Artikkelissa selitetään yksinkertainen linjaseuraajaajoneuvopiiri, joka tunnetaan myös nimellä linjaseurantaajoneuvo, jossa käytetään vain pari op-vahvistinta ja muutama muu komponentti ilman monimutkaisia Arduino- tai mikro-ohjaimia.
Mikä on linjaseuraajaajoneuvo
Linjaseuraajaajoneuvo on automaattisen opastetun ajoneuvon (AGV) muoto, joka kulkee havaitsemalla maahan piirretty tai upotettu valkoinen viiva. Ilmaisimien signaali käskee moottoroituja pyöriä kääntymään ja säätymään automaattisesti linjan mukaisesti, jolloin saadaan vaikutelma, että ajoneuvo seuraa linjaa. Tästä syystä nimirivin seuraaja.
Periaatteessa ilmaisimet ovat muodossa valokuvavastukset, kuten LDR: t tai puolijohteiden valonilmaisimet, kuten valodiodit tai valotransistorit .
Pari sellaista valonilmaisimet Niitä käytetään havaitsemaan valkoisen viivan heijastunut valo ja kytkemään transistoroidut piirit tai op-vahvistimiin perustuvat vertailijat, jotka puolestaan ohjaavat ajoneuvon pyörämoottoreita ohjaamaan maalla olevan valkoisen viivan käännösten ja käyrien mukaisesti.
Ikkunavertailijoiden käyttäminen
Ehdotetussa linjaseuraajaajoneuvopiirissä olemme käyttäneet pari op-amp-vertailijat oli kytkemässä moottorit tasapainotukseen.
Op-vahvistimet on kiinnitetty ikkunaksi jakajat . Kuten nimestä voi päätellä, ikkunavertailija vertaa ilmaisimien tulosignaalia kahteen äärimmäiseen jänniteohjearvoon, jotka muodostavat 'ikkuna' kynnysarvot. Niin kauan kuin tulosignaalin taso on tämän 'ikkuna' -viitekynnyksen sisällä, molempien op-vahvistimien ulostulo ylläpitää korkeaa logiikkaa lähdöissään.
Siinä tapauksessa, että tulosignaali pyrkii ylittämään referenssikynnykset, vastaava op-vahvistimen lähtö muuttuu matalaksi, mikä johtaa vastakkaisiin lähtöihin op-vahvistimista. Tämä epätasapaino kehottaa lähtölaitteita korjaamaan tilanteen vaihtamalla kuormat asianmukaisesti.
Kuinka piiri toimii
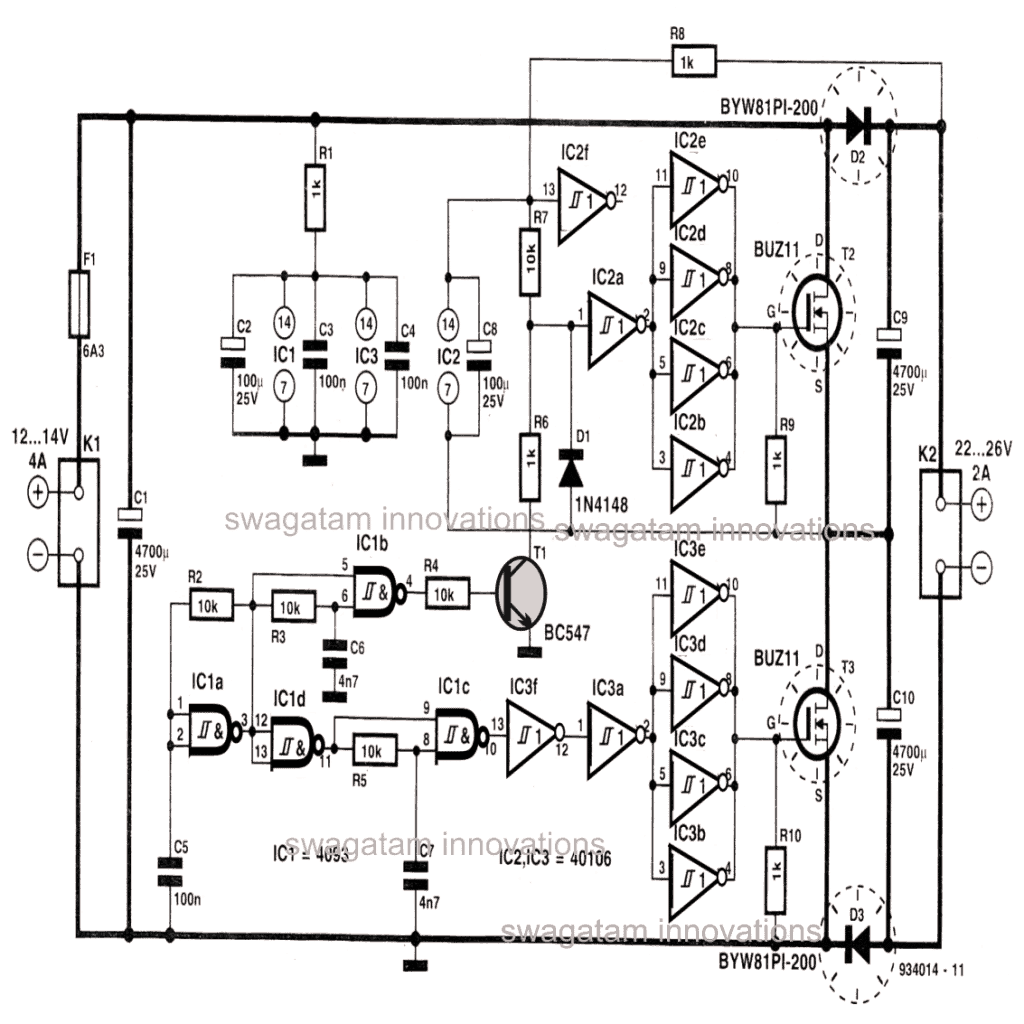
Viitaten alla olevaan linjaseuraajaajoneuvon piirikaavioon voimme nähdä kaksi op-vahvistinta, jotka on konfiguroitu ikkunakompartoreiksi.

Op-vahvistimet voivat olla IC: ltä LM358 tai LM324
Ylempi op-vahvistin on kytketty ohjaamaan ylemmän kynnysrajan, kun taas alempi op-vahvistin on kytketty alemman kynnysrajan ohjaamiseksi.
Op-vahvistimen A1 käänteinen tulo ja op-vahvistimen A2 ei-invertoiva tulo kiinnitetään kiinteällä referenssijännitteellä
Op-vahvistimen A1 ei-käänteinen tulo ja op-vahvistimen A2 käänteinen tulo on sidottu yhteen ja niitä käytetään valonilmaisimien tulosignaalin vaihteluiden havaitsemiseen.
Kaksi valosta riippuvaa vastusta, LDR1 ja LDR2, jotka toimivat kuten valoherkät laitteet, sijoitetaan valonilmaisimiksi siten, että ne vastaanottavat heijastuneen valon valkoisesta viivasta tasaisesti.
Niin kauan kuin LDR: n valo on riittävän korkea ja tasainen, A1: n pin3 pysyy korkeammana kuin sen pin2, koska LDR1 on kiinnittynyt positiiviseen viivaan. Tämä saa sen tuotoksen menemään korkealle.
Samoin A2: n nasta 6 pidetään nastan 5 alapuolella johtuen LDR2-yhteydestä maajohtoon, mikä mahdollistaa A2: n lähdön pysymisen korkealla.
Toisin sanoen, kun LDR: t ovat tasaisesti valaistuina, kummankin op-vahvistimen ei-invertoivat (+) tulot pidetään korkeammalla kuin niiden käänteiset (-) -tulot, mikä saa aikaan niiden lähdöt menemään korkealle.
Molempien lähtöjen ollessa korkeat, transistoriohjaimet pitävät moottorit käynnissä tasaisesti, mikä antaa vastaavasti ajoneuvon sujuvan suoran yli.
Kuinka ajoneuvo seuraa linjaa
Kun kohdataan kaareva valkoinen viiva, yksi LDR: stä poikkeaa linjasta aiheuttaen valoeroa piirin kohdassa A. Tämän seurauksena asiaankuuluva op-vahvistimen lähtö menee matalalle ja kyseinen moottori pysähtyy hetkellisesti.
Tässä tilanteessa toinen edelleen toimiva sivumoottori pakottaa ajoneuvon kääntymään kohti viivan taipumiskulmaa, mikä tuo varjostetun LDR: n takaisin valkoisen viivan valaistulle alueelle. Kun näin tapahtuu, molemmat moottorit alkavat jälleen toimia, jolloin ajoneuvo voi toimia normaalisti.
Edellä mainittu automaattinen ON / OFF-kytkentä vasemman / oikean moottorin yli vasteena taivuttavien valkoisten viivojen valon vaihteluille pakottaa ajoneuvon jatkamaan säätämistä ja ohjaamista valkoisen viivan mukaisesti.
Kuinka rakentaa ajoneuvo
Yhdessä aikaisemmista kirjoituksistani opimme kuinka yksinkertainen kauko-ohjattava ajoneuvo voitaisiin rakentaa vain muutamalla moottorilla, jotka on kiinnitetty suorakaiteen muotoisen levyn takareunaan, ja parilla nuken pyörää levyn etureunassa.

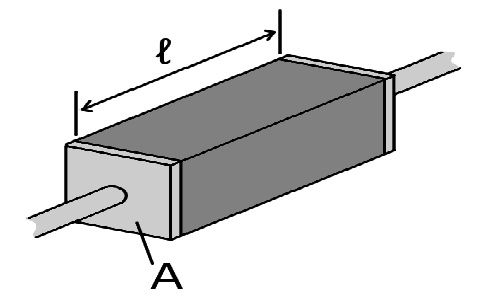
Ehdotetulle linjaseuraajaajoneuvopiirille myös käytämme samanlaista rakennetta ajoneuvolle, kuten yllä olevassa kuvassa on esitetty.
Järjestely näyttää melko yksinkertaiselta, takapyörät on kiinnitetty moottoreilla, joita transistoriohjaimet ohjaavat op-vahvistimen ulostulojen yli.
Kun ajoneuvo poikkeaa linjasta, LDR: ien valotason ero kytkee pois päältä yhden op-vahvistimen ja pysäyttää kyseisen moottorin.
Tämä pakottaa toimimaan vastakkaisen sivumoottorin kääntymään pysäytetyn moottorin puolta kohti, mikä tarkoittaa, että jos vasemmanpuoleista moottoria jarrutetaan, ajoneuvo joutuu kääntymään vasemmalle kohti taivutuslinjaa sopeutumalla samaan suuntaan.
Tämä viittaa myös siihen, että vasen / oikea moottorin integrointi op-vahvistimen lähtöihin tulisi tehdä asianmukaisesti siten, että linjan taivutussuunta ja pysäytetty moottori ovat ajoneuvon samalla puolella.
Kuinka sijoittaa LDR: t
Koska kahden LDR: n (LDR1 ja LDR2) oletetaan aistivan valkoisen viivan heijastuneen valon tasaisesti, niiden suuntauksen tulisi olla kohtisuorassa viivan pituuteen nähden, kuten alla on esitetty.

Tässä oletetaan, että ajoneuvo kulkee oikealta vasemmalle noudattaen samalla polulla asetettua linjaa.
LDR: ien kokonaisleveyden tulisi olla linjan leveyden sisällä.
LDR: t ja LED-valot tulisi asentaa ajoneuvon pohjapintaan ja mieluiten takasivulle, suoraan takapyöräsarjan alle.
Ilmoitettu LED on valkoinen LED, jossa on sarja 1K -vastus. Sen on sijaittava lähellä LDR: itä ja keskellä, jotta LDR: n valo ei pääse suoraan LDR: iin, sen sijaan valon tulisi saavuttaa LDR: t heijastamalla niiden alla olevaa valkoista viivaa.
Moottorin tiedot
Moottorit voivat olla mitä tahansa kestomagneettiharjattua tyyppiä, mutta ne tulisi varustaa vaihdelaatikolla, jotta ajoneuvon liike on riittävän hidasta ja tasaista.
Moottorin nimellistehon tulisi olla kuorman mukainen, jonka ajoneuvon on tarkoitus kantaa. Tämä voidaan testata käytännön kokeilla.
Kuinka perustaa
Tämän linjaseuraajaajoneuvopiirin muodostamiseksi sinun on järjestettävä pieni valkoiselle viivalle maalattu tasainen pinta tai tasainen pintaan tarttunut valkoinen nauha.
Aseta järjestelmä (ilman pyöriä) viivan yli edellisen kaavion mukaisesti siten, että LDR: t ja LED on oikein säädetty linjan leveyden sisällä.
Kytke virta päälle, valkoisen LEDin tulisi valaista sen alla oleva alue kirkkaasti. Säädä kahta esiasetusta, kunnes molemmat moottorit kytketään päälle samanaikaisesti.
Siirrä yksikköä nyt hieman oikealle niin, että LDR1 siirtyy pois valkoisesta viivasta.
Vasemman moottorin tulisi pysähtyä. Jos se ei toimi, säädä P1: tä vasta, kun vasen moottori vain pysähtyy.
Siirrä seuraavaksi yksikköä hieman vasemmalle niin, että LDR2 siirtyy pois valkoisesta viivasta. Tämän pitäisi pysäyttää oikeanpuoleinen moottori. Jos se ei säädä 10 k: n esiasetusta, kunnes oikeanpuoleinen moottori vain pysähtyy.
Tämä viimeistelee asennustoimenpiteet ja nyt voit asentaa pyörät moottoreihin ja käyttää tätä ohjattua ajoneuvoa seuraamaan automaattisesti asetettua radaa maassa.
Valkoinen viiva vs musta viiva
Ehdotettu linjaseuraajaajoneuvojärjestelmä perustuu maahan upotettuun valkoiseen viivaan mustan viivan sijaan. Etuna valkoisen viivan käytöstä mustan viivan sijaan on seuraava:
Valkoinen viiva näyttää tyylikkäämmältä ja kunnollisemmalta kuin musta viiva.
Valkoisella viivalla toimiva linjaseuraaja voi toimia myös täydellisissä pimeissä tai himmeissä ympäristön valoissa. Mustavaloon perustuvat mallit edellyttävät yleensä ulkoista valaistusta pitääkseen ajoneuvon toiminnassa.
Valkoviivapohjainen AGV toimii tarkemmin laattojen väristä riippumatta, lukuun ottamatta laattoja, jotka ovat erittäin valkoisia tai vastaavat valkoisen viivan väriä.
Ajoneuvon muuttaminen mustan viivan seuraajaksi
Edellä mainituista eduista huolimatta, jos käyttäjä haluaa ajoneuvon noudattavan mustaa viivaa, järjestelmä voidaan helposti muuntaa tekemään muutama nopea muutos ehdotetussa mallissa.
Käyttäjä voi vain vaihtaa tai vaihtaa op-vahvistinten tulonastaliitännät esiasetusten kanssa ja poistaa LDR: iin liittyvän LEDin.
Pari: 50 watin siniaalto UPS-piiri Seuraava: Perustiedot elektronisista piireistä - Aloittelijan opas elektroniikkaan