Viestissä selitetään yksinkertainen linjalaserohjattu moottoriohjainpiiri, joka toimii reagoimalla tarkkaan vaakasuoraan laserlinjaan, joka on muodostettu linjalaseritasolaitteesta, ja säätää liitetyn työkalun tai työtyön kohdistuksen automaattisesti äärimmäisen täydellisesti ja tarkasti.
Mikä on Line Laser
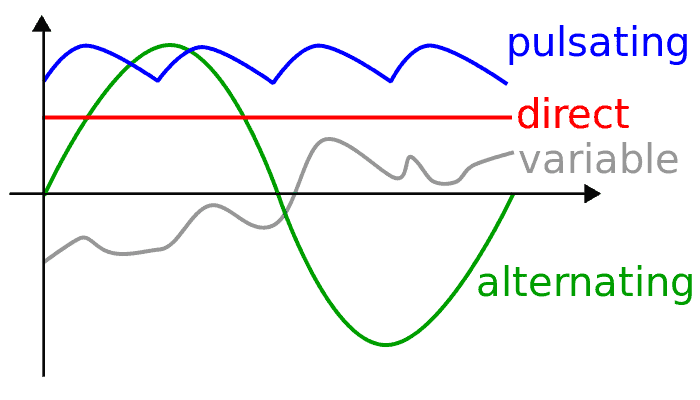
Linjalaserlaitteet ovat korkean tarkkuuden elektroniset korvaukset puusepille ikääntyneille vesivaakojen tasauslaitteille.
Linjalaserlaite on edistyksellinen lasersäteilijä, joka voi tuottaa 360 asteen ° erittäin tarkka valaistu vaakasuora laserlinja, joka tarjoaa kalibrointiviitteen kaikkiin teollisuuden tai rakennustekniikan töihin, jotta työn lopputulos on täysin suora ja kohdistettu ilman pienintäkään virheitä.
Piiriä pyysi yksi tämän blogin omistautuneista lukijoista, herra Rafal.
Linjalaserohjatun moottorin työskentelymenetelmää koskevat yksityiskohtaiset keskustelut voidaan oppia seuraavista kohdista:
Suunnittelun tavoite
Herra. Rafal: Olen tässä hyvin uusi. Olen tehnyt tutkimusta viime viikkojen aikana, enkä ole löytänyt tarkalleen mitä tarvitsen.
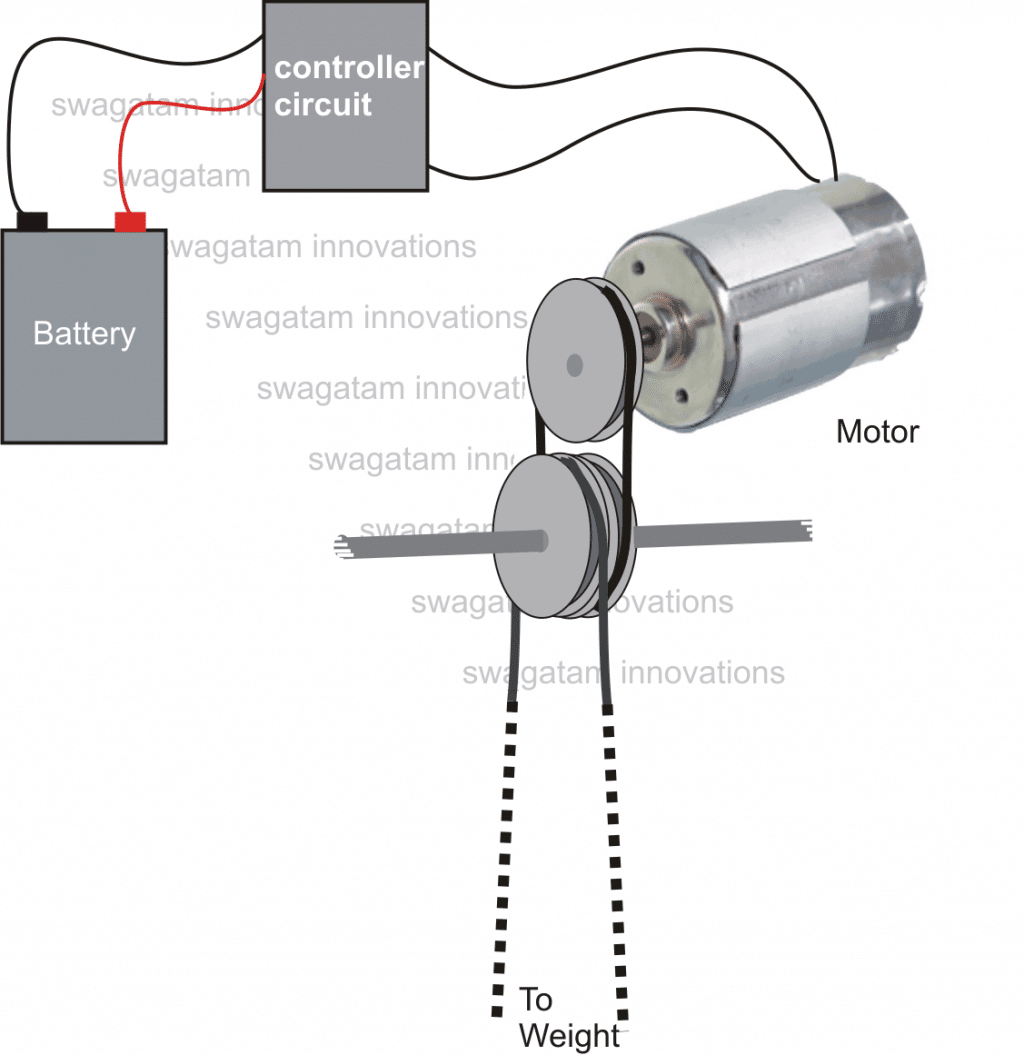
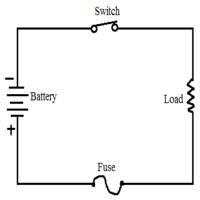
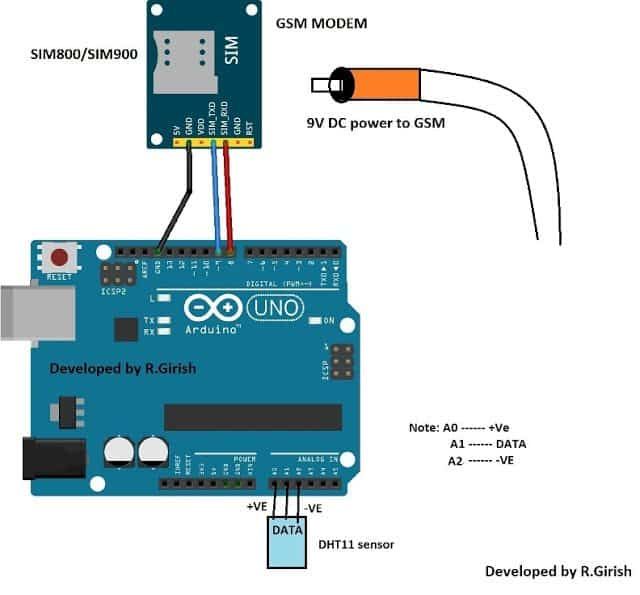
Olen kiitollinen kaikesta avusta. Liitän kuvan ideastani. Haluan ohjata kahta 12 V DC -moottoria lasertasolla.
Linjalaseritaso ilmoittaa vastaanottimista.

Tämän signaalin on sitten ohjattava 12 V DC -moottorin suuntaa. Moottori kiertää kierretankoa edestakaisin työkalun korkeuden säätämiseksi.
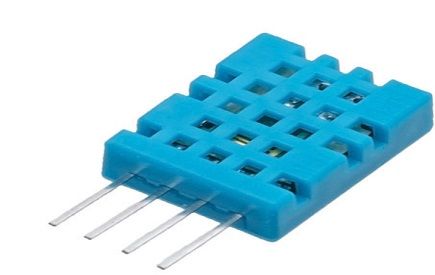
Sen perusteella, mitä löysin, useita valodiodeja olisi kytketty rinnakkain, yksi asetettu havaitsemaan laser nollatason yläpuolella ja toinen tämän tason alapuolella. Nollataso on vain jonkinlainen tauko fotodiodien välillä, jotta järjestelmä ei herää. Lasertunnistin ilman näyttöä. Annoin vain kuvallisen kuvan.
Tarvitsen H-sillan piirin, mutta kaikki löytämäni on käytettävä Arduino-järjestelmän kanssa. Tarvittaessa voin ostaa valmiin sillan kohtuulliseen hintaan, jopa 30 dollariin
Ihannetapauksessa tämä toimisi sekä punaisen että vihreän laserin kanssa, mutta aallonpituudet ovat niin erilaisia, että epäilen, että se voitaisiin tehdä, eikä se toimisi koko valospektrin läpi.
Aluksi haluaisin asettaa tämän säteen, joka on kiinnitetty moottoreihin, ylös-alas-painikkeilla. Olisin iloinen, jos toinen moottori tasoittuisi sitten gyroskoopin kanssa samalla, kun se asennetaan, mutta ilman Arduinoa se voi olla hyvin vaikeaa.
Minusta tuntuu, että yritän tehdä niin yksinkertaista, että pääsen eroon käyttämättä Arduinoa. Ja vaadin analogia, koska rakennustyömaalla on vaikeita olosuhteita, ja minusta näyttää siltä, että mitä enemmän elektroniikkaa, sitä epäluotettavampi laite.
Se toimii vain sisätiloissa, ja laseretäisyys on enintään 10 m. Aluksi löytämälläni moottorilla on suuri virrankulutus 200mA max 2,19 A, mutta myös suuri vääntömomentti.
Virta 18 V DC Makita-akusta.
Kiitos etukäteen ehdotuksista.
Terveisiä Puolasta
Rafal
Nyytti : Minulla on hämmennystä moottorin akselien toiminnasta. Molempien moottorien kierteitetty ruuvi työntää työkalua, mutta se ei voi vetää sitä takaisin? Kuinka se toimii?
Onko mahdollista toteuttaa sama yhdellä moottorilla?
Herra. Rafal: Alemmat tasoittavat suorat olisivat ehkä 70 cm, vain pieniin huoneisiin, esim. wc, jotta pääset sisään oven kautta.
Kone ilman käyttölaitetta, käsin vedetty, vain vaakasuorat suorat. Videossa mastojen kaksi keltaista esinettä ovat laserdetektorit, jotka on kiinnitetty jäykästi suoristuksiin.
Laser seisoo jonnekin kauempana ja tuottaa vaakasuoran viivan.
Moottorit kiinnitettäisiin kärryyn ja kierteitetty ruuvi tasoitussuoriin laserilmaisimilla. Molempien sivujen tasoittamiseksi on oltava kaksi moottoria, mutta se on peilikuva.
Ainoa yhteinen osa olisi kaksikanavainen H-silta, ikään kuin tekisin sen valmiista moduulista ja mahdollisesti gyroskoopista, mutta se on unelma :).
On tärkeää, että vasemman ja oikean moottorin kierrosta varten on painike.
Menettely on tämä. Ripustan laserin esimerkiksi 2 m määritetyn lattiatason yläpuolelle. Mitaan 2 metriä lasersäteestä suoristusten alareunaan.
Säädin korkeuden painonäppäimiä kytkimiä oikealta vasemmalle niin, että se on 2 metriä suorien alareunaan nähden. Laitoin ilmaisimet mastoihin niin, että lasersäde on nollatasolla fotodiodiosien välillä. Ja loput tekevät itse
Liitteeseen laitoin piirustuksen ilmaisimen toiminnasta.
Rafal
Piirisuunnittelu

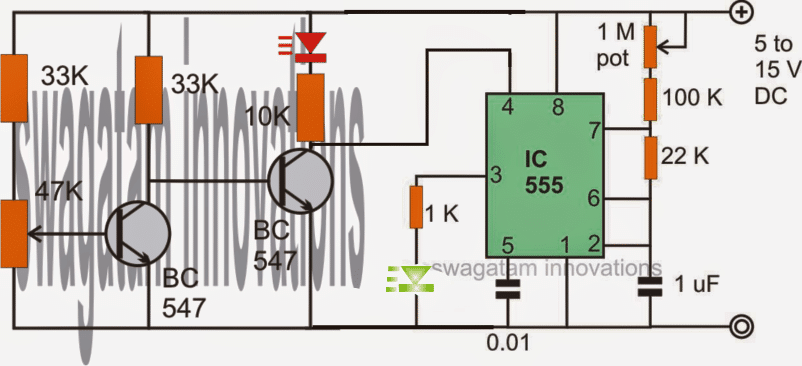
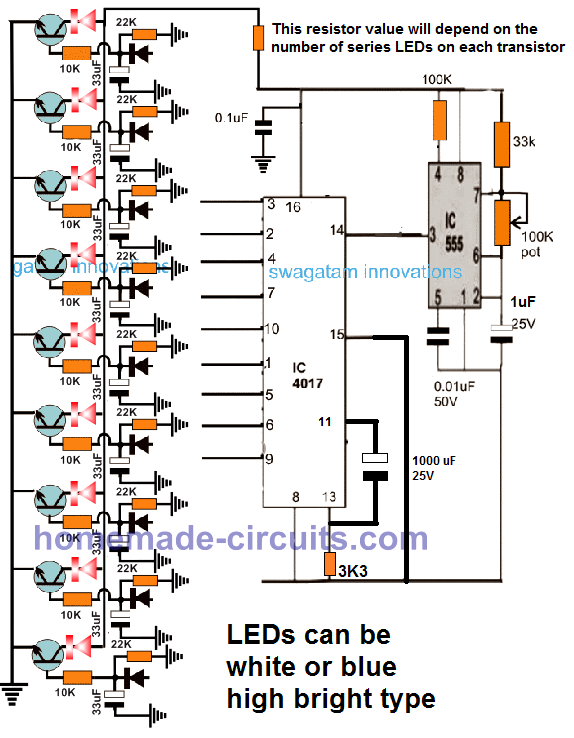
Yllä olevaa kuvaa tarkasteltaessa tarvitaan kaksi tällaista identtistä piirivaihetta siihen liittyvän moottoriohjatun työkalun havaitsemiseksi ja korjaamiseksi laserlinjan suoruuden tarkkuuden suhteen.
Kaksi identtistä vaihetta ovat toistensa peilikuvia, kuten alla on esitetty:

Piiri on melko yksinkertainen. Se toimii ikkunan vertailijan kanssa, joka varmistaa, että käyttömoottorit eivät ole toimintakunnossa, kunhan LDR-pari altistetaan samalla laserlinjan kirkkaudella.
Puolet syöttöjännitteestä syntyy sitten A1: n ei-invertoivaan tuloon ja A2: n invertoivaan tuloon.
Heti kun laserlinjan taipuma havaitaan (mikä voi tapahtua, jos moottorin ohjaama työkalu ei ole suorassa linjassa), LDR: ään R1 ja R2 vaikuttava kirkkaus muuttuu.
Tässä tilanteessa ikkuna-vertailijan tulojännite siirtyy pois puolesta syöttöjännitteestä. Tämä tilanne saa vertailulähdön komentamaan moottorisillaverkkoa liikuttamaan moottoria myötä- tai vastapäivään.
Transistorit T1. . . T4 on konfiguroitu siltaverkon tavoin moottorin kytkemisen mahdollistamiseksi eteen- ja taaksepäin riippuen LDR-valaistuksesta tai laserlinjan poikkeaman kulmasta.
Diodit D1. . . D4 on sijoitettu perumaan jännitehuiput, jotka syntyvät moottorin avtive- ja käyntiajan aikana. Esiasetettujen potentiometrien P1 ja P2 tehtävänä on helpottaa kohdistuksen säätämistä.
Näitä on hienosäädetty varmistaakseen, että moottori on täysin sammutettu ja ei-aktiivinen, kunhan vastaava LDR-pari altistetaan täsmälleen samalle laservalon kirkkaudelle.
Sanotaan esimerkiksi, että moottorilla ohjattavan työkalun väärän kohdistuksen takia laserlinjan kallistuminen aiheuttaa valon vähenemisen LDR R2: lla kuin LDR R1. Tämän seurauksena pisteen A jännite nousee yli puolet syöttöjännitteestä.
Tässä tilanteessa A1-op-vahvistimen lähtö kasvaa korkeaksi, mikä pakottaa transistorit T1 ja T4 toimimaan. Tämä puolestaan saa moottorin pyörimään kyseiseen suuntaan. Tämä toiminto siirtää liitettyä työkalua automaattisesti suoralla linjalla, kunnes sen vaakasuora kohdistustarkkuus on sama kuin laserlinjan tarkkuus.
Kääntäen, jos oletetaan, että työkalua kallistetaan vastakkaiseen suuntaan siten, että LDR: n valaistus on vastakkaista edellä esitetyllä tavalla, pisteessä A oleva jännite laskee alle puolet syöttöjännitteestä. Tämä ehto laukaisee ulostulon A2 op-vahvistimen nousevan niin, että T3 ja T2 alkavat toimia.
Tämän seurauksena moottori käy nyt vastakkaiseen suuntaan yrittäen korjata työkalun kohdistusta asiaankuuluvaan suuntaan, kunnes se muuttuu täysin suoraksi, samaan aikaan laserlinjan vaakasuoran tarkkuuden kanssa.
Ylös / Alas-painike
Ylös-alas-painikkeet vesivaakojen korkeuden esiasetusta varten voidaan yksinkertaisesti toteuttaa kytkemällä painikekytkimet rinnakkain jokaisen LDR: n kanssa.
LDR-asennus
Saadakseen oikean vastauksen LDR: stä, vasen oikea pari on asennettava putken kaltaisen kotelon sisään siten, että ne pystyvät 'näkemään' vain laservalaistuksen eikä mitään muuta ympäröivää valoa.
Idea voidaan todistaa seuraavassa kuvassa:

Täällä voimme nähdä, että LDR: t on sijoitettu hyvin lähelle toisiaan, mikä varmistaa, että kun laserlinja on tarkassa keskipisteessä, laservalo valaisee osan molemmista LDR-pareista tasaisesti.
LDR-kotelon etuosa voitaisiin peittää diffuusoidulla linssillä, jotta laservalaistus voitaisiin hajottaa sisältä tasaisesti vastaavien LDR-elementtien yli.
Pari: Yksinkertainen varkaudenesto hälytyspiiri arvokkaiden esineiden suojaamiseksi Seuraava: Yleinen BJT-, JFET- ja MOSFET-testipiiri