Tässä viestissä tutkitaan, mikä on BLDC-moottori, ja opimme myöhemmin anturittoman BLDC-moottorin ohjainpiirin suunnittelusta.
BLDC-suorittimen tuulettimet
Oletko nähnyt ne nopeasti liikkuvat tuulettimet suorittimissa, jännitteenvakaajissa, DVD-soittimissa ja muissa vastaavissa laitteissa, jotka toimivat erittäin tehokkaasti, kuluttavat vähän tilaa, virtaa ja pystyvät kuitenkin suorittamaan tärkeät toiminnot tietylle laitteelle määrätyllä tavalla?
Kyllä, nämä ovat kaikki BLDC-puhaltimien tai harjattomien tasavirtamoottoreiden modernit versiot, jotka ovat paljon parempia kuin vanhat perinteiset harjatut moottorit.

Kuva: https://fi.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
BLDC-moottori vaatii kuitenkin hienostuneen ohjainpiirin, ja kyllä, kaikki nämä CPU-tuulettimet sisältävät nämä ohjainmoduulit sisäänrakennettuna, vaikka niitä näyttää olevan helppo käyttää tavallista DC: tä käyttämällä, sisäisesti järjestelmä on jo varustettu älypiirillä.
BLDC-moottorin ohjain
Täältä opit yhdestä tällaisesta älykkäästä BLDC-moottorin ohjainpiiristä, jossa käytetään yhtä sirua DRV10963 minkä tahansa pienen BLDC-moottorin ajamiseksi uskomattomalla tehokkuudella, ja myöhemmin yhdessä tulevista artikkeleista näemme, kuinka tätä IC-piiriä voidaan päivittää jopa ajettaessa tehokkaat suurivirtaiset BLDC: t, kuten sellaiset, jotka ovat käytetään nelikopterissa.
Mutta ennen tätä olisi mielenkiintoista oppia vähän BLDC-moottoreista.
Ero harjattujen ja harjattomien tasavirtamoottoreiden välillä
Harjatun moottorin ja harjattoman moottorin ja hyötysuhteen ero on melko ilmeinen.
Koska harjattujen moottoreiden haavavaruste itsessään liikkuu magneettien välillä, on käytettävä 'harjoja' (hankauskontakteja) niin, että liikkuvat kelapäätteet pystyvät ottamaan syöttöjännitteen johdonmukaisesti tarvitsematta itse päästä syöttölähteeseen, mikä muuten tekisi mahdotonta ja vaarantaa toiminnan.
Harjattomassa moottorissa kela tai käämi ei koskaan liiku ja on vakio, tässä roottori kuljettaa joukkoa kestomagneetteja ja pyörii ympäröivän käämityksen magneettivuon vaikutuksesta.
Koska magneetti on vapaa kaikista vaivoista ja kykenee toimimaan ilman päätelaitteita hallitsemaan tai vastaanottamaan virtaa, se voi edetä vaivattomasti, pyöriä nopeasti ja käytännöllisesti katsoen meluttomalla tasolla.
Mutta täällä on saalis. Jotta sähkömagneetti reagoisi kestomagneetin virtauksiin, magneettisen vaiheen tai pylväiden on tapahduttava jatkuvasti, jotta molemmat osapuolet pystyvät reagoimaan jatkuvasti ja käymään läpi vastavoiman vapauttamalla vaaditun vääntövoiman roottori ja suorita pyöriminen saadulla vääntömomentilla.
Harjatussa moottorissa tämä on helpompaa johtuen ankkurikäämin itsesäätyvästä luonteesta, joka pystyy pyörimään ja luomaan itsensä ylläpitävän vastakkaisen magneettisen voiman ja jatkamaan pyörimistä ilman ulkoisten pulssien tai prosessoinnin tarvetta.
BLDC: ssä siitä tulee kuitenkin ongelma, koska magneettiroottori pysyy 'avuttomana' ja vaatii lasketulta magneettikomennolta käämiltä pyörimään mielekkäällä tavalla eikä sattumanvaraisella tavalla.
Siksi kaikki BLDC-moottorit vaativat pakollisesti moottorin ohjainpiirin komentamaan moottorin sisällä olevia kolmea erillistä käämitysjoukkoa.
Siten kaikki BLDC ovat olennaisesti 3-vaihemoottoreita ja vaativat pakollisesti 3 vaihetta pyörivän momentin tuottamiseksi roottorille.
Mitä sensoriton BLDC-ohjain tekee
Anturivapaa BLDC-ohjainpiiri yksinkertaisesti sähköistää 3 käämityssarjaa peräkkäin siten, että magneettinen roottori pystyy käymään läpi tasaisen vastavoiman, jonka avulla moottori voi saavuttaa jatkuvan vääntömomentin ja pyörimisvoiman.
Mutta tätä BLDC-käämityksen peräkkäistä virtapiiriä ei voida asettaa vain satunnaisesti, sen on oltava tandemissa tai vasteena roottorin magneetin pyörimisasentoon, muuten toteutus voi mennä hajanaiseen suuntaan ja voimme nähdä moottorin akselin (roottori) ) pyörimällä sattumanvaraisesti, eli nykimällä myötä- ja vastapäivään ilman järkevää pyörimistä.
Miksi antureita käytetään BLDC-moottoreissa
Siksi esitellään anturit, jotka on sijoitettu monien BLDC-moottoriversioiden sisään, nämä anturit (tyypillisesti Hall-efektianturit) 'ymmärtävät' roottorin magneetin magneettisten napojen muuttuvan aseman, ohjeistavat liitettyä prosessoripiiriä sähköistämään vastaavan käämityksen ja suorittamaan pyörimisliikkeen optimaalisella vääntömomentilla.
Hall-efektiantureita käytetään tehokkaasti useimmissa BLDC-moottoreissa, jotka ovat kooltaan suhteellisen suuria, mutta pienemmille moottoreille, kuten CPU-puhaltimille, CPU-asemille, DVD-soittimille, pienille pakopuhaltimille, nelikoptereissa käytettäville moottoreille, Hall-tehoanturit voivat tulla sopimattomiksi ja siksi toteutetaan vaihtoehtoinen anturivähempi lähestymistapa.
Tähän sisältyy käämin luontaisen takaisin EMF-sähkön hyödyntäminen, jota pidetään vertailulähteenä asiaankuuluvien käämitysjoukkojen prosessoinnissa ja sähköistämisessä sekä kiertomomentin toteuttamisessa.

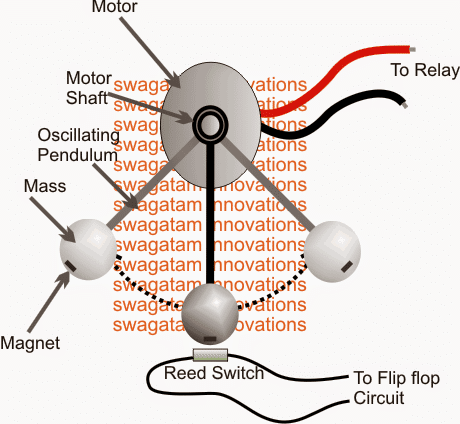
BLDC-roottorin liikkeen simulointi
Edellä olevassa raakasimulaatiossa voimme visualisoida, kuinka vapautettu takaisin EMF otetaan vertailukohteeksi ja kuinka käytetään tuottamaan sekvenssipulsseja seuraaville käämitysjoukoille asettamalla pyörivän momentin kestomagneettikeskiroottorille. Simulaatio ei välttämättä ole tarkka replikointi, mutta se antaa karkean kuvan toimintaperiaatteesta.
On mielenkiintoista huomata, että pulssi kytkeytyy, kun magneetin N / S on täsmälleen käämin sydämen keskellä, mikä sallii käämityksen joko virrata N tai S pulssin napaisuudesta riippuen ja tuottaa houkuttelevan ja hylkivän voima N / S-magneeteille, mikä tuottaa vaaditun vääntömomentin suurimmalla mahdollisella tasolla.
Ja tämä puolestaan tulee mahdolliseksi taka-EMF: n ansiosta, joka vapautuu edellisen käämityksen kytkennän kautta.
Yllä oleva keskustelu selventää antureita sisältävän BLDC-moottorin toimintaa, nyt opitaan, kuinka määritelty piiri käsittelee yllä olevaa monimutkaista 3-vaihekytkennän toimintaa
BLDC-ohjain DRV10963
Jonkin Googlingin jälkeen löysin tämän sensoriton BLDC-ohjainpiirin käyttäen yhtä sirua DRV10963, joka käyttää merkityksetöntä määrää osia kokoonpanossa ja pystyy kuitenkin toteuttamaan hienostuneen prosessoinnin suunnitelluille toiminnoille.
DRV10963 on huipputekniikkainen siru, joka on erityisesti suunniteltu toimimaan vähemmän antureita sisältävillä BLDC-moottoreilla vain ennakoimalla takaosan EMF moottorin käämityksestä ja antamalla tarkka komento käämitykselle ja saavuttamalla optimaalinen kiertomomentti roottorin päällä.
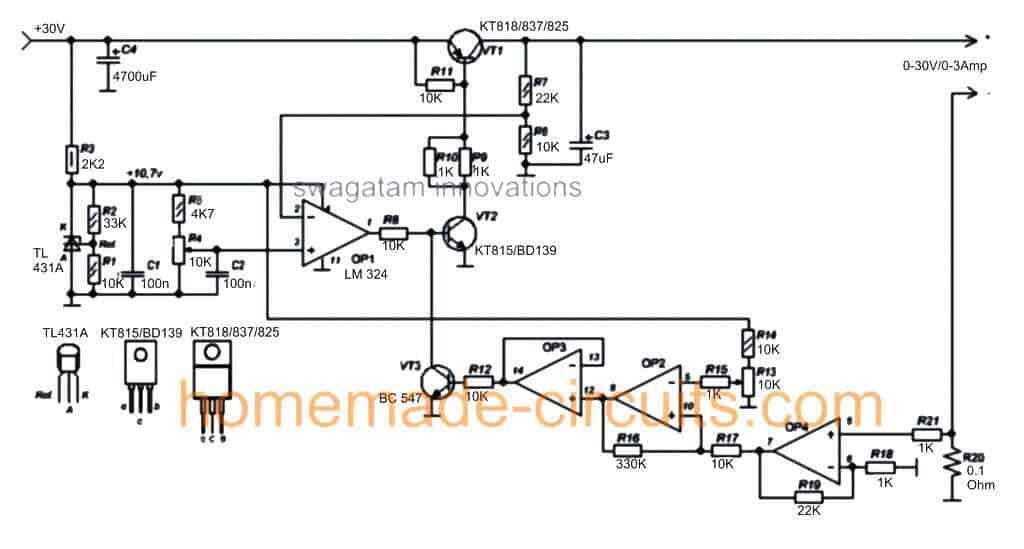
Piirikaavio

Yllä oleva kuva esittää piirin yksinkertaisen asettelun, joka ilmeisesti ei sisällä muuta kuin itse IC: tä.
Eri pinoutit allokoidaan tiettyjen toimintojen suorittamiseen, kuten moottorin PWM-nopeuden säätö, suuntasäätö jne. Yksinkertaisesti syöttämällä asiaankuuluvia pinouteja määritetyillä tiedoilla ulkoisesta lähteestä.
Seuraava kuva näyttää sirun paketin, joka näyttää 10-nastaiselta DIL-IC: ltä, sen erilaisia pinout-toimintoja voidaan tutkia kaavion alla olevista tiedoista:

Viitataan ehdotetun anturiton BLDC-ohjainpiirin piirikaavioon kuten edellisessä artikkelissa ja myös yllä olevassa sirukuvassa on esitetty, pinouts-yksityiskohdat voidaan ymmärtää seuraavasti:
IC Pinoutin tiedot
FG = Se on moottorin nopeuden osoittimen tappi (lähtö), joka on kiinnitetty avoimessa kollektorimoodissa sisäisen BJT: n kanssa.
Avoin keräin tarkoittaa, että tämän pinoutin lähtö tuottaa negatiiviset PWM: t uppoavan logiikan kautta avoimen kollektorin ja maan yli, jotta pätevä lukema saadaan, käyttäjän on kytkettävä vetovastus tämän avoimen kollektorin ja positiivisen virran (5V) yli ) nopeuden osoittamisen suorittamiseksi tällä pinoutilla.
FGS = Se on nopeuden ilmaisimen valitsimen tulo, eli tässä voidaan käyttää logiikkaa korkea tai matala, kun merkkivalo FG kytketään päälle / pois päältä.
Vcc = positiivinen syöttö mikropiirille sen toiminnan mahdollistamiseksi ei saa olla yli 5 V.
W, U ja V ovat 3-vaiheisia lähtöjä BLDC-moottorille, jonka oletetaan toimivan tämän piirin kautta. Tämä toimii myös kuin tulot moottorin EMF-pulssien tunnistamiseksi vaaditulle synkronoidulle moottorikelojen kytkennälle.
GND = viittaa IC: n negatiiviseen syöttöpiiriin Vdd-nastan suhteen.
FR = Auttaa valitsemaan tai ohjaamaan moottorin suuntaa ja sitä voidaan muuttaa dynaamisesti milloin tahansa, kun järjestelmään on kytketty virta, yksinkertaisesti tuomalla ulkoinen logiikka korkea tai logiikka matala.
PWM = Se tarkoittaa PWM-ohjaustuloa ulkoinen PWM-aaltomuodon generaattori.
Tämä PWM-tulo voi vaihdella yhdistetyn BLDC-moottorin halutun nopeuden ohjauksen toteuttamiseksi.
Sirun keskellä oleva katkoviiva osoittaa lämpöalustan, joka voidaan kiinnittää tai painaa jäähdytyselementillä mahdollisen lämmöntuotannon upottamiseksi sirulle samalla kun sitä käytetään kuormitetun BLDC-moottorin kanssa.
Yllä olevassa keskustelussa ilmaistaan anturittoman BLDC-moottoriohjaimen sirun DRV10963 pinout tai yhteyden yksityiskohdat, nyt analysoidaan sirun sisäinen kokoonpano ja toiminta seuraavien kohtien avulla:
Laitteen kuvaus
DRV10963 on 3-vaiheinen anturiton sähkömoottorin käyttäjä, jolla on sisäänrakennetut MOSFET-virtalähteet (3-vaiheiset H-silloitetut). Se on räätälöity korkeammalle tuottavuudelle, vähemmälle melulle ja minimaaliselle toissijaiselle materiaalimäärälle. Ainutlaatuinen sensoriton ikkuna-Iess 180 ° -muotoinen sinimuotoinen hallintajärjestelmä tarjoaa meluttoman moottorin työmatkan tehokkuuden.
DRV10963 koostuu älykkäästä lukituksen tunnistustoiminnosta, joka on yhdistetty sisäänrakennettuihin suojapiireihin turvallisen suorituskyvyn saavuttamiseksi. DRV10963 löytyy lämpötehokkaasta 10-napaisesta USON-pakkauksesta, jossa on peittämätön lämpömatto.
Kuinka IC toimii
DRV10963 -tuote on 3-vaiheinen anturiton moottorioperaattori, jolla on infusoidut MOSFET-laitteet
luotu erityisesti erinomaiselle suorituskyvylle, pienemmälle resonanssille ja pienimmälle osamääräiselle moottorikäyttötoiminnolle.
Pääanturi, jossa ei ole ikkunoita, 180 °: n sinimuotoinen ohjaussuunnitelma tuottaa äänettömän moottorin toiminnan ylläpitämällä sähköisesti stimuloitua vääntömomenttia Alustamisen jälkeen DRV10963-laite aikoo kääntää moottoria FR-tulotapin kautta määritetyllä kurssilla.
DRV10963-siru toimii 3-vaiheisella BLDC-moottorilla sinimuotoisen ohjaussuunnitelman avulla.
Käytettyjen sinimuotoisten vaihejännitteiden merkitys riippuu PWM-nastan toimintajaksosta. Kun moottori liikkuu, DRV10963 IC toimittaa nopeustiedot FG-nastassa.
DRV10963-yksikkö koostuu älykkäästä lukitustunnistuskyvystä. Tällaisessa tilanteessa, jossa moottoria pysäyttää ulkopuolinen paine, ohjelma aikoo tunnistaa lukitusongelman ja ryhtyy toimenpiteisiin turvaamaan yksin moottorin kanssa.
Lukitustunnistinpiirin erityinen menettely on kuvattu yksityiskohtaisesti lukituksen tunnistuksessa. DRV10963 IC sisältää lisäksi useita sisäänrakennettuja turvapiirejä, esimerkiksi ylivirtasuojaa, ylijännitesuojaa, jännitesuojausta ja ylilämpötilasuojausta.
Tyypillinen selitys
Nopeuden syöttö ja ohjaus
DRV10963 esittelee 3-vaiheisia 25-kl-lz PWM -ulostuloja, joissa voi olla vakio prosenttiosuus sinimuotoisia aaltomuotoja vaiheesta toiseen. Jos mikä tahansa sykli määritetään suhteessa maahan, havaittu aaltomuoto on todennäköisesti PWM-suojattu sinimuotoinen yhdistettynä kolmannen asteen yliaaltojen kanssa, kuten kuvassa 2 on esitetty.

Tämä koodausstrategia virtaviivaistaa ohjaimen spesifikaatiot siitä syystä, että todennäköisesti on usein yksi vaihelähtö, joka voisi olla nollatasoinen.
Tuloksen amplitudi vaihtelee syöttöjännitteen (VCC) ja valtuutetun PWM-työjakson (PWM) mukaan, kuten yhtälössä 1 on määritelty ja korostettu kuvassa 3. Optimaalinen amplitudi toteutetaan, kun ohjattu PWM-työjakso on 100 PERCENT.
Vphpk = PWMdc>

Moottorin nopeutta ei säännellä suoraan käyttämällä PWM-järjestystä moottorille sattuvien vaihejännitteiden amplitudin säätämiseksi.
PWM-tulon toimintajakso muunnetaan 9-bittiseksi digitaaliseksi suuruudeksi (0-511).
Säätötarkkuus on 1/512 == 0,2%. Toimintajakson analysaattori helpottaa alkutilausten vaihtoa syöttötyösyklin ja 9 bitin digitaalisen kuvan välillä.
Tämä on korostettu kuvassa 4, jossa r = 80 ms.

Vaihtoteho PWM: n tilatun työjakson ja lähdön maksimiamplitudin välillä vaihtelee DRV10963-laitteessa.
Tuloksen maksimiamplitudia käsitellään yhtälössä 1, kun PWM-komento> pienin toimiva käyttöjakso. Pienin käyttösykli määritetään usein 13%, 10%, 5% tai ei rajoitusta OTP-asetuksella (MINOP_DC1: 0).
Taulukossa 1 on esitetty suositellut kokoonpanot minimikäyttöjaksolle.
Aina kun PWM: n ohjeistama käyttöjakso on pienempi kuin alin toimiva käyttöjakso ja yli 1,5%, lähtöä säädellään pienimmällä toimintajaksolla. Aina kun syöttöjakso on alle 1,5%, DRV10963-laite ei todennäköisesti suorita lähtöä ja se lähetetään valmiustilaan.
Tämä voidaan havainnollistaa kuvassa 6.

Kiertoasetukset
DRV10963 käynnistää moottorin tekniikalla, joka on yksityiskohtaisesti kuvattu kuvassa 7.

Moottorin alustuskäyrä koostuu laitteen konfiguroitavista vaihtoehdoista avoimen silmukan sulkemissilmukan vaihtorajaan (HOW.), Linjausaikaan (TAHQH) ja kiihdytysnopeuteen (RACE).
Roottorin sijoittamiseksi kommutointilogiikkaan DRV10963 suorittaa x%: n käyttöjakson vaiheille V ja W samalla ohjaamalla vaihetta U GND: llä.
Tämä skenaario jatkuu TAIign-sekuntien ajan. X%: n merkitsevyys tunnistetaan VCC-jännitteellä (kuten taulukossa 2 on esitetty) pitämään yllä suurta pyörimismomenttia eri syöttöjännitteillä.
Kun kohdistussekvenssi toteutuu, moottori pakotetaan kiihtymään asettamalla sinimuotoiset vaihejännitteet huipputasoilla, kuten taulukossa 2 on esitetty, ja lisäämällä kommutointialueen avulla RACE: n esittämällä laajenemisnopeudella, kunnes kommutointitaso kasvaa Hom: ksi ., Hz.
Heti kun tämä raja on saavutettu, DRV’l0963 muuntuu suljetun silmukan tilaan, jolloin sisäänrakennettu ohjausalgoritmi tunnistaa kommutointikäytön etenemisen, kun taas käytetyn jännitteen tunnistaa PWM: n valtuuttama käyttöjaksotulo.
Avoimen silmukan sulkemispiirin vaihtoraja (Hom), kohdistusaika (TAHQH) ja kiihdytysnopeus (RACE) voidaan konfiguroida OTP-kokoonpanojen avulla.
Kanavanvaihtokynnyksen (HOW) valinta hyväksytään tyypillisesti kokeiden ja virheiden arvioinnilla. Tavoitteena olisi suosia kanavanvaihtotoleranssia, joka voi olla mahdollisimman vähän mahdollista ja jonka avulla moottori voi vaihtaa vaivattomasti ja uskollisesti avoimen silmukan kiihdytyksen ja suljetun piirin kiihdytyksen välillä.
Yleensä lisääntyneet nopeusmoottorit (maksiminopeus) edellyttävät ylivoimaista kanavanvaihtotoleranssia johtuen siitä, että korkean nopeuden moottorit käsittävät alennetun Kt: n, joten edullisempi BEMF.
Taulukossa 3 on esitetty kanavanvaihdon toleranssin konfiguroitavat asetukset. Suurin nopeus sähköisessä Hz: ssä on osoitettu viitteeksi, joka auttaa valitsemaan halutun kanavanvaihtonopeuden tiettyä lähetystä varten.

Kohdistusajan (TAHQH) ja kiihdytysnopeuden (RACE) valinta voi olla jopa riippuvainen kokeiden ja virheiden tutkimuksesta.
Suuremman inertian omaavat moottorit vaativat tavallisesti pidemmän kohdistusajan ja hitaamman nopeuden, toisin kuin matalalla inertialla varustetut moottorit, jotka yleensä vaativat lyhyemmän kohdistusajan yhdessä nopeamman kiihdytysprosentin kanssa. Ohjelman kompromisseja on toteutettava käynnistysvakauden hyödyntämiseksi toisinpäin vuorottelujakson sijaan.
TI kannattaa aloittamista päättämällä vähemmän intensiivisistä kokoonpanoista (hitaampi RACE ja merkittävä Tmign) kompromissiin vääntömomentin nousuaikaa tukemaan maksimaalista täyttymisnopeutta.
Heti kun laitteen on varmistettu toimivan tunnollisesti, ylimääräisiä voimakkaita kokoonpanoja (suurempi RACC ja pienempi TAHQH) voidaan käyttää vähentämään kääntymishetkeä ja samalla varovasti seuraamaan täyttymisastetta.
Taulukossa 4 on TA'g: n ja RACE: n konfiguroitavat asetukset.

Loppuosa tämän anturittoman BLDC-IC: n selityksestä on esitetty tässä alkuperäisessä tietolomakkeessa
Kommentoi rohkeasti, jos haluat tietää enemmän yllä mainituista sensoriton BLDC-moottorin ohjainpiirin yksityiskohdista
Pari: 12V LED reppu virtalähde piiri Seuraava: Quadcopter-kaukosäädinpiiri ilman MCU: ta