Artikkelin tässä osassa opitaan innovatiivisesta menetelmästä sähköajoneuvojen poljinpuristusmekanismin muuttamiseksi vastaavasti vaihtelevaksi sähköiseksi signaaliksi, jota voidaan edelleen käyttää ajoneuvon nopeuden säädön käsittelyyn.
Selitetty konsepti toimii kuin elektroninen kaasupoljin, joka lisää ajoneuvon nopeutta lineaarisesti, kun poljinta painetaan vähitellen, ja päinvastoin PWM-tekniikkaa käyttäen
Idean pyysi Lokesh Maini
Tekniset tiedot
Olen mekaaninen kaveri, työskentelen tällä hetkellä sähköajoneuvon parissa ja haluan ohjata moottorini nopeutta polkimella. En saa ohjainta moottorilleni, auta minua rakentamaan oma, olen erittäin hyvä
kiitollinen
Moottorin tekniset tiedot ovat 36 voltin, 43 ampeerin ja 1,5 hv: n harjattu tasavirtamoottori.
Mekaaninen suunnittelu
Pedaalikiihdyttimen elektroninen versio vaatii ensisijaisesti mekanismin, joka muuntaa ensin polkimen mekaanisen painamisen vastaavasti vaihtelevaksi sähköiseksi signaaliksi, jotta tämä signaali voidaan käsitellä signaaliprosessorivaiheen kautta halutun muuntamisen nopeuden käytännön ohjaamiseksi. ajoneuvoon.
Monia konsepteja voidaan kokeilla esimerkiksi käyttämällä piezo-kuormantunnistinta, kapasitiivista kuormitusanturia, resonanssianturia jne. Tässä artikkelissa opitaan paljon yksinkertaisempi menetelmä, jonka olen suunnitellut ja joka sisältää LED / LDR-kokoonpanon saman saavuttamiseksi. .

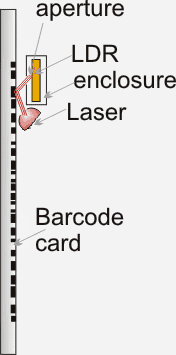
Yllä olevassa kuvassa esitetyssä sähkömekaanisessa järjestelyssä voimme nähdä seuraavat integroidut komponentit:
Pieni vaihde, joka on kiinnitetty ruuvimekanismilla.
Ruuvin pää, jossa on maton heijastimen pinta
LED / LDR-kokoonpano, joka on sijoitettu ruuvin kannan eteen.
Kuinka ehdotettu mekanismi toimii.
Edellä olevassa kuvassa esitetty vaihde on lukittava toisella vaihteella, jonka suhde voi olla 10 kertaa suurempi kuin tämä vaihde.
Suurempi vaihde on määritettävä polkimen mekanismilla siten, että se käynnistää pyörimisliikkeen vastauksena polkimen painamiseen.
Hammaspyörien kiertovaste tuottaa puolestaan ruuvipään eteenpäin suuntautuvan liikkeen kammion yli, jossa LED / LDR-kokoonpano sijaitsee.
Prosessi saa LDR: n vastaanottamaan suhteellisesti vaihtelevan määrän LEDistä heijastunutta valoa.
Tämä vaihteleva data (vaihtelevan vastuksen muodossa), joka vastaa polkimen painetta, voidaan sitten syöttää signaaliprosessoripiiriin tietyn ajoneuvon aiotun nopeuden ohjauksen toteuttamiseksi.
vuonna seuraava viesti opimme signaaliprosessorin vaiheen PWM-tekniikalla.
vuonna yllä saimme tietää yksinkertaisesta sähkömekaanisesta muunninkokoonpanosta pedaalin toiminnan muuttamiseksi suhteellisesti vaihtelevaksi sähköiseksi signaaliksi.
Muuntaa polkimen toiminta PWM: ksi
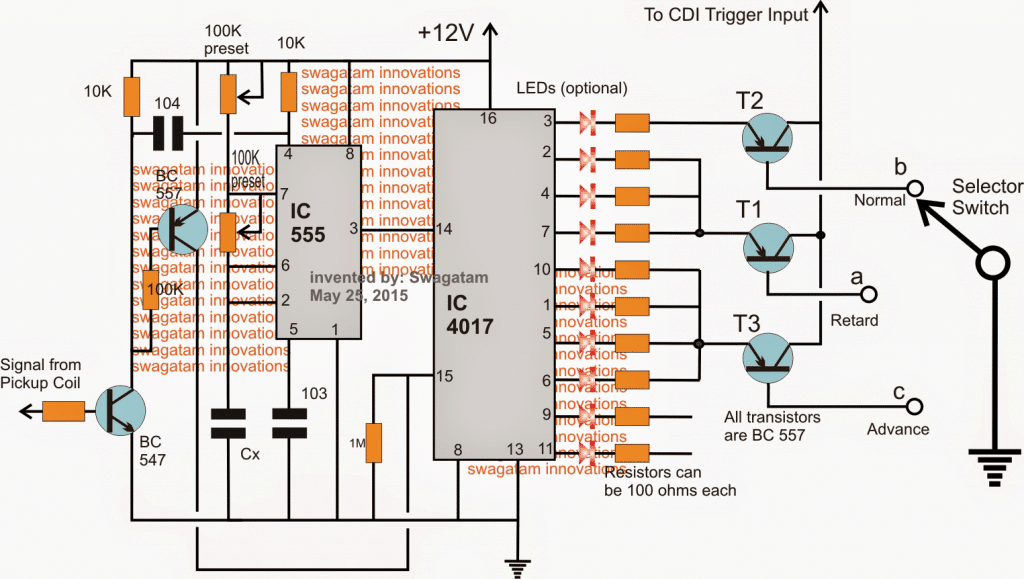
Tutkitaan nyt piirin toteutusta, jonka avulla voimme muuntaa polkimen sähköisen signaalin vastaavasti vaihtelevaksi PWM-signaaliksi ajoneuvon aiottua moottorin nopeuden ohjausta varten.

Edellä olevaan piirikaavioon viitaten voimme arvioida piirin toimintaa seuraavien kohtien avulla:
IC1 on konfiguroitu 80 Hz: n pulssigeneraattoriksi, jonka toimintajaksona on suurin ON-aika ja pienin OFF-aika
IC2 on verrattu vertailulaitteeksi, joka muuntaa ensin sen pin2: ssa käytetyn yllä olevan 80 Hz: n pulssin sen pin6: lla muodostetuilla kolmioaalloilla ja vertaa kolmion aaltoja sen pin5: ssä käytettävissä olevaan modulointijännitteeseen.
Pin5-moduloiva jännite on johdettu BJT BC547 -lähettimestä, joka on konfiguroitu yhteiseksi keräilijäksi, jonka pohja on kytketty pedaalin toiminnoilla saavutettuihin LDR-tuloihin.
Vaihtelevia vastuksia vasteena polkimen painamiseen verrataan 100K: n esiasetettuun asetukseen ja transistorin juurelle kehitetään suhteellinen jännitteen suuruus, joka muuntaa matalavirtaisen tulon vastaavaksi suurvirtasignaaliksi IC2: n pin5: n yli.
Tämä hetkellinen potentiaalitaso hyväksytään ja käsitellään IC2: lla generoimalla PWM-signaalien suhteellinen suuruus mosfetille ja liitetylle moottorille.
Täten moottorin nopeutta ohjataan ja vaihdellaan vaihtelevan PWM: n mukaan vastauksena ajoneuvon polkimen painalluksiin.
Edellä mainitut menettelyt muuttavat polkimen toiminnot ajoneuvon moottorin ja sen nopeuden hallituksi toiminnaksi.
Kuinka asettaa piiri.
Se on erittäin helppoa.
- Paina poljin maksimipisteeseensä siten, että ruuvin pää saavuttaa lähimmän mahdollisen asennon LED / LDR-kokoonpanon edessä.
- Seuraavaksi säädä 100 k: n esiasetusta, kunnes IC2: n nasta 3 alkaa tuottaa PWM: iä maksimileveydellä, tämä voidaan vahvistaa mittaamalla nastan 3 jännite mahdollisimman lähelle piirin syöttöjännitettä, ts. 5 V.
- Kun tämä on tehty, perustamismenettelyn voidaan olettaa olevan täydellinen.
- Tulokset voidaan nyt tarkistaa painamalla poljinta eri tasoilla ja tarkistamalla, että moottorin nopeus vaihtelee samalla tavalla.
Edellinen: Yksinkertainen ESR-mittaripiiri Seuraava: Kuinka rakentaa kasvava valopiiri