Viestissä selitetään yksinkertainen este, joka välttää robottipiirin ilman mikro-ohjainta ja käyttämättä erityisiä moottorin ohjainpiirejä tai IC: itä. Idean pyysi Faiyyaz
Muotoilu
Pohjimmiltaan se on muodossa liikkuva ajoneuvo joka pystyy havaitsemaan ja välttämään mahdollisia esteitä polullaan ja muuttamaan suuntaa sopivasti niin, että sen liike pysyy keskeytymättömänä, yksinkertaisena!
Toiminta on siten automaattista ilman manuaalista tai ihmisen väliintuloa.
Esitetty idea robotin välttämisestä ilman mikro-ohjainta, kuten nimestä voi päätellä, ei käytä mikro-ohjainta, ja siksi se on erittäin helppo rakentaa ja sopii kaikille uusille harrastajille.
Piiriä suunniteltaessa tajusin, että periaatteen toteuttamiseksi tarvitaan ainakin pari estesensorimoduulia, koska yhden moduulin käyttö voi aiheuttaa moottorin virheellistä liikettä eikä välttämättä auta ajoneuvon sujuvaa suuntaamista tai kääntämistä kohti vapaa polku.
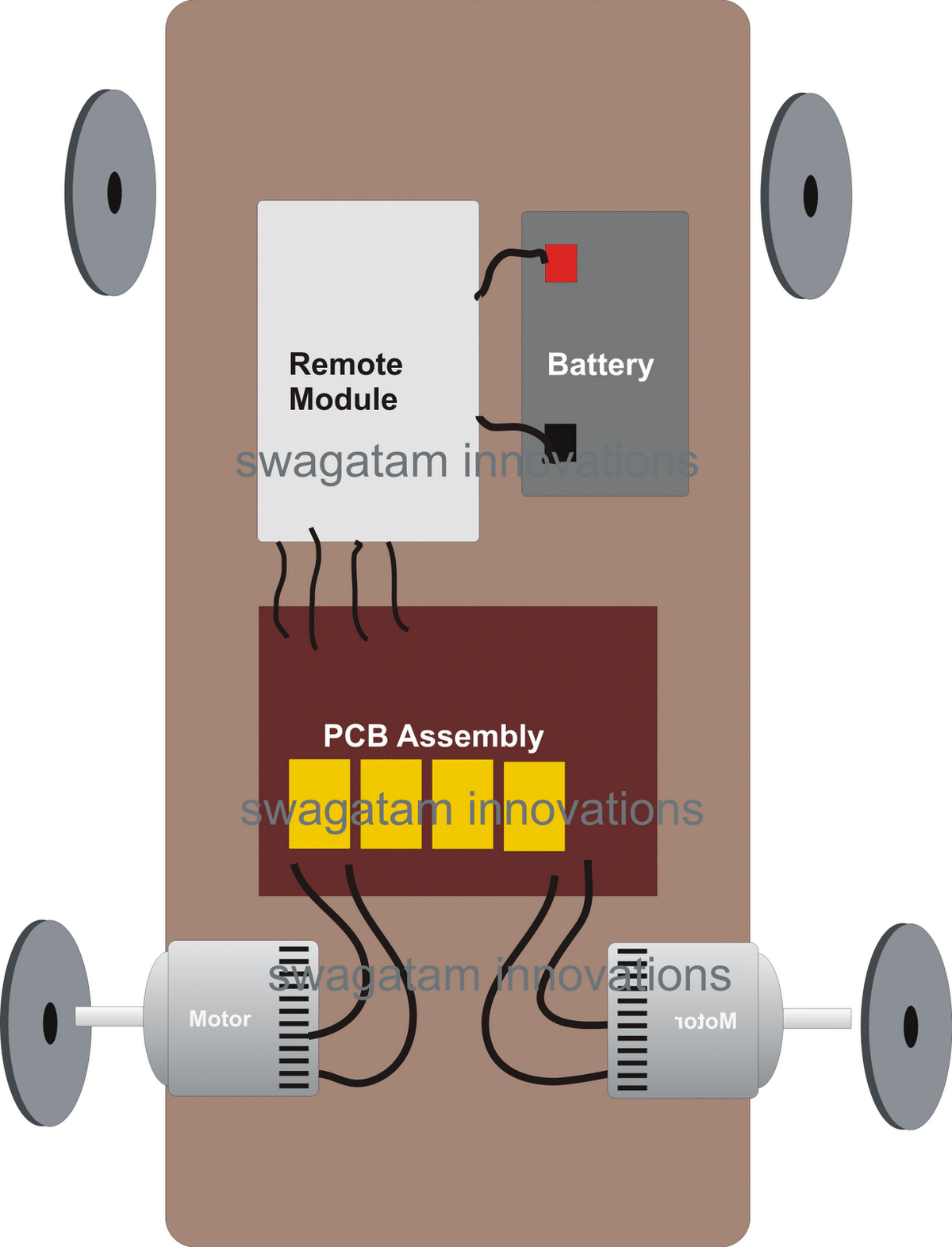
Asennettu ajoneuvomoottori on melko samanlainen kuin kaukosäädin lelu auto josta olin keskustellut yhdessä aikaisemmista viesteistä.
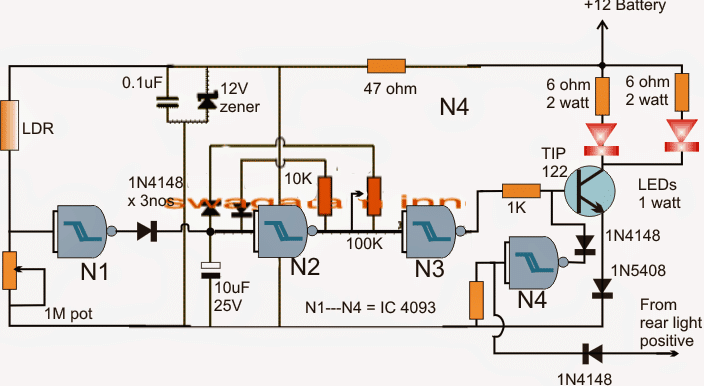
Seuraava kaavio kuvaa yhtä järjestelmän moduuleista, ja siksi tällaisia moduuleja tarvitaan kaksi tai pari ajoneuvon oikealle ja vasemmalle puolelle.
Idea on yksinkertainen ja toimii ilman mikro-ohjainta ja ilman erityisiä moottoriohjainpiirejä. Tämä tarkoittaa, että voit tehdä sen ilman minkäänlaista koodausta ja käyttämättä minkäänlaista monimutkaista moottoriohjaimen IC: tä ..... ja piirin avulla voit käyttää mitä tahansa tasavirtamoottoria sen tehosta riippumatta, joten jopa suuritehoiset esteet, jotka välttävät ajoneuvoja, voivat olla valmistettu tällä piirillä, joita käytetään yleensä ostoskeskuksissa ja vastaavissa vähittäismyymälöissä.
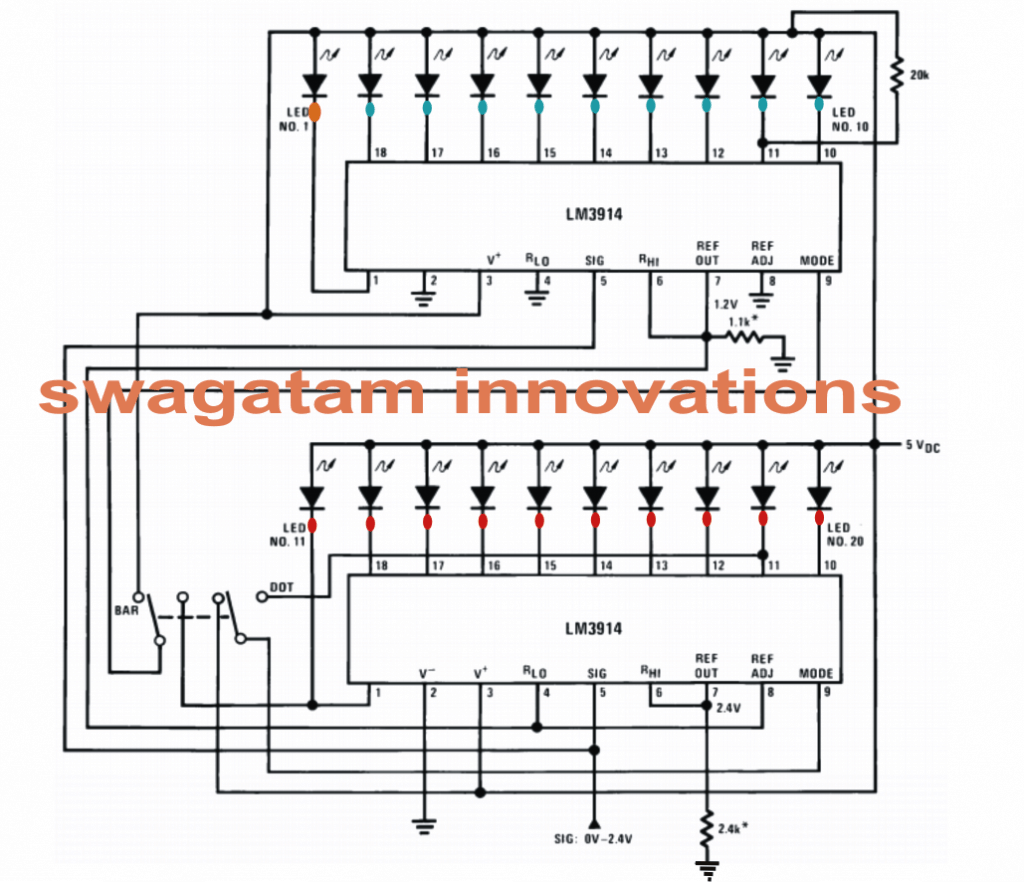
Piirikaavio

Yritetään nyt ymmärtää yllä oleva piiri seuraavan selityksen avulla:
Kuinka se toimii
IC 555 on konfiguroitu IR-lähettimeksi ja se on asetettu tuottamaan vakio 38 kHz: n taajuus, kun taas viereinen transistoroitu piiri on konfiguroitu vastaanotinvaiheeksi tai IR-anturivaiheeksi.
Oletetaan, että se on oikeanpuoleinen moduuli, ja oletetaan, että tämä moduuli sattuu olemaan ensimmäinen, joka havaitsee esteen polulla.
Siksi heti kun este havaitaan, 555 IC: n tuottama 38 kHz: n taajuus heijastuu viereisen vastaanotinpiirin anturia kohti.
Vastaanotin aktivoi välittömästi siihen liittyvät transistorit siten, että lopullisen ohjaintransistorin johtaminen estetään.
Nyt tämän transistorin ohjaaman moottorin oletetaan olevan ajoneuvon vasemmalla puolella, toisin sanoen tämän moduulin vastakkaisella puolella ... samoin oikealla puolella olevaa moottoria ohjaa tosiasiallisesti vasemmanpuoleinen moduuli .
Tämän seurauksena, kun yllä oleva oletettu oikeanpuoleinen esteenilmaisinmoduuli aktivoituu, se pysäyttää vasemmanpuoleisen moottorin, kun taas oikeanpuoleisen moottorin annetaan liikkua normaalisti.
Tämä tilanne johtaa siihen, että ajoneuvo pakotetaan siirtymään vasemmalle sivulle ... mikä tarkoittaa, että oletettu vasen moduuli alkaa saada entistä voimakkaampia estesignaaleja ja pakottaa ajoneuvon jatkamaan kovempaa eteenpäin menossa, kunnes se on kokonaan välttänyt esteen . Moduuli lopettaa nyt estesignaalien vastaanottamisen ja ajoneuvo alkaa liikkua normaalisti uudella tiellään.
Kun edellä mainittu suuntaus suoritetaan, vasemmanpuoleisen moduulin on pakko tulla yhä eristyneemmäksi ja kauemmas esteestä, jotta se ei saa mahdollisuutta puuttua menettelyyn ja sallia ajoneuvon siistin ja tasaisen ohjaamisen.
Aivan samat menettelyt toteutetaan, jos vasemmanpuoleinen moduuli sattuu havaitsemaan esteen oikeanpuoleisen moduulin edessä, jolloin ajoneuvo on pakko liikkua yhä kovemmin kohti oikeaa puolta.
Voimme nähdä myös moduulissa olevan 'käytöstä poistavan' piiripiirin, joka on kytketty toisiinsa vasemman ja oikean puolen moduulien poikki. Tämä vaihe otetaan tarkoituksella käyttöön sen varmistamiseksi, että molempia moduuleja ei koskaan aktivoida yhdessä.
Siksi esimerkiksi jos vasemmanpuoleisesta moduulista tulee ensimmäinen, joka havaitsee esteen, se poistaa välittömästi oikeanpuoleisen moduulin käytöstä ja aloittaa ajoneuvon ohjaamisen oikealle ja päinvastoin.
Anturin IC voi olla vakio TSOP17XX-sarja
Lisätietoja yllä olevasta anturi-IC: stä voit oppia TSOP1738 IC: n yhdistäminen
Ja moottori tulisi varustaa vaihdelaatikoilla, jotta liike pysyy alun perin hallitulla tasolla.
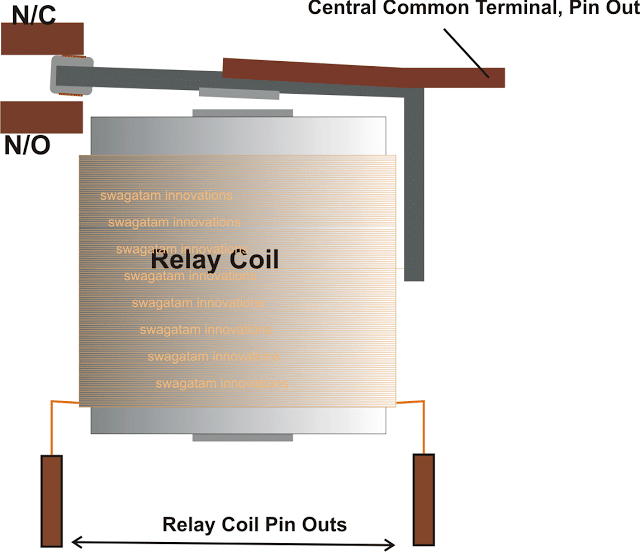
Pyörän asennus
Vasemman ja oikean moduulin täydellinen asennus ja siihen liittyvät sähköliitännät voidaan nähdä alla olevasta kuvasta:

Päivittää
Pieni ajattelu kertoo meille, että yllä oleva yksinkertainen este välttää robottipiiri voitaisiin toteuttaa myös käyttämällä yhtä moduulia näiden kahden sijaan.
Yksi moduuli antaisi ajoneuvolle mahdollisuuden suorittaa yksipuolinen suuntaus aina, kun se havaitsee esteen, joten järjestelmä voitaisiin konfiguroida joko suorittamaan myötäpäivään tai vastapäivään sen mukaan, mikä moottori on kytketty piiriin toimintoja varten.
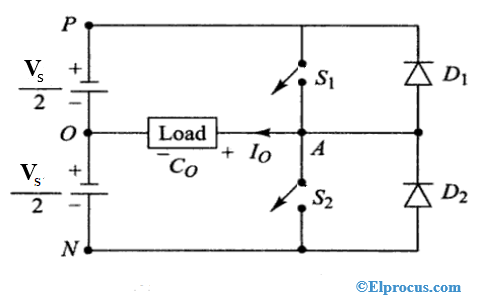
Asetettu esimerkki voidaan visualisoida seuraavassa kuvassa:

Näyttää kuitenkin siltä, että yllä olevalla yksittäisellä moottorilla on yksi ongelma. Jos oletetaan, että ajoneuvo kohtaa oikean kulman kulman vasemmalla puolella. Tämä pakottaa ajoneuvon jatkamaan liikkumista vastapäivään, kunnes se kääntyy U-käännökseen ja alkaa liikkua takaisin samaan suuntaan, mistä se oli alkanut. Tätä käyttäjä ei arvostaisi.
Edellinen: SMD-vastukset - esittely ja työskentely Seuraava: Kuinka kiihtyvyysanturi toimii