan matalan ilmestymisen IC 4017: n nastalle 4, joka pitää ja salpaa T3: n kiinteään ON-asentoon silloinkin, kun painike on vapautettu.
Samanaikaisesti pin15 vastaanottaa myös positiivisen pulssin palauttamalla IC: n siten, että pin3 alkaa logiikan korkeudella.
Nastalla 3 aluksi korkea aktivoi H-sillan ja moottorin tiettyyn suuntaan riippuen moottorijohtimien napaisuudesta sillaverkon yli.
Nyt T1 ja T2 alkavat laskea ja kun niiden asetettu aika kuluu, nasta 14 vastaanottaa laukaisupulssin T2: n kerääjältä, joka pakottaa pin3: n korkean logiikan siirtymään nastalle2.
Yllä oleva ehto palauttaa H-sillan napaisuuden välittömästi ja saa moottorin aloittamaan vastakkaisen liikkeensä, kunnes seuraava pulssi IC: n nastassa 14 saapuu.
Heti kun seuraava pulssi havaitaan IC 4017: n nastalla 14, IC: n nastalla 2 oleva korkea logiikka liikkuu nyt askeleen eteenpäin ja asettuu IC: n nastalle 4.
Kuitenkin, koska nasta 4 liittyy T3: een, tämän nastan korkea kytkeytyy välittömästi pois päältä T3: n, murtamalla siten salvan ja katkaisemalla virran koko piirille.
Lelumoottoripiiri sammuu nyt kokonaan, kunnes painonappia painetaan uudelleen.
0,1uF-kondensaattori tulisi kytkeä rinnakkain R2: n kanssa siten, että joka kerta, kun virta kytketään päälle, T2 laukaisee ensin PÄÄLLÄ ja mahdollistaa järjestelmän oikean toteutuksen asetettujen aikavälien suhteen.
Aikaviiveiden säätäminen
Aikavälit voidaan asettaa tai säätää käyttäjän mieltymysten mukaan muuttamalla joko R2 / R3: n tai C1 / C2: n tai molempien näiden parien arvoja.
Vaikka piiri on toteutettu leluna tässä, sillä voi olla monia mielenkiintoisia teollisia sovelluksia, ja sitä voidaan muokata suorittamaan useita käyttäjän määrittelemiä koneen aktivointeja.
Pari: LED-jarruvalopiiri moottoripyörälle ja autolle Seuraava: Kauko-ohjattu kattotuulettimen säätöpiiri