Sähkökone, joka muuntaa sähköenergian mekaaniseen energiaan kutsutaan sähkömoottoriksi. Ensinnäkin sähkömoottori on yksinkertainen sähköstaattinen laite, jonka Skotlannin munkki Andrew Gordon loi 1740-luvulla. Mutta vuonna 1821 Michael Faraday osoitti sähköenergian muuntamisen mekaaniseksi energiaksi.
Sähkömoottorit luokitellaan ensisijaisesti kahteen luokkaan: vaihtovirtamoottorit ja DC-moottorit . Kukin luokka on jälleen jaettu moniin tyyppeihin. Monet kuormat, kuten sekoitin, jauhin, tuulettimet jne., Ovat yleisimmin käytettyjä kodinkoneita, joista löydämme erityyppisiä moottoreita ja joita voidaan käyttää eri nopeuksilla moottoreiden nopeuden säätimellä. Tässä artikkelissa aiomme keskustella yhdestä päämoottorityypistä, nimittäin Askelmoottori ja sen ohjaus käyttämällä mikro-ohjainta.
Askelmoottori
Synkroninen ja harjaton DC-moottori joka muuntaa sähköpulssit mekaanisiksi liikkeiksi ja siten pyörii vaiheittain tietyllä kulmalla jokaisen vaiheen välillä täydellisen pyörimisen suorittamiseksi kutsutaan Askelmoottoriksi. Askelmoottorin pyörimisvaiheiden välistä kulmaa kutsutaan moottorin askelmakulmaksi.

Askelmoottori
Askelmoottorit luokitellaan kahteen tyyppiin käämityksen mukaan: Unipolar-askelmoottorit ja kaksisuuntaiset askelmoottorit. Yksinapaista askelmoottoria käytetään usein monissa sovelluksissa, koska se on helppokäyttöinen verrattuna kaksisuuntaiseen askelmoottoriin. Mutta on olemassa erityyppisiä askelmoottoreita, kuten pysyvä magneetti-askelmoottori, vaihtelevan reluktanssin askelmoottori ja hybridimotori.
Askelmoottorin ohjaus
Askelmoottoria voidaan ohjata eri tekniikoilla, mutta tässä keskustelemme askelmoottorin ohjauksesta Atmega-mikrokontrolleri . 89C51 on laitteen mikrokontrolleri 8051-mikrokontrolleriperhe .

Lohkokaavio askelmoottorin ohjauksesta
8051-mikrokontrolleria käyttävän askelmoottorin ohjauksen lohkokaavio on esitetty kuvassa virtalähde , mikro-ohjain, askelmoottori ja ohjauskytkinlohkot.
2 tapaa askelmoottorin ohjauspiirin suunnitteluun
Askelmoottorin ohjain on suunniteltu käyttämällä 8051-mikrokontrollereita ja kytkentäpiiri askelmoottorin nopeuden säätämiseksi. Ohjauskytkimen piiri voidaan suunnitella käyttämällä transistorin kytkimet tai käyttämällä askelmoottorin ohjain-IC: tä, kuten ULN2003, transistorien sijasta.
1. Ohjauspiiri askelmoottorin ohjainpiirillä
Yksinapaista askelmoottoria voidaan pyörittää syöttämällä staattorikäämiä peräkkäin. Näiden moottorikelojen tai -johtimien kautta syötettyjen jännitesignaalien jakso on riittävä moottorin käyttämiseksi, joten ohjainpiiriä ei tarvita staattorikäämin virran suunnan säätämiseen.

Askelmoottorin ohjaus IC: llä
Kaksivaiheinen askelmoottori koostuu neljästä keloihin liitetystä päätyjohdosta ja kahdesta pääjohteesta liitetystä kahdesta johtimesta muodostaen kaksi vaihetta. Kahden vaiheen yhteiset pisteet ja päätepisteet on kytketty vastaavasti maahan tai Vcc ja mikrokontrollerin nastat. Moottorin pyörittämiseksi kahden vaiheen päätepisteet tulee virrata. Ensisijaisesti jännite syötetään vaiheen 1 ensimmäiseen päätepisteeseen ja edelleen jännite vaiheen 2 ensimmäiseen päätepisteeseen ja niin edelleen.
Askelmoottoria voidaan käyttää eri toimintatiloissa, kuten Wave Drive Stepping Mode, Full Drive Stepping Mode ja Half Drive Steping Mode.
Wave Drive -asennustila
Toistamalla yllä oleva sekvenssi moottoria voidaan pyörittää aalto-askel-askelmoodissa joko myötä- tai vastapäivään päätepisteiden valinnan perusteella. Seuraavassa taulukossa on esitetty signaalivaihejärjestys aalto-askel-askelmoodille.


Wave Drive -asennustila
Täyden ajon porrastustila
Eri vaiheiden kahden päätepisteen energisoiminen saavuttaa samanaikaisesti täyden ajon askelmoodin. Taulukossa esitetään signaalivaihejärjestys täydellä taajuusmoodilla.


Täyden ajon porrastustila
Puoliajoasennustila
Aalto- ja täyden ajon porrastustilojen yhdistelmällä saavutetaan puolen aseman porrastustila. Siten tässä tilassa askelkulma jaetaan puoleen. Taulukko näyttää puoliajoasennustilan signaalivaihejärjestyksen.


Puoliajoasennustila
Yleensä askelkulma riippuu askelmoottorin resoluutiosta. Askeleiden koko ja pyörimissuunta ovat suoraan verrannollisia syötesekvenssin lukumäärään ja järjestykseen. Akselin pyörimisnopeus riippuu tulosekvenssin taajuudesta. Vääntömomentti ja magneettien lukumäärä kerrallaan ovat verrannollisia.
Askelmoottori vaatii 60 mA: n virran, mutta Atmega-mikrokontrollerin AT89C51 maksimivirta on 50 mA. Joten, askelmoottori-ohjainta IC on käytetty liittämään askelmoottori mikrokontrolleriin signaalien siirtämiseksi.
2. Ohjauskytkimen piiri käyttämällä transistoreita
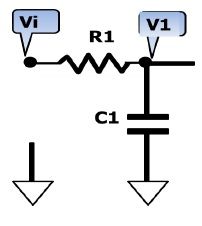
Piirin virransyöttö voidaan antaa vähentämällä jännitettä 230 V: sta 7,5 V: iin käyttämällä alamuuntajaa ja sitten tasasuuntaamalla silta-tasasuuntaajalla, jossa on diodit . Tämä tasasuuntainen lähtö syötetään suodatinkondensaattoriin ja johdetaan sitten jännitesäätimen läpi. 5 V: n säädetty lähtö saadaan jännitesäätimestä. Palautustappi 9 on kytketty kondensaattorin ja vastuksen väliin.

Askelmoottorin ohjauspiiri transistorilla
Yleensä askelmoottori koostuu neljästä kelasta kuvan osoittamalla tavalla. Joten moottorin käyttämiseksi tarvitaan neljä moottori-ohjainpiiriä. Sen sijaan, että moottoria käytettäisiin askelmoottorin ohjain-IC: tä, neljä transistoria kytketään ohjainpiireinä vastaavasti mikro-ohjaimen 21, 22, 23 ja 24 nastassa.
Jos transistorit aloittavat johtamisen, kelan ympärille syntyy magneettikenttä, joka aiheuttaa moottorin pyörimisen. Askelmoottorin nopeus on suoraan verrannollinen tulopulssin taajuuteen. Kideoskillaattori on kytketty nastoihin 18 ja 19 mikrokontrollerin kellotaajuuden aikaansaamiseksi noin 11,019 MHz.
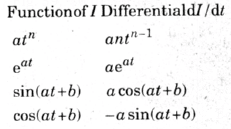
Minkä tahansa käskyn suoritusaika voidaan laskea alla olevan kaavan avulla
Aika = ((C * 12)) / f
Missä C = syklin numero
Ja F = kidetaajuus
Yksi sovelluspohjainen piiri, joka käyttää askelmoottoria aurinkopaneelin pyörittämiseen, kuvataan alla.
Askelmoottorin ohjaus ohjelmoidulla 8051-mikrokontrollerilla
Aurinkopaneeli-aurinkopaneeliprojekti on tarkoitettu tuottamaan enimmäismäärä energiaa säätämällä aurinkopaneelia automaattisesti. Tässä projektissa 8051-perheen ohjelmoidun mikrokontrollerin ohjaama askelmoottori on liitetty aurinkopaneeliin, jotta aurinkopaneelien kasvot pysyvät aina kohtisuorassa aurinkoon nähden.

Askelmoottorin ohjaus käyttämällä mikrokontrolleria, kirjoittanut Edgefxkits.com
ohjelmoitu mikro-ohjain generoi porrastettuja sähköpulsseja säännöllisin väliajoin askelmoottoriin aurinkopaneelin pyörittämistä varten. Ohjaimen IC: tä käytetään askelmoottorin käyttämiseen, koska ohjain ei pysty toimittamaan moottorin tehovaatimuksia.
Jätä ehdotuksesi, palautteesi ja kyselysi lähettämällä kommentteja alla olevaan kommenttiosioon. Teemme parhaamme auttaaksemme sinua teknisesti tässä artikkelissa ja sähkö- ja elektroniikkaprojektien kehittäminen käyttämällä askelmoottoria.