Viestissä käsitellään yksinkertaista RC-helikopterin kaukosäätöpiiriä, joka käyttää 433 kHz: n RF-moduuleja ilman mikro-ohjainta tai monimutkaisia joystick-toteutuksia.
Idean pyysi herra Jitendra.
Piirin tavoitteet ja vaatimukset
- Teen suuren mittakaavan RC-helikopteria. Jossa käytän 4 moottoria. Ensimmäiselle 12 V: n päämoottorille: mekanismi on, että haluan, että sen nopeutta ohjataan kaukosäätimen ohjainavaimella, 0: sta täydelle nopeudelle.
- Toisille 3v-moottoreille: sen mekanismi on tarkoitettu vain eteen- ja taaksepäin pyörimiseen kummankin moottorin kaukosäätimen erillisellä avaimella, koska se käyttää roottoreiden pyyhkäisylevyjä.
- Kolmannelle 9v-takamoottorille: se tulisi asettaa tasapainonopeudelle helikopterin vastaanottolevyn säätimellä, jotta voisin säätää nopeutta manuaalisesti pysäyttääkseen helikopterin .. pyörimästä roottoreiden mukana, ja kaukosäädin olisi hidastaa ja nopeuttaa moottoria tasapainostaan.
- Vastaanottokortin tuloteho olisi 12v ja virta 8-10 ampeeria. Sen tulisi olla 500–800 metrin kantama. Sir, voisitteko suunnitella tällaisen RC-piirilevyn yhdessä kaukosäätimen kanssa.
- Olen etsinyt tällaista piirilevyä kahden viime vuoden ajan.
- Projektini lopetettiin sen puuttuessa. Sir auttakaa minua. Mukavuutesi vuoksi voit suunnitella kaksi erillistä rc-piirilevyä, yhden päämoottorille ja takamoottorille ja toisen kahdelle eteen- ja taaksepäin pyörivälle moottorille.
- Mutta molempien piirien tulovirran ja potentiaalieron tulisi olla samat, samalla etäisyydellä, joka on 500-800 metriä kaukosäätimien tai kaukosäätimen kanssa. Mainitse myös tarvittavien komponenttien nimi ja numerointi.
Muotoilu
Pyydetyt piirimoduulit, joita tarvitaan ehdotetun RC-helikopterin rakentamiseen, ovat:
1) 12 V: n PWM-nopeussäädin
2) 3 V: n moottorin taaksepäin ohjaimen piiri.
3) 9 V: n moottorin säädin, jossa nopeuden säätöpiiri.
Kaikkia yllä olevia määrityksiä on ohjattava pitkällä 433 MHz: n taajuudella RF-kaukosäädinmoduuli .
Haluttu 433 MHz: n RF-etämoduuli voidaan hankkia mistä tahansa verkkokaupasta tai lähimmältä sähköiseltä jälleenmyyjältä. Kaukosäätimen kantaman tulisi olla RC-helikopterialueen vaadittujen spesifikaatioiden mukainen, tässä sen oletetaan olevan 1 km: n sisällä.
Esiteltyyn RC-helikopterin kaukosäätöpiiriin vaaditaan 6-kanavainen RF-kaukomoduuli, täsmälleen samanlainen kuin aiemmin yksinkertaisin drone-kaukosäädinpiiri .
Saman kuvan voi nähdä alla:

Vasemmanpuoleinen vihreä levy on etävastaanotinmoduuli, jossa on kuusi ohjausreleä, ja tämä yksikkö on asennettava RC-helikopterin sisään tarvittavia ohjaustoimia varten.
Oikeanpuoleinen yksikkö on lähetinluuri, jonka oletetaan olevan käyttäjän hallussa, ja asiaankuuluvia painikkeita painetaan relekortin komentamiseksi vastaavalla liikkeenohjaustiedolla.
Seuraavista yksityiskohdista näet nyt, kuinka kuusi releä on määritettävä eri PWM-piireillä ja asennettava RC-hakkuriin:
Muista, että vastaanottimessa näkyvät relekontaktit ovat oletusarvoisesti tyhjät, mikä tarkoittaa, että niiden N / C- ja N / O-koskettimia ei ole kytketty ja ne on kytkettävä seuraavissa kaavioissa esitetyllä tavalla.
Pyynnön mukaan 9 V: n moottoria ja 12 V: n moottorin nopeuksia on ohjattava seuraavalla kauko-ohjaimen painalluksella. Piirit tämän toiminnon toteuttamiseksi on esitetty alla:
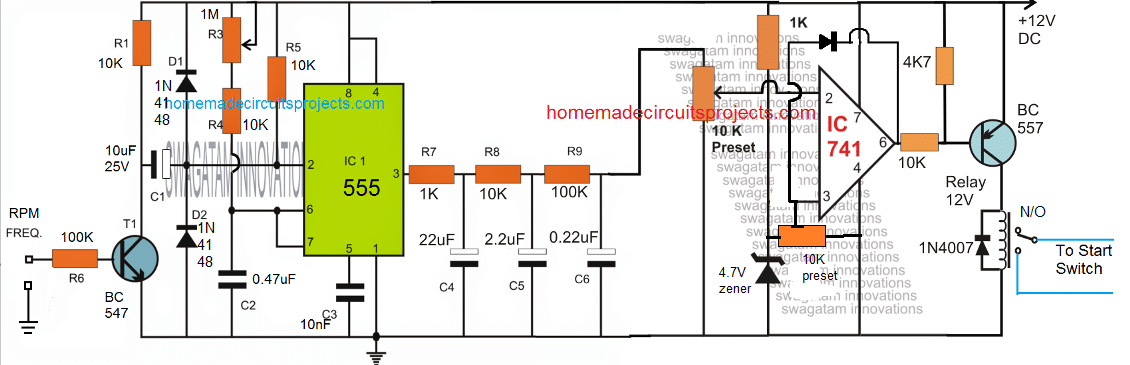
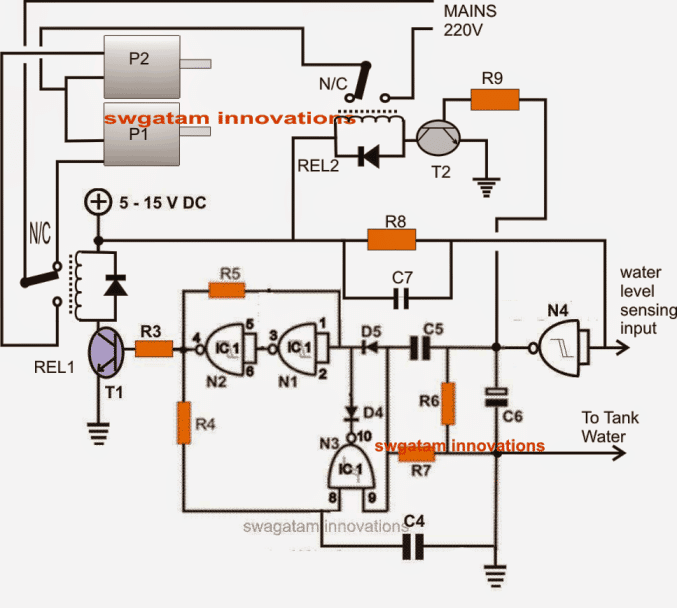
Moottoriohjaimen kaavio


Piirin käyttö
Kuten kaaviosta voidaan nähdä, pari samanlaista IC 555 PWM -piirit käytetään tätä tarkoitusta varten. Neljä kuudesta releestä on kytketty tähän asiaankuuluvilla koskettimilla johdotettuina esitettyjen yhteyksien yli.
Suunnittelussa IC 555 on kiinnitetty vakaana peruspiirinä, osoitettu värähtelemään tietyllä taajuudella riippuen sen R1-, R2- ja C-komponenttiarvoista .
Jännitteen seuraaja IC 741: n muodossa on konfiguroitu IC 555: n ohjaustapilla # 5 PWM-sisällön muuttamiseksi IC 555: n nastassa # 3 ilmoitettujen releoperaatioiden mukaisesti.
Jännitettä IC 741: n nastassa # 3 seurataan tai siirretään nastalla # 6 ja sen jälkeen IC: n nastalle # 5. Nastan nro 3 kondensaattorin varaustasosta riippuen tämä vaihteleva jännite voi olla missä tahansa syöttöjännitteen rajan ja nolla.
Kondensaattorin varaustasoa muutetaan tai muutetaan yksinkertaisesti lataamalla se tai purkamalla asiaankuuluvan relekontaktin aktivoinnin kautta. Ylemmän releen koskettimen lataaminen on suljettu tai aktivoitu, mikä mahdollistaa nousevan jännitteen IC 555: n nastassa # 5, kun taas alempien releen koskettimien aktivointi purkautuu kondensaattorista, jolloin IC 555: n nastalle # 5 ilmestyy suhteellisesti pienempi jännite.
Edellä mainitut toimet kääntävät tapin # 3 tulokset vastaavasti vaihteleviksi PWM :eiksi, mikä puolestaan saa moottorin käymään joko nopeammin tai hitaammin.
9 V: n moottorista näkyy sarja diodeja kiinnitettynä kuljettajan transistorin emitteriin, mikä varmistaa tarvittavan jännitteen pudotuksen ja auttaa muuttamaan 12 V: n likimääräiseksi 10 V: n säädetyksi virtalähteeksi moottorin eritelmien mukaisesti.
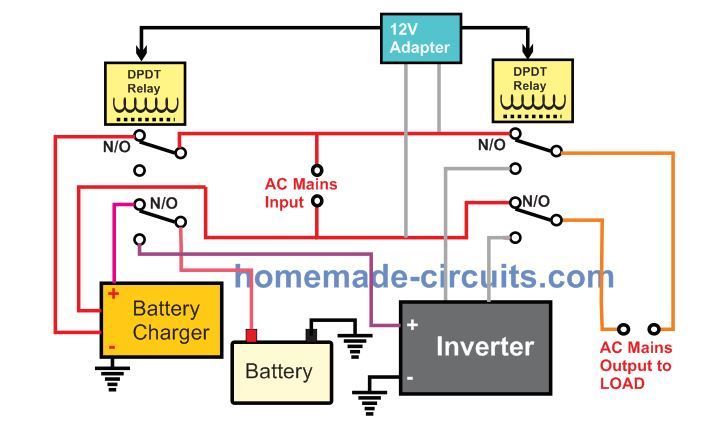
3 V moottorin peruutus eteenpäin
Kolmas ja viimeinen pyyntö pyynnössä koskee taaksepäin / eteenpäin ohjaus 3 V moottorin RF-lähettimen luurin painikkeella.
Kaksi muuta releä voidaan nyt käyttää tähän tiettyyn suoritukseen, ja se tehdään seuraavan kaavion mukaisesti:

Tässä myös käytämme monipuolista johdotettua IC 555: tä tarkana PWM-generaattoripiirinä. PWM asetetaan asianmukaisesti 5K-esiasetuksella ennen asennusten viimeistelyä siten, että moottorin nopeus säädetään täydellisesti helikopterin vaadittuun tasapainoon.
Releet voidaan nähdä yksinkertaisesti johdotettuna vaaditun taaksepäin- ja eteenpäin-taaksepäin tai myötä- tai vastapäivään tapahtuvalle moottorin liikkeelle vasteena pariliitetyn relekontaktin vaihtumiselle, jotka yhdessä muodostavat DPDT-releen.
Oikosulun estämiseksi on suositeltavaa, että vastaanotinmoduulia modifioidaan näille kahdelle releelle siten, että jommankumman painikkeen painaminen saa molemmat releet aktivoitumaan yhdessä melko ruskeaksi riippuen siitä, mitä kahta kytkintä painetaan tahdistettuna aktivointia varten.
Tämän vaihtamisen voidaan odottaa kääntävän moottorin pyörimisen vastakkaiseen suuntaan, jolloin käyttäjä voi suorittaa tarvittavat suuntamuutokset RC-helikopterikoneessa.
Tämä päättää ehdotetun RC-helikopterin kaukosäätöpiirin piiri- ja relejohdotusohjeet. Jos haluat epäillä muita epäilyksiä, älä epäröi ilmaista niitä kommenttisi kautta.
Pari: Ultraääni Älykäs automaattinen virtakytkin Seuraava: Yksi MOSFET-luokan A tehovahvistinpiiri