
WSG-DSA on tarttujan sormi, joka integroi kosketustunnistuksen korkean resoluution profiilipalautteeseen tarttumisen aikana. Tunnistustarkoituksiin se käyttää älykästä kosketusanturia DSA9205i. Se sopii WSG: n perusleukojen päälle ja on suorassa liitoksessa tarttujan ohjaimeen perusleuissa olevan integroidun anturiportin kautta siten, että kosketuslaitetta ei tarvita ulkoisiin osiin ja kaapeleihin käsittelysovelluksiisi. Tämäntyyppiset sormianturit tunnistavat ja parametroivat WSG. Paineprofiilia voidaan käyttää tarttujaohjaimen sisäpuolelta tehokkaan komentosarjaliittymän avulla. Tässä artikkelissa käsitellään kosketustyyppejä anturit ja niiden toiminta .
Mikä on kosketusanturi?
Kosketusanturi on laite. Se mittaa tulevaa tietoa vastauksena fyysiseen vuorovaikutukseen ympäristön kanssa. Kosketustaju ihmisillä on yleensä mallinnettu, eli iho- ja kinesteettinen aisti. Ihon kosketus pystyy havaitsemaan mekaanisen stimulaation, kivun ja lämpötilan aiheuttamat ärsykkeet. Kinesteettinen kosketus vastaanottaa anturituloja lihasten, jänteiden ja nivelten sisällä olevista reseptoreista.

Kosketusanturi
Taktiiliantureiden tyypit
Alla on erilaisia kosketusantureita
- Voima / vääntömomentti
- Dynaaminen anturi
- Lämpöanturi
Voima / vääntömomentti
Voima / vääntömomentti-antureita käytetään yhdessä kosketusryhmän kanssa tietojen antamiseksi voiman hallintaa varten. Nämä antureiden tyypit voi tunnistaa kuormituksen missä tahansa kuten manipulaattorin distaalinen linkki ja rajoituksissa ihoanturina. Ihosensori tarjoaa yleensä tarkemman voimanmittauksen suuremmilla kaistanleveyksillä. Jos manipulaattorin linkki on määritelty yleisesti ja oletetaan signaalipistekontakti, voima / vääntömomentti-anturi voi antaa tietoa voiman ja momenttien kosketuspaikasta - sitä kutsutaan sisäiseksi kosketusanturiksi. Momenttianturin kuva on esitetty alla.

Voima- tai momenttianturi
Dynaaminen anturi
Dynaamiset anturit ovat pienempiä kiihtyvyysanturit robotti sormen nauhoissa tai ihossa. Yleinen toiminto, kuten Pacinian-verisuonet ihmisillä ja niillä on yhtä suuret vastaavat kentät, joten yksi tai kaksi ihon kiihtyvyysanturia riittää koko sormelle. Nämä anturit havaitsevat tehokkaasti kosketuksen muodostumisen ja katkeamisen, värähtelyt, jotka liittyvät liukuviin tekstuuripintojen yli.

Dynaaminen anturi
Jännitysanturi on toisen tyyppinen dynaaminen kosketusanturi. Jos sormenpää liukuu muutaman cm / s: n nopeudella, pinnalla on pieniä kuoppia tai kuoppia, väliaikaiset muutokset ihossa ovat tärkeitä. Pietsosähköinen polymeeri, kuten PVDF, tuottaa varauksen vasteena vaurioille, joita voidaan käyttää tuottamaan virta, joka on suoraan verrannollinen muutosalueeseen.
Lämpöanturi
Lämpöanturit ovat tärkeitä ihmisen kyvylle tunnistaa tehtyjen esineiden materiaalit, mutta joitain niistä käytetään myös robotiikassa. Lämpöanturilla havaitaan ihon lämpögradientit, jotka vastaavat kohteen lämpötilaa ja lämmönjohtavuutta. Robottilämpöanturit ovat mukana Peltier-risteyksissä yhdessä termistorit .

Lämpöanturi
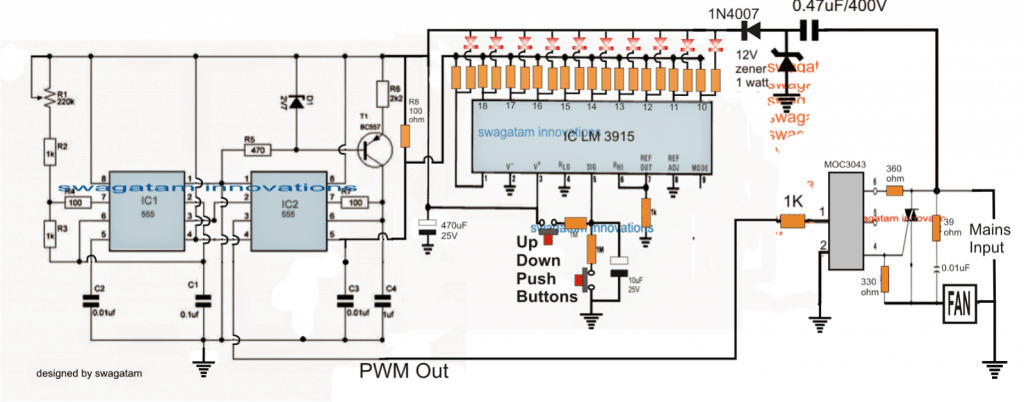
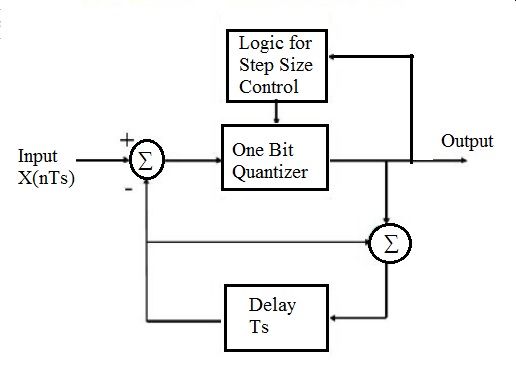
Tactile-anturin toimintaperiaate ja piirikaavio
Kosketusanturit on kehitetty tarjoamaan kosketustunnistuskyvyt teleoperaattoreille ja älykkäille robotteille. Taktiilianturit voivat tunnistaa kosketuspikseleihin kohdistuvan normaalin voiman voimanhallinnan ja kosketuskuvien lumoamiseksi ja objektitunnistuksen luomiseksi. Tactil-kuvien ja normaalien voimien saamiseksi tangentiaalinen tieto on kriittinen voimanhallinnalle ja liukastumisen estämiselle, joka lumoaa tehtävän onnistumiselle - siten tarvitaan kolmiulotteisia kosketusantureita.

Kosketustunnistimen piirikaavio
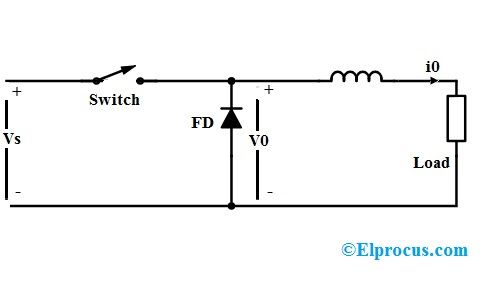
On olemassa useita kolmiulotteisia kosketusantureita, jotka on kehitetty käyttämällä pietsoresistiivisiä, kapasitiivisia ja valinnaisia antureita, ja nämä kosketusanturit valmistetaan MEMS-tekniikka . Integroidut anturielementit ja esikäsittelypiirit ovat pienikokoisia, mutta ne ovat liian heikkoja ja helposti rikkoutuvia useimmissa sovelluksissa, ja esimerkiksi kosketusanturin voima-alue on vain 0,01 N w4x ja muut kosketusanturit eivät ole tarjoaa MEMS-tekniikka. Alla oleva piirikaavio näyttää kosketusanturipiirin.
Taktiilisensori robotiikassa
NASA-robotteissa käytetty kosketusanturi on esitetty alla
- Yksi esimerkkeistä, jotka liittyvät suoraan planeetan tutkimiseen.
- NASA käyttää näitä antureita kansainvälisellä avaruusasemalla auttaakseen ihmisiä korjaamaan / ylläpitämään ympäristöä
- NASA on kokeillut monia robotiikan kosketusantureita, jotka ovat alkuvaiheessa. He ovat käyttäneet Voimaa tunnistava vastus , ja nyt kvanttitunnelointikomposiitit ovat käytössä
- Teollisuusrobotti tuottaa useita kuormituspainikkeita ja kennoja kosketusantureiden kehittämiseksi
Kosketustunnistinsovellukset
Kosketus anturisovellukset käytetään
- Robotiikka
- Tietokoneen kovalevy
- Turvallisuusjärjestelmä
- Kosketusnäyttö matkapuhelimella
- Laskenta
Kosketustunnistimen edut
Kosketustunnistimen edut on annettu alla:
- Ne tarjoavat helppokäyttöisiä kosketusanturiratkaisuja
- Kosketusanturissa ei ole ulkoisia komponentteja ja kaapeleita
- Kompakti uuttaminen
- Verifioitu kosketusanturitekniikka robotiikasta.
Tämä koskee kosketusanturin toimintaperiaatetta ja sovelluksia. toivomme, että annetuista tiedoista on apua hyvän tiedon ja ymmärryksen tarjoamisessa projektista. Lisäksi, jos sinulla on kysyttävää tästä käsitteestä sähköiset ja elektroniset projektit , voit kommentoida alla olevassa osiossa. Tässä on kysymys sinulle - mitkä ovat kosketusantureiden toiminnot?
Valokuvahyvitykset:
- Kosketusanturi neliötila
- Voima / vääntömomentti anturitekniikat
- Dynaaminen anturi vernier
- Lämpöanturi images-amazon







![Kosketuksettoman vaihtovirtavaiheen ilmaisinpiiri [testattu]](https://electronics.jf-parede.pt/img/sensors-detectors/38/non-contact-ac-phase-detector-circuit.png)

{kind=link}
{kind=link}
{kind=link}