Artikkelissa selitetty liiketunnistinpiiri toimii käyttämällä dopplersiirtoperiaatetta, jossa liikkuva kohde havaitaan jatkuvasti vaihtelevan taajuuden kautta, heijastettuna liikkuvasta kohteesta.
Mikä on Doppler-vaikutus
Yksi erittäin kiehtova äänen piirre on Doppler-ilmiö .
Doppler-ilmiö tapahtuu, kun äänitaajuutta tuottava lähde liikkuu jatkuvasti. Kun liikkuva äänilähde tulee lähemmäksi, äänenvoimakkuus näyttää kasvavan taajuudeltaan ja voimakkuudeltaan, ja kun se menee pois, äänen taajuus ja äänenvoimakkuus näyttävät vähenevän.
Jos äänen alkuperä ei liiku ja astut lähteeseen tai pääset kauas lähteestä, koet saman Doppler-vaikutelman.
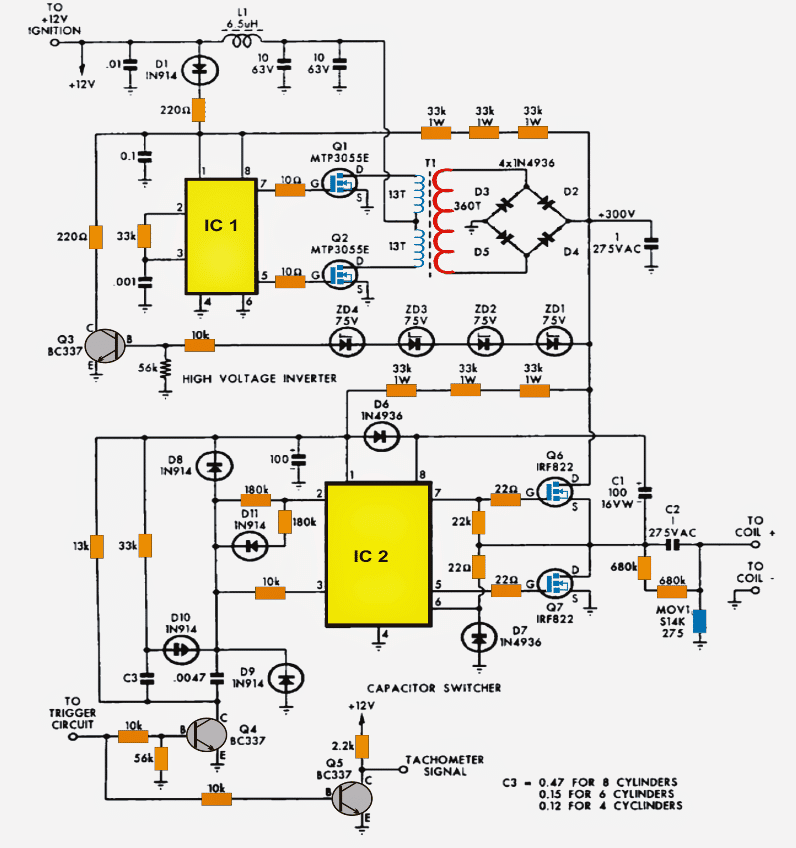
Yllä oleva liiketunnistinpiiri toimii Doppler-ilmiö havaita liike tietyllä alueella.
Korkean taajuuden (15-25 kHz) äänilähetin on kohdistettu määritetylle alueelle, ja herkkä anturi sijoitetaan lähteen viereen samalla polulla kuin lähettimen anturi.
Niin kauan kuin kohdealueella ei ole liikettä, heijastuneen äänen taajuus ja lähetetty ääni ovat yleensä täsmälleen samalla taajuudella.
Kuitenkin, kaikenlainen liike Kohteen mukaan seurauksena on pieni taajuuden muutos, jonka vastaanotin havaitsee nopeasti ja joka näkyy liitetyn näyttöyksikön päällä.
Kuinka piiri toimii

SPKR1 ja SPKR2 OVAT 27 MM PIEZO-ANTURIT, SPKR3 VOI OLLA Pieni 8 Ω: n KAIUTINKAIUTIN, KUULOKKEEN TAI AC-VOLMETTORI
Viitaten yllä olevaan piirikaavioon, IC1 (a 567 vaihelukittu silmukka ) on asennettu kuin viritettävä oskillaattori, jonka lähtötaajuusalue on 15-25 kHz. Potentiometri R22 käytetään oskillaattorin lähtötaajuuden mukauttamiseksi.
Transistori Q1 puskuroi IC1-lähdön ja soveltaa sitä anturi BZ1. Heijastunut äänitaajuus kaapataan toisen anturin BZ2 avulla, joka on konfiguroitu piirin vastaanotinvaiheella ja kohdistettu Q2: n kantaan.
Tehostettu lähtö Q2: n kautta kohdistetaan IC2: een (joka on kytketty kaksinkertaisen tasapainotetun sekoittimen tavoin) napaan 1. Vielä yksi äänisignaali (erotettu IC1: n ulostulosta) lähetetään IC2: lle napaan 10.
Vastusta R21 (joka on 50 k: n potentiometri) käytetään kuin kantoaaltotasapainon säädin, jota voidaan säätää sen varmistamiseksi, että oskillaattorin signaali ei vuoda sirun IC2 sekoittimen ulostuloon tapissaan 6.
Sekoittimen lähtö IC2: n nastassa 6 syötetään alipäästösuodattimen kautta IC3: n tuloon (joka on rakennettu IC LM 386 , matalajännitteinen äänen vahvistin).
Sopivan kaiuttimen tai kuulokeparin avulla voit tarkistaa IC3: n lähdön.
Potentiometriä R23 käytetään äänenvoimakkuuden säätönä.
Kuinka testata ja määrittää
Käytännössä mikään ei saa olla liian kriittinen tässä doppler-liiketunnistinpiirissä. Totuus on, että piiri voitaisiin rakentaa yksinkertaisesti palalevyn päälle.
Ja jos rakennat tämän yksikön mukavan ja puhtaan piirilevyn päälle (varmistaen, että kaikki komponenttijohdot pidetään mahdollisimman pieninä), voit saada haluamasi tulokset nopeasti.
Voi olla suositeltavaa, että pidät vastaanottimen tulon ja lähettimen lähtöpiirit erillään toisistaan, rakenteen asettelussa niin pitkälle kuin mahdollista, ja käytä pistorasioita kaikille ilmoitetuille mikropiireille.
Aloita testaus asettamalla kaksi anturia BZ1 / BZ2 (SPKR1 / SPKR2) suunnilleen 4 tuuman etäisyydelle toisistaan, tarkennettuna samaan suuntaan ja kaukana lähellä olevista kohteista.
Säädä muuttuvat vastukset R21, R22 ja R23 keskipisteisiin ja kytke virta virtapiiriin.
Jos havaitset lähettimen lähdön olevan kuultavissa, oskillaattorin taajuus on saattanut olla kiinteä hyvin matalalla. Siinä tapauksessa voit hienosäätää R22: tä, kunnes et enää voi kuunnella taajuutta.
Säädä seuraavaksi R21: tä, kunnes saavutat BZ1: n (SPKR1) hiljaisimman äänen.
Tämän jälkeen yritä liikuttaa kättäsi ylös ja alas kahden anturin edessä (SPKR1 / SPKR2), ja tämän pitäisi aiheuttaa vaihtelevan matalataajuisen äänen kaiuttimessa (SPKR3).
Kun liikutat kättäsi nopeammin, sinun pitäisi löytää ulostulotaajuuden nousevan niin paljon. Erittäin hitaasti liikkuvien kohteiden kohdalla saatat haluta nähdä vaikutuksen liikkuvaan kelatyyppiseen DC-mittariin, joka on kytketty IC3-lähdön yli, tapiin 5.
Saatat nähdä mittarin neulan vaihtelevan ylös / alas asteikon yli vastauksena hitaasti liikkuvaan esineeseen, joka kulkee ennen antureita.
Edellinen: 4 tehokasta PWM-vahvistinpiiriä selitetty Seuraava: Katto-LED-lampun ohjainpiiri
![Rakenna yksinkertainen Buck-muunninpiiri [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)