Lyhyt esittely robotista:
Robotti on mikä tahansa kone, joka on täysin automaattinen, ts. Se käynnistyy itsestään, päättää oman työtavansa ja pysähtyy yksin. Se on oikeastaan kopio ihmisestä, joka on suunniteltu helpottamaan ihmisen taakkaa. Sitä voidaan ohjata pneumaattisesti tai hydraulisesti tai yksinkertaisten elektronisten ohjaustapojen avulla. Ensimmäinen teollisuusrobotti oli Unimates, jonka George Devol ja Joe Engelberger rakensivat 50-luvun lopulla ja 60-luvun alussa.
Mikä tahansa robotti perustuu venäläisen tieteiskirjallisuuden kirjoittajan Isaac Asimovin määrittelemään kolmeen peruslakiin:
- Robotti ei saa vahingoittaa ihmistä suoraan tai epäsuorasti.
- Robotin tulee noudattaa ihmisten käskyjä, ellei ja kunnes se rikkoo ensimmäistä lakia.
- Robotin tulisi suojata omaa olemassaoloa, mikäli kahta ensimmäistä lakia ei rikota.

Kiinteä robotti
Robotit voivat olla kiinteitä robotteja tai mobiilirobotteja. Mobiilirobotit ovat robotteja, joilla on mobiilipohja, joka saa robotin liikkumaan vapaasti ympäristössä. Yksi edistyneistä mobiiliroboteista on Line Follower Robot. Se on pohjimmiltaan robotti, joka seuraa tiettyä polkua tai rataa ja päättää oman toimintatapansa, joka on vuorovaikutuksessa esteen kanssa. Polku voi olla musta viiva valkoisella lattialla (näkyvä) tai magneettikenttä (näkymätön). Sen sovellukset alkavat kotitalouskäytännöistä teolliseen käyttöön jne. Teollisuuden nykytilanne on, että ne kuljettavat paketteja tai materiaaleja paikasta toiseen nosturijärjestelmää käyttäen. Joskus isojen painojen nostaminen tuolloin voi aiheuttaa nostomateriaalien rikkoutumisen ja vahingoittaa myös paketteja. Robotteja seuraavaa linjaa käytetään yleisesti lasten kuljettamiseen kauppakeskusten, kodeiden, viihdepaikkojen, teollisuuden läpi. Viivan käyttö robotti ajoneuvo on kuljettaa materiaalit paikasta toiseen teollisuudenaloille. Tämä robotin liike riippuu täysin radasta. Robotti voi tehdä mitä tahansa, minkä asetit heidät tekemään. Kuten tehtaissa, heidän on vain tehtävä robotinsa valmistamalla tuotteitaan.

Mobiili robotti
Linjaseuraajarobotti
Linjaseuraajarobotti on robotti, joka seuraa tiettyä polkua, jota ohjaa takaisinkytkentämekanismi.
Peruslinjan seuraajarobotin rakentaminen:
Peruslinjaseuraajarobotin rakentaminen edellyttää seuraavia vaiheita.
- Robotin mekaanisen osan tai rungon suunnittelu
- Robottien kinematiikan määritteleminen
- Robotin ohjauksen suunnittelu

Linjaseuraajarobotti
Robotin mekaaninen osa tai runko voidaan suunnitella AutoCADin tai Workspacen avulla. Peruslinjan seuraajarobotti voi koostua jalustasta, johon pyörät on asennettu. Suorakulmaista kovamuovilevyä voidaan käyttää pohjana. Lisäksi voidaan lisätä jäykkä runko, kuten sylinteri, yhdessä muiden muotoiltujen kappaleiden kanssa, jotka ovat toisiinsa yhteydessä toisiinsa liitoksilla, ja kullakin määrätyllä liikkeellä tietyssä suunnassa. Linjaseuraajarobotti voi olla pyöräinen liikkuva robotti, jolla on kiinteä pohja, jalkainen mobiilirobotti, jossa on useita jäykkiä runkoja, jotka on kytketty yhteen nivelillä.
Seuraava vaihe sisältää robotin kinematiikan määrittelemisen. Robotin kinemaattinen analyysi sisältää sen liikkeen kuvaamisen kiinteään koordinaatistoon nähden. Se koskee lähinnä robotin liikettä ja jokaisen kehon liikettä jalkaisen robotin tapauksessa. Siihen sisältyy yleensä robotin liikkeen dynamiikka. Robotin koko lentorata asetetaan Kinematic-analyysin avulla. Tämä voidaan tehdä Workspace-ohjelmistolla.
Robotin hallinta on tärkein osa sen toimintaa. Tässä termi ohjaus viittaa robotin liikkeen ohjaukseen, ts. Pyörien liikkeen hallintaan. Peruslinjan seuraajarobotti seuraa tiettyä polkua ja robotin liikettä tällä polulla ohjataan ohjaamalla pyörien pyörimistä, jotka on asetettu kahden moottorin akselille. Joten perussäätö saavutetaan ohjaamalla moottoreita. Ohjauspiiriin kuuluu antureiden käyttö polun ja mikrokontrolleri tai mikä tahansa muu laite moottorin toiminnan ohjaamiseksi moottorin ohjaimien kautta anturin ulostulon perusteella.
2 tapaa ohjata linjaseuraajarobottia
- Ilman mikrokontrollereita

Ohjausjärjestelmän lohkokaavio
Se koostuu IR-LED- ja fotodiodijärjestelystä kullekin moottorille, jota ohjataan kytkemällä päälle ja pois päältä transistori.
IR-merkkivalo saa oikean esijännityksen aikaan infrapunavaloa. Tämä infrapunavalo heijastuu valkoisen pinnan tapauksessa ja heijastunut infrapunavalo osuu fotodiodiin. Fotodiodin vastus pienenee, mikä johtaa sen läpi kulkevan virran lisääntymiseen ja siten jännitteen pudotukseen sen yli. Fotodiodi on kytketty transistorin pohjaan ja fotodiodin yli kasvaneen jännitteen seurauksena transistori alkaa johtaa ja siten transistorin kollektoriin kytketty moottori saa riittävästi syöttöä pyörimisen aloittamiseksi. Jos jonkin anturijärjestelmän kohtaamalla polulla on musta väri, IR-valo ei heijastu ja fotodiodi tarjoaa enemmän vastusta, mikä saa transistorin pysäyttämään johtamisen ja lopulta moottori lopettaa pyörimisen.
Siksi koko järjestelmää voidaan ohjata yksinkertaisella LED-fotodiodi-transistori-järjestelyllä.
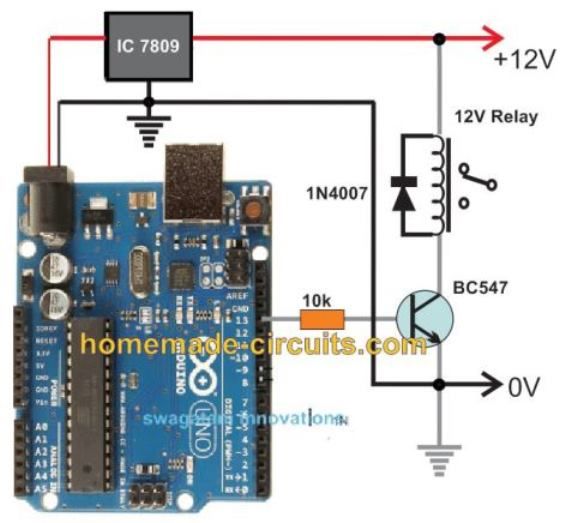
- Mikrokontrollereiden avulla
Toimintaperiaate:
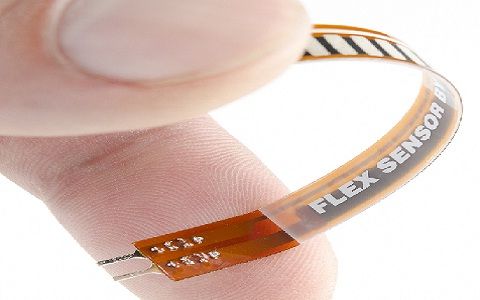
Siimalla putoava robotti on yksi itsestään toimivista robotteista. Se havaitsee ja laskeutuu alueelle piirretty viiva. Viiva on merkitty valkoisella viivalla lohkon pinnalla tai lohkoviivalla valkoisella pinnalla. Tämän järjestelmän on oltava järkevä linjalta. Tämä sovellus riippuu antureista. Tässä käytämme kahta anturia polun havaitsemiseen. Se on läheisyysanturi ja IR-anturi. Lähestymisanturi, jota käytetään polun havaitsemiseen, ja infrapunatunnistin, jota käytetään esteen havaitsemiseen. Nämä anturit asennettu robotin etupäähän. Mikrokontrolleri on älykäs laite, jota koko piiri ohjaa mikrokontrolleri.

Lohkokaavio robottiajoneuvosta, joka seuraa mikrokontrolleria
Erilaiset linjaohjatut robottiajoneuvot:
Linjaohjattuja robottiajoneuvoja on kahta tyyppiä
- Mobiilipohjainen linjaohjattu robottiauto
- RF-pohjainen linjaohjattu robottiajoneuvo
Linjaseuraajarobotin sovellukset:
- Teolliset sovellukset : Näitä robotteja voidaan käyttää automaattisina laitekantajina teollisuudessa, jotka korvaavat perinteiset kuljetinhihnat.
- Autosovellukset : Näitä robotteja voidaan käyttää myös nimellä automaattiset autot juoksemalla teillä upotetuilla magneeteilla.
- Kotimaan sovellukset : Näitä voidaan käyttää myös kodeissa kotitalouskäyttöön, kuten lattianpuhdistukseen jne.
- Ohjaussovellukset : Näitä voidaan käyttää julkisissa paikoissa, kuten ostoskeskuksissa, museoissa jne. Polkuopastuksen tarjoamiseksi.
Edut:
- Robottien liike on automaattista
- Sitä käytetään pitkän matkan sovelluksiin
- Rakennuksen yksinkertaisuus
- Sovita ja unohda-järjestelmä
- Käytetään kodin, teollisuuden automaatioissa jne.