Johdanto robotteihin
Robotti on kone, joka näyttää ihmisiltä. Se on ohjelmoitu tekemään jotain. Sana Robot on peräisin slaavilaisesta sanasta robota (tarkoittaa pakkotyöläistä). Robotti on kehitetty 1960-luvulla, robotit on valmistettu metalleista ja muiden elementtien sekoittimesta. Robotit vain komentavat ja mitä ihmiset sanovat. Kolmekymmentä vuotta sitten robotit olivat jotain tieteiskirjallisuuselokuvassa. Mutta tänään robotiikkaa käytetään monilla alueilla. Ja se on erittäin tärkeää ihmiskunnan tulevaisuudelle. robottitekniikat parantavat maanpuolustusta, terveydenhuoltoa, valmistusta, kotimaan turvallisuutta, koulutusta, kulutustavaroita ja monia eri aloja. Jo lääkärit käyttävät robotiikkaa erityisleikkauksissa. Robotit ovat tärkeitä, koska ne suorittavat tehtäviä, jotka ovat vaarallisia ja mahdottomia myös ihmisille.
5 syytä miksi robotit ovat olleet suosittuja
- Nopeus
- Vaaralliset ympäristöt
- Toistuvat tehtävät
- Tehokkuus
- Tarkkuus
Nopeus:
Robotteja voidaan käyttää, koska ne suorittavat tehtäviä nopeammin kuin ihmiset. Robotti on todella mekanismi, jota tietokone ohjaa. Tiedämme, että tietokoneet voivat tehdä laskutoimituksia ja käsitellä tietoja nopeasti verrattaessa ihmisiin. Jotkut robotit liikkuvat nopeammin suorittamaan tehtävän, kuten esineiden noutamisen ja asettamisen, nopeammin kuin ihminen.
Vaaralliset ympäristöt:
Robotteja voidaan käyttää vaarallisessa ympäristössä, koska ne voivat toimia paikassa, jossa ihminen olisi vaarassa. Esimerkiksi robotti voidaan suunnitella kestämään enemmän lämpöä, säteilyä, kemiallisia höyryjä kuin ihmiset pystyisivät.
Toistuvat tehtävät:
Joskus robotit eivät todellakaan ole paljon nopeammin kuin ihmiset, mutta ne ovat hyviä yksinkertaisesti tekemään samaa työtä uudestaan ja uudestaan. Tämä on robotille helppoa, koska kun robotti on ohjelmoitu tekemään työ kerran, sama ohjelma voi suorittaa useita kertoja työn suorittamiseksi monta kertaa. Ja robotti ei kyllästy kuin ihminen.
Tehokkuus:
Tehokkuudella on kyse tehtävien suorittamisesta ilman jätettä. Tämä tarkoittaa
- Ei tuhlaa aikaa
- Ei tuhlaa materiaaleja
- Ei tuhlaa energiaa
Tarkkuus:
Tarkkuudella on kyse tehtävien suorittamisesta hyvin tarkasti. Tuotteita valmistavassa tehtaassa kukin esine on valmistettava identtisesti. Kun esineitä kootaan, robotti voi sijoittaa osia millimetrin murto-osassa.
Robotin hallinta
Perusrobotti tai robottijärjestelmä koostuu jäykästä rungosta, johon mahtuu robotin koko piiri. Piiri koostuu antureista, jotka havaitsevat kaikki muutokset ympäristössä ja syöttävät nämä tiedot ohjausyksikköön.
Anturien tulojen perusteella ohjausyksikkö ohjaa vastaavasti toimilaitteita. Siten robotin suurin toiminta on ohjausyksiköllä. Joissakin sovelluksissa robotti on täysin automaattinen, ts. Ohjaus on itse laitteessa ja jonkin anturiyksikön perusteella ohjaimia ohjataan toimilaitteita automaattisesti. Joissakin sovelluksissa robottia ohjataan manuaalisesti.
Katsotaanpa kahta tapaa hallita robottia manuaalisesti
- Matkapuhelimen käyttö
- TV-kaukosäätimen käyttäminen
Matkapuhelinohjattu robottiajoneuvo:
Kun puhumme langattomat robotti-ajoneuvot , ajattelemme yleensä RF-tekniikan piirejä. Mutta tämä projekti on hyvin erilainen. Se käyttää matkapuhelinta robotin ajoneuvon liikkeen hallintaan. Tässä olemme käyttäneet DTMF-tekniikkaa robotti-ajoneuvon ohjaamiseen matkapuhelimen avulla. Käytimme kahta matkapuhelinta, yksi on kytketty robottiin ja toinen on käyttäjän puhelin. Yhteys muodostuu näiden kahden matkapuhelimen välillä, ja jos jotain näppäintä painetaan, kyseinen ääni kuuluu solun toiseen päähän. Tätä ääntä kutsutaan DTMF (dual tone multi frequency) -ääneksi.

Matkapuhelinohjattu robottiajoneuvo

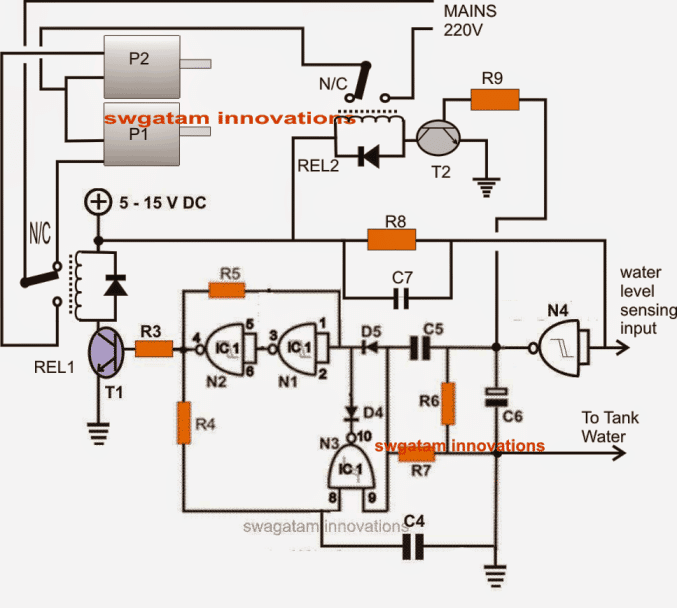
Matkapuhelinohjattu robottiajoneuvojen piirikaavio
Tämä projekti on suunniteltu kehittämään robotti ajoneuvo jota matkapuhelin ohjaa. Tämä perustuu 8051-mikrokontrolleriin. Kaksi matkapuhelin ohjaa robottia vaatimusten mukaisesti. Yksi matkapuhelin on kytketty robottiin ja toinen on käyttäjän solu. Kun käyttäjän matkapuhelimessa painettu avain tuottaa vastaavan äänen, se vastaanotetaan toisessa solussa. Mikrokontrolleri käsittelee vastaanotetun äänen DTMF-dekooderin avulla. Dekooderi dekoodaa DTMF-äänen binääriluvuiksi ja nämä binäärikoodatut tiedot lähetetään mikrokontrollerille. Matkapuhelimen tulon perusteella mikro-ohjain antaa vastaavasti moottorin kuljettajalle oikeat signaalit kunkin moottorin pyörittämiseksi haluttuun suuntaan. Esimerkiksi kun painetaan tiettyä numeroa käyttäjän matkapuhelimessa, puhelu soitetaan automaattisesti järjestelmän matkapuhelimeen. Matkapuhelinjärjestelmä on kytketty DTMF-dekooderiin, joka dekoodaa vastaavasti äänen ja moottoria pyöritetään painettua lukua vastaavaan suuntaan.
IR-ohjattu robottiajoneuvo:
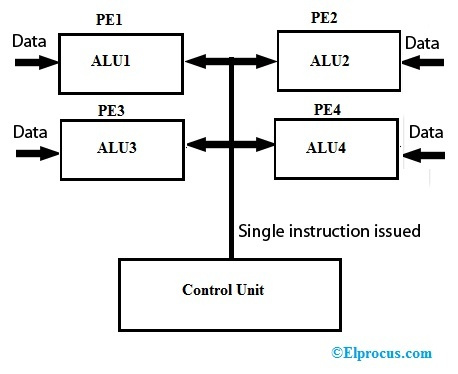
Tässä järjestelmässä lähinnä robotti-ajoneuvoa ohjataan television kaukosäätimellä. Infrapuna-anturi (IR) on liitetty robotin ohjausyksikköön etäsignaalin havaitsemiseksi. Nämä tiedot välitetään ohjausyksikölle, joka liikuttaa robottia vaatimusten mukaisesti. Mikrokontrolleria käytetään ohjausjärjestelmänä.
Tässä infrapunakaukosäätimessä käytetään lähetintä. Piste, kun painiketta painetaan kaukosäätimessä, signaali kulkee ja saa IR-vastaanottimen. Tämä merkki lähetetään mikrokontrollerille, joka purkaa signaalin ja suorittaa siihen liittyvän liikkeen kaukosäätimessä painetun painikkeen mukaisesti. Esimerkiksi, jos numeroa 1 painetaan kauko-ohjaimessa, robotti käännetään vasemmalle vaatimuksemme mukaisesti. Muut yritystesti (eteenpäin, taaksepäin ja oikealle) suoritetaan vertailevalla tavalla IR: ää hyödyntäen. Vastaanottopäässä kehitys saavutetaan kahdella moottorilla, jotka on liitetty mikrokontrolleriin.
Ohjelma on kirjoitettu, ts. Suorituksen aikana se lähettää komentoja moottoriohjaimen IC: lle sen vaatimuksen mukaisesti, että moottoria käytetään robotin liikkumista varten, kuten edellä on selitetty.

IR-ohjattu robottiajoneuvolohkokaavio
Jos epäilet tätä artikkelia, jätä kommentti. Ja haluaisin tietää lisää tähän liittyviä sovelluksia ja menetelmiä?