Nouto- ja sijoitusrobotti on se, jota käytetään kohteen noutamiseen ja sijoittamiseen haluttuun paikkaan. Se voi olla sylinterimäinen robotti, joka tarjoaa liikkeen vaaka-, pystysuorassa ja pyörimisakselissa, pallomainen robotti, joka tarjoaa kaksi pyörimisliikettä ja yhden lineaarisen liikkeen, nivelrobotti tai pelottelurobotti (kiinteät robotit, joissa on kolme pystysuoraa akselia).
Edut
Ennen kuin siirrymme eteenpäin, katsokaamme muutamia syitä robottien valitsemiseen ja sijoittamiseen:
- He ovat nopeampi ja pystyvät saamaan työn aikaan sekunneissa verrattuna ihmisiin.
- Ne ovat joustavia ja niillä on asianmukainen muotoilu.
- Ne ovat tarkkoja.
- Ne lisäävät työympäristön turvallisuutta eivätkä koskaan väsy.
Pick N Place -robotin osat

Valitse N-paikkainen robotti
Katsotaanpa, mistä pick and place-robotti todella koostuu:
- Roveriin : Se on robotin päärunko, joka koostuu useista jäykistä kappaleista, kuten sylinteri tai pallo, nivelet ja lenkit. Se tunnetaan myös manipulaattorina.
- Päätehoste : Roverin viimeiseen liitokseen liitettyä runkoa käytetään esineiden tarttumiseen tai käsittelyyn. Se voi olla analogia ihmisen käsivarteen.
- Toimilaitteet : He ovat robotin kuljettajia. Se todella käyttää robottia. Se voi olla mikä tahansa moottori, kuten servomoottori, askelmoottori tai pneumaattiset tai hydraulisylinterit.
- Anturit: Niitä käytetään sisäisen ja ulkoisen tilan tunnistamiseen varmistaakseen, että robotti toimii kokonaisuutena sujuvasti. Anturit sisältävät kosketusantureita, IR-antureita jne.
- Ohjain : Sitä käytetään toimilaitteiden ohjaamiseen anturin takaisinkytkennän perusteella ja siten jokaisen liitoksen liikkeen ja lopulta pääefektorin liikkeen ohjaamiseen.
Pick N Place -robotin työskentely:
A: n perustoiminto valitse robotti tehdään sen nivelillä. Nivelet ovat analogisia ihmisen nivelten kanssa, ja niitä käytetään robotin kahden peräkkäisen jäykän rungon liittämiseen. Ne voivat olla pyörivä liitos tai lineaarinen liitos. Jotta voisimme lisätä liitoksen mihin tahansa robotin linkkiin, meidän on tiedettävä kyseisen ruumiinosan vapausasteet ja liikkumisasteet. Vapausasteet toteuttavat kehon lineaarisen ja pyörivän liikkeen ja liikkumisasteet tarkoittavat akselin lukumäärää, jota keho voi liikkua.

Yksinkertainen Pick N Place -robotti
Yksinkertainen poimi- ja sijoitusrobotti koostuu kahdesta jäykästä kappaleesta liikkuvalla alustalla, jotka on yhdistetty pyörivällä liitoksella. Pyörivä liitos on sellainen, joka tarjoaa pyörimisen 360 astetta minkä tahansa akselin ympäri.
- Pohja tai pohja on kiinnitetty pyörillä, jotka tarjoavat lineaarisen liikkeen.
- 1stjäykkä runko on kiinteä ja tukee toista jäykkää runkoa, johon päätefektori on järjestetty.
- 2ndjäykkä runko on varustettu kaikilla 3 akselilla ja siinä on 3 vapausastetta. Se on kytketty 1strunko pyörivällä liitoksella.
- Päätehosteen tulisi sijoittaa kaikki 6 vapausastetta, jotta se saavuttaa komponentin kaikki sivut, jotta se voi ottaa aseman mille tahansa korkeudelle.
Kaiken kaikkiaan perus- ja poikkirobotti toimii seuraavasti:
- Pohjan alla olevat pyörät auttavat siirtämään robotin haluttuun paikkaan.
- Päätefektoria tukeva jäykkä runko taipuu tai suoristuu saavuttaakseen paikan, johon esine asetetaan.
- Päätefektori nostaa esineen voimakkaalla otteella ja asettaa sen haluttuun asentoon.
Nyt kun meillä on lyhyt käsitys pick and place -robotista, peruskysymys on, kuinka sitä todella ohjataan.
Yksinkertaista poimimis- ja sijoitusrobottia voidaan ohjata ohjaamalla sen päätehosteen liikettä. Liike voi olla hydraulinen liike, ts. Hydraulisen nesteen käyttö paineen alaisena robotin käyttämiseksi, tai pneumaattinen liike, ts. Paineistetun ilman käyttö mekaanisen liikkeen aikaansaamiseksi. Tehokkain tapa on kuitenkin käyttää moottoreita tarvittavan liikkeen aikaansaamiseksi. Moottoreita on ohjattava vaaditun liikkeen aikaansaamiseksi robotille ja päätefektorille.
Toimiva esimerkki Pick N Place -robotin ohjaamisesta
Entä robotin hallinta muutamalla näppäimistön painikkeella? Kyllä se on mahdollista! Vain painamalla tarvittavaa painiketta voimme lähettää komennon robotille, jotta se liikkuu mihin tahansa suuntaan tehtävämme saavuttamiseksi. Lisäksi tämä voidaan saavuttaa käyttämällä yksinkertaista langatonta viestintää.
Katsotaanpa, miten tämä todella toimii:
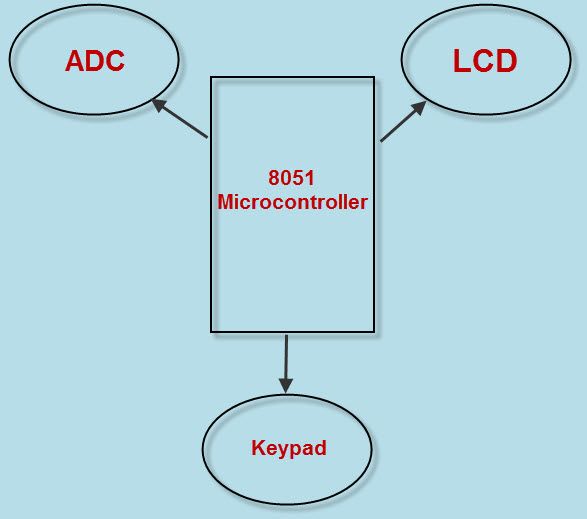
Lähetinosa koostuu mikrokontrolleriin liitetystä näppäimistöstä. Mikä tahansa desimaalimuodossa oleva painikkeen numero muunnetaan nelinumeroiseksi binäärimuodoksi mikro-ohjaimella ja yhden sen portin rinnakkaislähtö kohdistetaan kooderiin. Kooderi muuntaa tämän rinnakkaisdatan sarjatiedoksi ja tämä syötetään lähettimeen, joka on varustettu antennilla sarjatietojen lähettämiseksi.

Lohkokaavio, jossa näkyy Pick N Place -robotin lähetin
Vastaanottopuoli koostuu dekooderista, joka on liitetty mikrokontrolleriin. Dekooderi muuntaa vastaanotetun komennon sarjamuodossa rinnakkaiseksi ja antaa nämä tiedot mikro-ohjaimelle. Tämän komennon perusteella mikrokontrolleri lähettää sopivat tulosignaalit moottoriohjaimille kuljettamaan vastaavia moottoreita.

Lohkokaavio, jossa näkyy Pick N Place -robotin vastaanotin
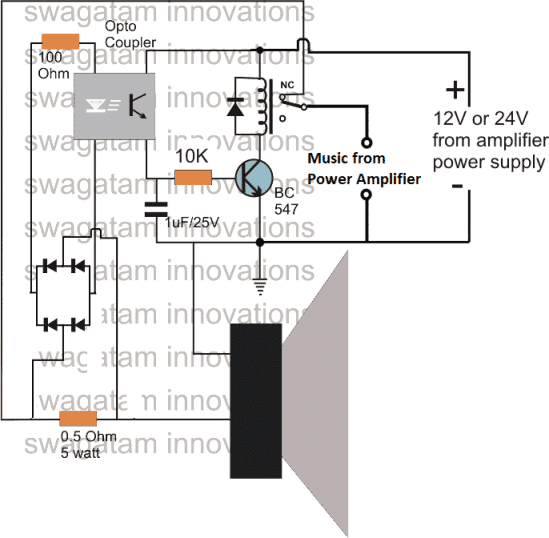
Järjestelmä koostuu kahdesta moottorista liikkeen tarjoamiseksi koko robotille ja kahdesta muusta moottorista käsivarren liikkeen aikaansaamiseksi. Päätefektoria tai tarttujaa on ohjattava kohdistamaan esineeseen asianmukainen paine käsittelemään sitä tehokkaasti, jotta pehmeä kahva . Tämä varmistetaan ohjaamalla käsivarsien moottoreita asianmukaisella komennolla. Varsi- moottoreiden lähtö on kytketty 10 ohmia / 2 W vastukseen ja moottorin ylikuormituksen tai lukitun tilan aikana vastuksen yli kehittyy korkea jännite, mikä aiheuttaa loogisen korkean tason optoisolaattorin ja keskeytyksen ulostulossa mikro-ohjaimen nasta, joka on kytketty optoisolaattorin ulostuloon pnp-transistorin kautta, saa loogisen matalan signaalin, joka pysäyttää kaikki muut tarttujan toiminnot.
Siten yksinkertaisen radiotaajuisen viestinnän avulla voimme todella hallita poimimis- ja sijoitusrobottia.
Pick and Place -robotin käytännön sovellukset:
- Puolustussovellukset : Sitä voidaan käyttää valvontaan ja myös poimia haitallisia esineitä, kuten pommeja, ja levittää niitä turvallisesti.
- Teolliset sovellukset : Näitä robotteja käytetään valmistuksessa tarvittavien osien poimimiseksi ja sijoittamiseksi oikeaan asentoon koneen kiinnityksen viimeistelemiseksi. Sitä voidaan käyttää myös esineiden asettamiseen kuljetinhihnalle sekä poimia viallisia tuotteita kuljetushihnalta.
- Lääketieteelliset sovellukset : Näitä robotteja voidaan käyttää erilaisissa kirurgisissa toimenpiteissä, kuten nivelen korvaamisoperaatioissa, ortopedisissa ja sisäisissä leikkauksissa. Se suorittaa toiminnot tarkemmin ja tarkemmin.
Näitä sovelluksia lukuun ottamatta näitä robotteja voidaan käyttää myös useissa muissa ihmiskunnalle sopivissa sovelluksissa.
Nyt kysymys on edelleen - kuinka kauan on päivä, jolloin robotit helpottavat täysin tietä ihmisille?