Tässä viestissä aiomme tutkia PIR- tai Pyroelectric Infrared Radial Sensor HC-SR501 -taulukkoa. Ymmärrämme mihin tarkoitukseen PIR-anturia käytetään? Sen perustoiminnot, nastaliitännät, tekniset tiedot ja lopuksi tarkastelemme joitain tosielämän sovelluksia.
Aloitamme ymmärtämällä todelliset PIR-anturiyksiköt, jotka on asennettu sisälle vakiona PIR-moduulit ja oppia sen sisäiset ominaisuudet, kiinnitystiedot ja sisäiset työskentely yksityiskohdat.

Mikä on PIR-anturi?
PIR tarkoittaa pyroelectic Infrared Radial Sensor tai Passive Infrared Sensor. PIR on elektroninen anturi, joka havaitsee infrapunavalon muutokset tietyllä etäisyydellä ja antaa ulostulossaan sähköisen signaalin vasteena havaittuun infrapunasignaaliin. Se pystyy havaitsemaan kaikki infrapunaa lähettävät kohteet, kuten ihmiset tai eläimet, jos se on anturin kantama tai liikkuu etäisyydeltä tai liikkuu anturin kantaman sisällä.
PIR-anturimoduuli voidaan jakaa kahteen osaan infrapunaherkälle kiteelle ja prosessointipiirille.
Kuva PIR-herkkistä kristalleista:

Pimeässä osassa metallia, johon infrapunaherkkä kide on sijoitettu, herkkä kide voi havaita infrapunatason ympäristössä. Siinä on oikeastaan kaksi pyroelektristä anturia liikkuvien esineiden havaitsemiseksi. Jos yksi herkistä kiteistä havaitsee infrapunamuutoksen (lisäys tai vähennys) kuin toinen herkkä kide, lähtö laukaistaan.
Tämän herkkän kiteen päälle asetetaan yleensä kupolin muotoinen muovirakenne, joka toimii linssinä fokusoiden infrapunavaloa antureihin.
Kuinka PIR toimii
Pyrosähköisen infrapuna-anturin tunnistustoiminta perustuu omaisuuteen tai ominaisuuteen, josta tulee vastuu materiaalin polarisaation muuttamisesta lämpötilan muutosten seurauksena.
Nämä anturit käyttävät kaksoisanturia tai paria anturielementtejä infrapunasignaalien havaitsemiseksi kahdessa vaiheessa, mikä varmistaa huijauskestävän tunnistuksen peruuttamalla ei-toivotut lämpötilan vaihtelut nykyisessä EMI-vaiheessa. Tämä kaksivaiheinen tunnistusprosessi parantaa anturin yleistä vakautta ja auttaa havaitsemaan infrapunasignaalit vain ihmisen läsnäolosta.
Kun ihminen tai asiaankuuluva infrapunalähde liikkuu PIR-anturin ohi, säteily leikkautuu tunnistuselementtien pariin vuorotellen laukaisemalla lähdön muodostamaan pari ON / OFF- tai korkeaa ja matalaa pulssiä, kuten kuvassa seuraava aaltomuoto:

Seuraava karkea Gif-simulaatio osoittaa, kuinka PIR-anturi reagoi liikkuvaan ihmiseen ja kehittää pari lyhyttä terävää pulssia lähtöjohtimiensa yli tarvittavaa prosessointia varten tai laukaisee asianmukaisesti konfiguroidun releportaan

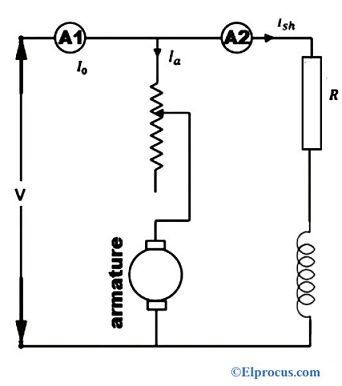
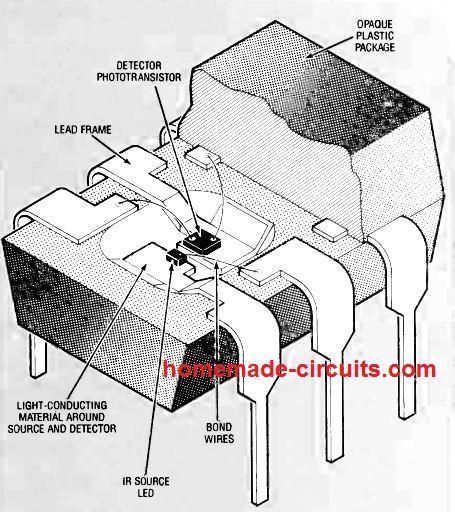
PIR: n sisäinen asettelu
Seuraava kuva esittää tavallisen PIR-anturin sisäisen asettelun tai kokoonpanon.

Vasemmalla näet parin infrapunatunnistuselementtejä, jotka on kytketty sarjaan. Tämän sarjan yläpää on kytketty sisäänrakennetun FET: n porttiin, joka toimii pienenä IR-signaalin vahvistimena. Rg-alasvetovastus tarjoaa vaaditun valmiustilan nollalogiikan FET: lle varmistaakseen, että se pysyy täysin kytkettynä pois päältä ilman IR-signaalia.
Kun havaitseva elementtipari havaitsee liikkuvan infrapunasignaalin, se muodostaa vastaavan parin korkea- ja matalalogiikkasignaaleja, kuten yllä on käsitelty:
FET vahvistaa nämä pulssit asianmukaisesti ja replikoituu sen lähtötietoon jatkokäsittelyä varten liitetyllä piirillä.
Liittyvät EMI-vaiheet yhdessä kondensaattorin kanssa tuottavat ylimääräistä suodatusta prosessille puhtaan pulssisarjan tuottamiseksi PIR: n osoitetulle ulostulotapille.
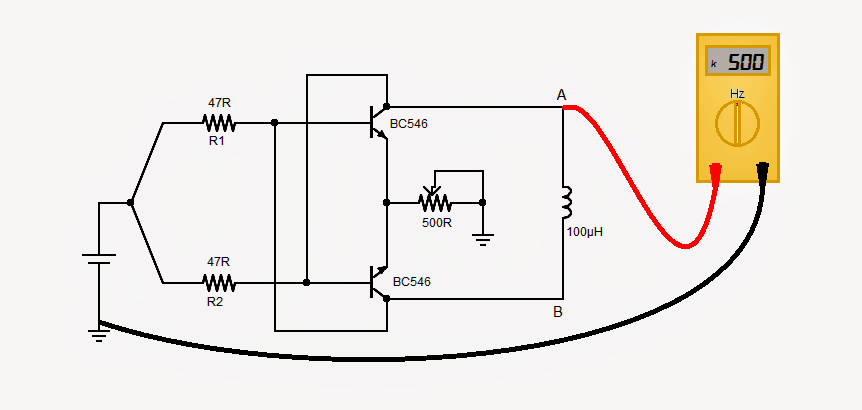
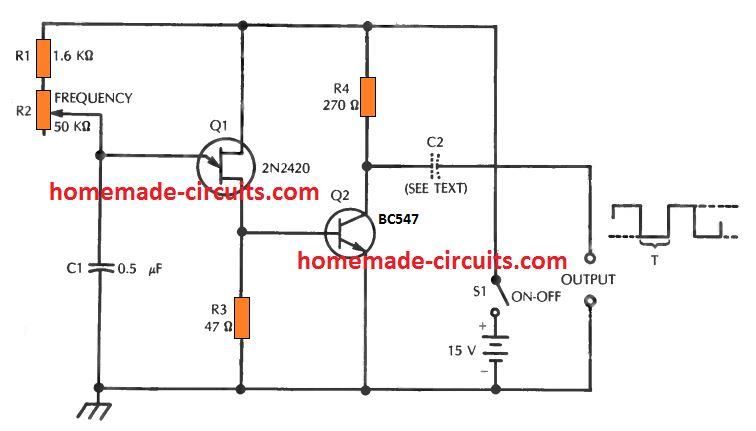
PIR-anturin käyttöönoton testaus
Seuraava kuva esittää tavallisen PIR-anturitestin. PIR: n lähtö- ja Vss-nastat (negatiivinen tappi) on kytketty ulkoiseen alasvetovastukseen, Vdd-nasta toimitetaan 5 V: n virtalähteellä.

Paperitavaran musta runko tuottaa tarvittavan ekvivalentin infrapunasäteilyn PIR-anturille hakkurimekanismin kautta. Hakkurilevy leikkaa vuorotellen IR-signaalit, jotka jäljittelevät liikkuvaa IR-kohdetta.
Tämä hienonnettu infrapunasignaali osuu PIR-anturiin ja tuottaa määritellyt pulssit ulostulotapinsa yli, joka vahvistetaan sopivasti opampin kautta laajuuden analysointia varten.
Yllä olevan kokoonpanon ihanteelliset testiolosuhteet näkyvät alla:

Sensing Element -lähdön tasapainottaminen
Koska PIR-laitteissa käytetään kaksoisanturimekanismia, on tarpeen varmistaa, että linssiparin kautta tapahtuva käsittely on tasapainossa.
Anturielementit testataan ja konfiguroidaan asianmukaisesti arvioimalla vastaava yksittäisen signaalin lähtöjännite (SSOV) seuraavan kaavan avulla:
Vaaka: | Va - Vb | / (Va + Vb) x 100%
Missä, Va = puolen A herkkyys (mV-huipusta huippuun)
Vb = herkkyyspuoli B (mV huipusta huippuun)
Tärkeimmät tekniset tiedot
PIR-anturin tärkeimmät tekniset tiedot ja mittaparametrit voidaan oppia seuraavista yksityiskohdista:

PIR-sisäyksiköiden käyttö
Tänään löydät PIR-moduulit, joissa on erikoistunut käsittelypiiri ja linssi integroitu PIR-anturi. Tämä parantaa PIR: n suorituskykyä monta kertaa ja antaa loppukäyttäjälle mahdollisuuden saada tarkasti määritelty optimoitu, vahvistettu lähtö moduulista.
Tämä lähtö on nyt konfiguroitava vain releportaalla vaaditulle kuorman ON / OFF-kytkimelle vastauksena ihmisen läsnäoloon määrätyn vyöhykkeen yli.
Piiri vakiomoduulien sisällä koostuu IC BISS0001: stä, joka on suunniteltu erityisesti liiketunnistussovelluksia varten. Mukana on kaksi nappia, yksi moduulin herkkyyden säätöön ja toinen nuppi säätää ajan pituutta, kuinka kauan lähdön tulisi pysyä KORKEAna moduulin laukeamisen jälkeen.

Tutkitaan nyt PIR-anturin HC-SR501 teknisiä yksityiskohtia.
Käyttöjännite:
HC-SR501 on 5 V - 20 V, mikä tekee piirisuunnittelijoille joustavan.
Nykyinen kulutus:
HC-SR501 on akkuystävällinen laite, jonka virrankulutus on 65 mA, kun se havaitsee IR-valon muutoksen.
Ulostulojännite:
Kun moduuli havaitsee infrapunaliikkeen, lähtö lähtee 3,3 V: n KORKEAKSI, jos moduuli ei havaitse liikettä, se menee matalaksi tai 0 V: n kiinteän ajanjakson jälkeen.
Viiveaika:
Mukana on nuppi, jolla voidaan säätää lähdön pysymisajankohtaa KORKEA IR-tunnistuksen jälkeen. Tämän ajanjakson voi säätää 5 sekunnista 5 minuuttiin.
Herkkyysalue:
Tunnistusalueen kulma on noin 110 asteen kartio. Nuppi annetaan herkkyyden säätämiseksi, jota voimme vaihdella 3 metristä 7 metriin kohtisuoraan senoriin. Herkkyys pienenee, kun liikutamme anturin molempia puolia.
Käyttölämpötila:
HC-SR501: n käyttölämpötila on vaikuttava välillä -15 - +70 celsiusastetta.
Lepovirta:
Lepotila on virta, joka kulutetaan virtalähteestä, kun anturi ei havaitse liikettä tai kun se on joutokäynnillä. Se kuluttaa alle 50 uA, mikä tekee anturin paristosta ystävällisen.

PIR-liitännät ja liipaisutilat
Laukaisutilat:
PIR-moduulissa on kaksi liipaisutilaa: Yksi liipaisu / ei-toistotoiminto ja uudelleenkäynnistys. Näihin kahteen tilaan pääsee muuttamalla moduulissa ilmoitettua hyppääjän asentoa.
Yhden liipaisimen tila / Ei-toistuva tila:
Kun PIR-anturi on asetettu yhden liipaisutilaan (ja ajastimen nuppi / viiveaika asetetaan 5 sekunniksi (sanotaan)), kun ihminen havaitaan, lähtö kääntyy HIGH 5 sekunniksi ja kääntyy LOW.
Toista liipaisintila:
Kun PIR-anturi asetetaan uudelleenkäynnistystilaan, kun ihminen havaitaan, lähtö kääntyy HIGH, ajastin laskee 5 sekuntia, mutta kun toinen ihminen havaitaan näiden 5 sekunnin aikana, ajastin nollautuu ja laskee vielä 5 sekuntia toisen jälkeen ihmisen havaitaan.
Estä aika:
Estoaika on aikaväli, jolloin anturi on pois käytöstä tai ei havaitse liikettä. HC-: n estoaika
SR501 on oletusarvoisesti 3 sekuntia.
Tämä tapahtuu sen jälkeen, kun viiveaika (joka asetettiin ajastimen nupilla) lähtö lähtee LOW-asentoon 3 sekunnin ajaksi tämän jakson aikana, liikettä ei havaita. Kolmen sekunnin (LOW) kuluttua anturi on valmis havaitsemaan liikkeen uudelleen.
Toisin sanoen, kun anturi havaitsee liikkeen, lähtö lähtee HIGH, lähtö pysyy HIGH ajastimen nupin mukaan (esimerkiksi 5 sekuntia), 5 sekunnin kuluttua PIR-anturi menee LOW, LOW-signaali pysyy 3 sekunnin ajan uudesta riippumatta mahdollinen liike.
Moduulin mitat:
Anturi on tarpeeksi pienikokoinen, jotta se piiloutuu ihmisten näkyviltä, jotta se ei vaikuta koristeisiin jne. Se on 32 mm x 24 mm.
Linssin koko:
Pyroelektrisen anturin ympäröivää valkoista kupolirakennetta kutsutaan Fresnel-linssiksi, jotka lisäävät havaintoaluetta ja näyttävät läpinäkymättömältä. Se on halkaisijaltaan 23 mm.
Sovellukset:
• Turvajärjestelmät.
• Automaattiset valot.
• Teollinen automaattiohjaus.
• Automaattiset ovet.
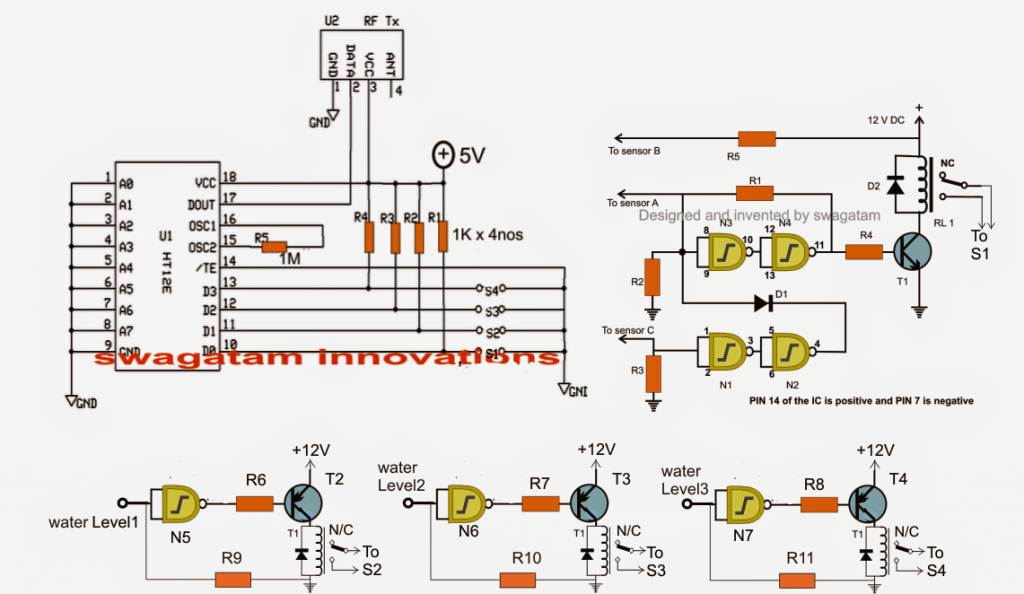
Löydät joitain PIR-anturia käyttäviä projekteja tältä sivustolta.
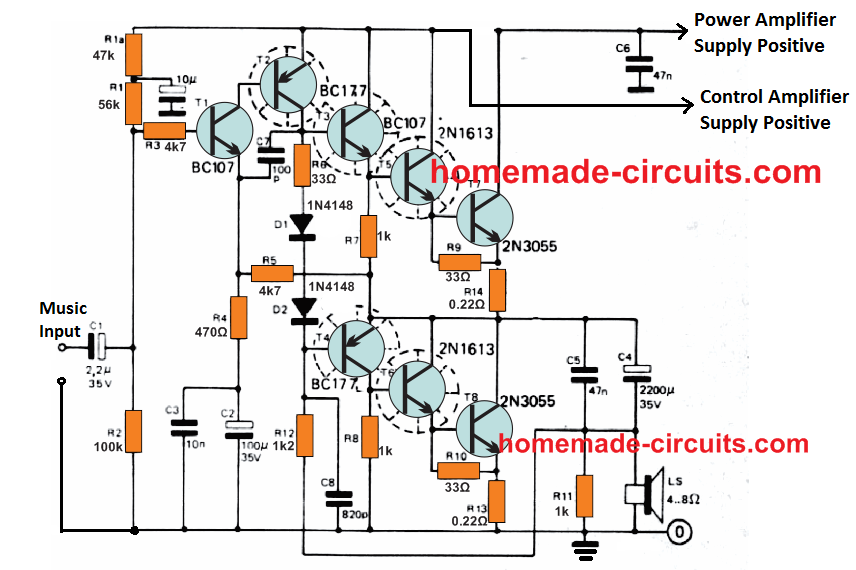
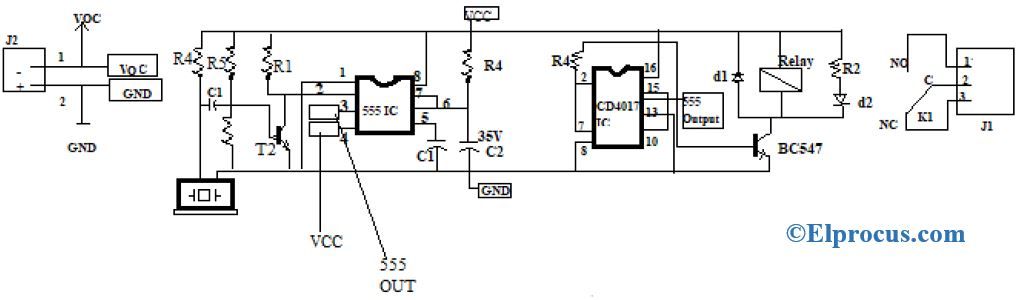
Tyypillinen PIR-moduulin piiri
Harrastajille, jotka aikovat rakentaa täydellisen PIR-moduulin yhdessä anturin ja täysimittaisen vahvistimen kanssa, seuraavaa vakiokaaviota voidaan käyttää ja käyttää mihin tahansa asiaankuuluvaan PIR-anturiin perustuvaan sovelluksen laukaisuun.

Onko sinulla vielä epäilyksiä tai kysymyksiä? Voit vapaasti laittaa ne esiin alla olevan kommenttikentän kautta
Pari: Arduino Full-Bridge (H-Bridge) -invertteripiiri Seuraava: Ajoneuvon nopeudenilmaisupiiri liikennepoliisille