Aikana 18thvuosisadalla, DC-moottoreiden kehitys tapahtui. DC-moottoreiden kehitys on lisääntynyt laajalti, ja niitä käytetään merkittävästi useilla toimialoilla. 1800-luvun alkupuolella ja vuonna 1832 tehdyillä parannuksilla DC-moottorit kehitti alun perin brittiläinen tutkija Sturgeon. Hän keksi DC-moottorin alkuperäisen kommutaattorityypin, jossa se pystyy myös simuloimaan koneita. Voidaan kuitenkin miettiä, mikä DC-moottorin toiminnallisuus on ja miksi on tärkeää tietää DC-moottorin nopeuden ohjauksesta. Joten tämä artikkeli selittää selvästi sen toiminnan ja erilaiset nopeudenhallintatekniikat.
Mikä on DC-moottori?
DC-moottoria käytetään tasavirralla, jossa se muuntaa vastaanotetun sähköenergian mekaaniseksi energiaksi. Tämä laukaisee pyörimismuutoksen itse laitteessa, mikä antaa voimaa käyttää erilaisia sovelluksia useilla toimialueilla.
DC-moottorin nopeuden säätö on yksi moottorin hyödyllisimmistä ominaisuuksista. Säätämällä moottorin nopeutta voit muuttaa moottorin nopeutta vaatimusten mukaisesti ja saada tarvittavan toiminnan.
Nopeuden säätömekanismia voidaan käyttää monissa tapauksissa, kuten robotti-ajoneuvojen liikkeen, moottoreiden liikkeen paperitehtaissa ja moottoreiden liikkumisen hississä, missä erityyppisiä tasavirtamoottoreita käytetään.
DC-moottorin toimintaperiaate
Yksinkertainen tasavirtamoottori toimii periaatteella, että kun virtajohdin sijoitetaan a magneettinen uskollinen d, se kokee mekaanisen voiman. Käytännöllisessä tasavirtamoottorissa ankkuri on virtaa kuljettava johdin ja kenttä tuottaa magneettikentän.
Kun johdin (ankkuri) syötetään virralla, se tuottaa oman magneettivuonsa. Magneettivuo joko summaa yhteen suuntaan suuntautuvien kenttäkäämien aiheuttaman magneettivuon tai peruuttaa kenttäkäämien aiheuttaman magneettivuon. Magneettivuon kertyminen yhteen suuntaan verrattuna toiseen aiheuttaa voimaa johtimeen, ja siksi se alkaa pyöriä.
Faradayn sähkömagneettisen induktion lain mukaan johtimen pyörivä toiminta tuottaa EMF . Tämä EMF pyrkii Lenzin lain mukaan vastustamaan syytä, ts. Syötettyä jännitettä. Täten tasavirtamoottorilla on hyvin erityisominaisuus säätää vääntömomenttinsa vaihtelevan kuormituksen takana olevasta EMF: stä johtuen.
Miksi tasavirtamoottorin nopeuden hallinta on tärkeää?
Koneen nopeuden säätö osoittaa vaikutuksen moottorin pyörimisnopeuteen, jos tämä suora vaikutus koneen toimintaan on niin tärkeää suorituskyvyn ja lopputuloksen kannalta. Poraushetkellä kaikilla materiaaleilla on oma pyörimisnopeutensa ja se muuttuu myös porakoon mukaan.
Pumppuasennusten skenaariossa läpivirtausnopeus muuttuu, joten kuljetinhihnan on oltava synkronoituna laitteen toiminnallisen nopeuden kanssa. Nämä tekijät ovat joko suoraan tai epäsuorasti riippuvaisia moottorin nopeudesta. Tämän vuoksi on otettava huomioon tasavirtamoottorin nopeus ja noudatettava erityyppisiä nopeuden säätömenetelmiä.
DC-moottorin nopeuden ohjaus tapahtuu joko työntekijän käsin tai millä tahansa automaattisella ohjaustyökalulla. Tämä näyttää olevan ristiriidassa nopeuden rajoitusten kanssa, joissa on oltava nopeuden säätö, joka vastustaa nopeuden luonnollista vaihtelua akselin kuormituksen vaihtelun vuoksi.
Nopeudenhallinnan periaate
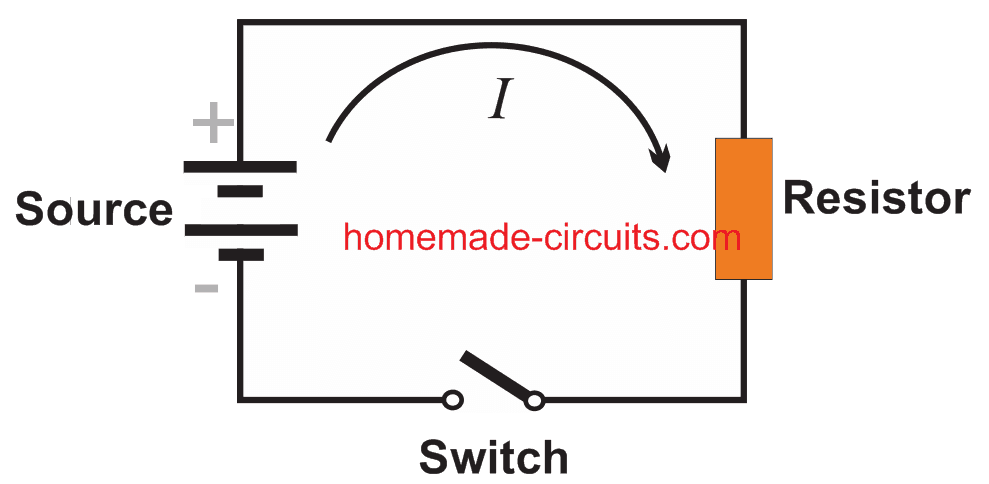
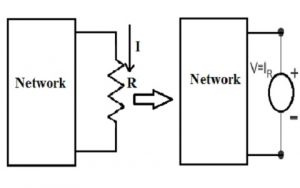
Yllä olevasta kuvasta yksinkertaisen jännitteen yhtälö DC-moottori On
V = Eb + IaRa
V on syötetty jännite, Eb on taka-EMF, Ia on ankkuri virta ja Ra on ankkuri vastus.
Tiedämme sen jo
Eb = (PøNZ) / 60A.
P - napojen lukumäärä,
A - vakio
Z - johtimien lukumäärä
N- moottorin nopeus
Korvaamalla Eb: n arvo jänniteyhtälöön saadaan
V = (PøNZ) / 60A) + IaRa
Tai V - IaRa = (PøNZ) / 60A
ts. N = (PZ / 60A) (V - IaRa) / ø
Yllä oleva yhtälö voidaan kirjoittaa myös seuraavasti:
N = K (V - IaRa) / ø, K on vakio
Tämä tarkoittaa kolmea asiaa:
- Moottorin nopeus on suoraan verrannollinen syöttöjännitteeseen.
- Moottorin nopeus on kääntäen verrannollinen ankkurijännitteen pudotukseen.
- Moottorin nopeus on käänteisesti verrannollinen virtaukseen kenttätulosten vuoksi
Täten DC-moottorin nopeutta voidaan säätää kolmella tavalla:
- Muuttamalla syöttöjännitettä
- Vaihtelemalla vuota ja vaihtelemalla virtaa kenttäkäämityksen läpi
- Muuttamalla ankkurijännitettä ja vaihtamalla ankkurin vastusta
DC-moottorin nopeuden ohjauksen useita tekniikoita
Koska DC-moottoreita on kahden tyyppisiä, keskustelemme tässä selvästi sekä DC-sarjan että shuntimoottorit.
DC-moottorin nopeuden hallinta sarjatyypeissä
Se voidaan luokitella kahteen tyyppiin, ja ne ovat:
- Ankkuriohjattu tekniikka
- Kenttäohjattu tekniikka
Ankkuriohjattu tekniikka luokitellaan edelleen kolmeen tyyppiin
- Ankkuriohjattu vastus
- Shunted ankkuri ohjaus
- Ankkuriliittimen jännite
Ankkuriohjattu vastus
Tätä tekniikkaa käytetään eniten siellä, missä säätövastuksella on sarjayhteys moottorin syöttöön. Alla oleva kuva selittää tämän.

Ankkurivastuksen hallinta
DC-sarjan moottorin säätöresistanssissa tapahtuva tehohäviö voidaan jättää huomiotta, koska tätä säätötekniikkaa käytetään enimmäkseen pitkään nopeuden vähentämiseksi kevyiden kuormitustilanteiden aikana. Se on kustannustehokas tekniikka pysyvään vääntömomenttiin, ja se toteutetaan pääasiassa nostureiden, junien ja muiden ajoneuvojen ajamisessa.
Shunted Armature Control
Tällöin reostaatti on sekä sarjassa että vaihtoyhteydessä ankkuriin. Ankkuriin kohdistuva jännitetaso muuttuu ja tämä vaihtelee sarjaa muuttamalla reostaatti . Viritysvirran muutos tapahtuu vaihtamalla shuntti-reostaattia. Tämä tekniikka nopeuden ohjaamiseksi tasavirtamoottorissa ei ole niin kallista johtuen nopeuden säätöresistanssien merkittävistä tehohäviöistä. Nopeutta voidaan säännellä jossain määrin, mutta ei normaalin nopeustason yläpuolella.

Shunted Armature DC -moottorin nopeuden säätömenetelmä
Ankkuriliittimen jännite
DC-sarjan moottorin nopeus voidaan tehdä myös moottorin virransyötön avulla käyttämällä yksilöllistä vaihtelevaa syöttöjännitettä, mutta tämä lähestymistapa on kallista eikä sitä ole toteutettu laajasti.
Kenttäohjattu tekniikka luokitellaan edelleen kahteen tyyppiin:
- Field Diverter
- Napautetun kentän hallinta (Napautetun kentän hallinta)
Field Diverter -tekniikka
Tässä tekniikassa käytetään ohjainta. Kentän poikki kulkevaa vuonopeutta voidaan vähentää vaihtamalla osa moottorivirrasta sarjakentän poikki. Pienempi on ohjaimen vastus, kenttävirta on pienempi. Tätä tekniikkaa käytetään enemmän kuin normaalilla nopeusalueella, ja se toteutetaan sähkökäyttöisissä taajuusmuuttajissa, joissa nopeus kasvaa kuormituksen vähentyessä.

Kenttäohjaimen tasavirtamoottorin nopeuden säätö
Napautetun kentän hallinta
Tässäkin pienennetään vuonopeutta, nopeutta lisätään ja se saavutetaan vähentämällä kentän käämikääntymiä siitä, mistä virran virtaus tapahtuu. Tällöin kenttäkäämityksen napautusten lukumäärä otetaan pois ja tätä tekniikkaa käytetään sähköisissä vetoissa.
DC-shuntimoottorin nopeuden säätö
Se voidaan luokitella kahteen tyyppiin, ja ne ovat:
- Kenttäohjattu tekniikka
- Ankkuriohjattu tekniikka
DC-shuntimoottorin kenttäohjausmenetelmä
Tässä menetelmässä kenttäkäämistä johtuvaa magneettivuotetta vaihdellaan moottorin nopeuden vaihtelemiseksi.
Koska magneettivuo riippuu kenttäkäämityksen läpi virtaavasta virrasta, sitä voidaan muuttaa vaihtelemalla kenttäkäämityksen läpi kulkevaa virtaa. Tämä voidaan saavuttaa käyttämällä vaihtuvaa vastusta sarjassa kenttäkäämityksen kanssa.
Aluksi, kun muuttuva vastus pidetään minimiasennossaan, nimellisvirta virtaa kenttäkäämityksen läpi nimellisjännitteen vuoksi, ja seurauksena nopeus pidetään normaalina. Kun vastusta lisätään vähitellen, kenttäkäämityksen virta vähenee. Tämä puolestaan vähentää tuotettua virtausta. Siten moottorin nopeus kasvaa normaaliarvonsa ylitse.
DC-shuntimoottorin ankkurivastuksen säätötapa
Tällä menetelmällä tasavirtamoottorin nopeutta voidaan säätää säätämällä ankkurivastusta armatuurin jännitteen pudotuksen säätämiseksi. Tässä menetelmässä käytetään myös muuttuvaa vastusta sarjassa ankkurin kanssa.
Kun muuttuva vastus saavuttaa vähimmäisarvonsa, ankkuriresistanssi on normaalilla, ja siksi ankkurijännite laskee. Kun vastusarvoa nostetaan vähitellen, ankkuri ylittää jännitteen. Tämä puolestaan johtaa moottorin nopeuden laskuun.
Tällä menetelmällä saavutetaan moottorin nopeus normaalin alueen alapuolella.
DC-shuntimoottorin ankkurijännitteen säätömenetelmä (Ward Leonard -menetelmä)
Ward Leonardin tekniikka DC-moottorin nopeuden säätöpiiri näkyy seuraavasti:
Yllä olevassa kuvassa M on päämoottori, jossa sen nopeutta on säädettävä, ja G vastaa yksilöllisesti viritettyä tasavirta-generaattoria, jossa sitä käytetään kolmivaiheisella moottorilla ja se voi olla joko synkroni- tai induktiomoottoria. Tätä DC-generaattorin ja vaihtovirtakäyttöisen moottoriyhdistelmän mallia kutsutaan nimellä M-G.
Generaattorin jännitettä muutetaan muuttamalla generaattorin kenttävirtaa. Tätä jännitetasoa vaihdettaessa DC-moottorin ankkuriosaan ja sitten M vaihtelee. Moottorikentän virtauksen pitämiseksi vakiona moottorikentän virta on pidettävä vakiona. Kun moottorin nopeutta säädetään, moottorin ankkurivirran on oltava sama kuin nimellistason.
Toimitettu kenttävirta on erilainen siten, että jännitteen ankkuritaso vaihtelee arvosta 0 nimellistasoon. Koska nopeuden säätö vastaa nimellisvirtaa ja moottorin pysyvää kenttävirtausta ja kenttävirtaa siihen asti, kunnes nimellisnopeus saavutetaan. Ja koska teho on nopeuden ja vääntömomentin tulo ja sillä on suora suhde nopeuteen. Kun teho kasvaa, nopeus kasvaa.
Molemmat edellä mainitut menetelmät eivät voi tarjota nopeuden hallintaa toivotulla alueella. Lisäksi vuonohjausmenetelmä voi vaikuttaa kommutointiin, kun taas ankkuriohjausmenetelmään liittyy valtava tehohäviö, koska siinä käytetään vastusta sarjassa ankkurin kanssa. Siksi on usein toivottavaa erilainen menetelmä - menetelmä, joka ohjaa syöttöjännitettä moottorin nopeuden säätämiseksi.
Tämän seurauksena Ward Leonard -tekniikalla säädettävä voimansiirto ja vääntömomentin vakioarvo saavutetaan miniminopeustasosta perusnopeuden tasoon. Kenttävirtauksen säätötekniikkaa käytetään pääasiassa silloin, kun nopeuden taso on suurempi kuin perusnopeuden.
Tässä toiminnallisuudessa ankkurivirta pidetään vakiona määritetyllä arvolla ja generaattorin jännitteen arvo pidetään vakiona. Tällaisessa menetelmässä kenttäkäämi saa kiinteän jännitteen ja ankkuri muuttuvan jännitteen.
Yksi tällainen jännitteenohjausmenetelmän tekniikka sisältää kytkinmekanismin käytön vaihtelevan jännitteen aikaansaamiseksi ankkurille, ja toinen käyttää vaihtovirtamoottorikäyttöistä generaattoria antamaan vaihtelevan jännitteen ankkurille ( Ward-Leonard-järjestelmä ).
edut ja haitat seurakunnan Leonard metho d ovat:
Ward Leonard -tekniikan käytöstä DC-moottorin nopeuden ohjauksessa on seuraavat edut:
- Molempiin suuntiin voidaan ohjata laitteen nopeutta sujuvasti pitkällä alueella
- Tällä tekniikalla on luonnollinen jarrutuskyky
- Takana olevat reaktiiviset voltin ampeerit tasapainotetaan taajuusmuuttajan kautta ja voimakkaasti viritelty synkronimoottori toimii taajuusmuuttajana, joten tehokerroin kasvaa
- Kun kuormitus vilkkuu, käyttömoottori on induktiomoottori vauhtipyörällä, jota käytetään vähentämään vilkkuvaa kuormaa minimitasolle
Ward Leonard -tekniikan haitat ovat:
- Koska tällä tekniikalla on joukko moottoreita ja generaattoreita, kustannukset ovat enemmän
- Laite on monimutkainen suunnitella ja siinä on myös raskas paino
- Tarvitset enemmän tilaa asennusta varten
- Vaatii säännöllistä huoltoa ja perustus ei ole kustannustehokasta
- Tulee suuria tappioita, joten järjestelmän tehokkuus heikkenee
- Lisää melua syntyy
Ja Ward Leonard -menetelmän soveltaminen on tasainen nopeuden säätö tasavirtamoottorissa. Muutamia esimerkkejä ovat kaivinkoneet, paperitehtaat, hissit, valssaamot ja nosturit.
Näiden kahden tekniikan lisäksi yleisimmin käytetty tekniikka on DC-moottorin nopeuden säätö PWM: n avulla DC-moottorin nopeuden säätämiseksi. PWM sisältää vaihtelevia pulsseja moottorikäyttöön moottoriin kohdistetun jännitteen säätämiseksi. Tämä menetelmä osoittautuu erittäin tehokkaaksi, koska tehohäviöt pidetään minimissä, eikä se sisällä monimutkaisten laitteiden käyttöä.

Jännitteen säätömenetelmä
Yllä oleva lohkokaavio edustaa yksinkertaista sähkömoottorin nopeuden säädin . Kuten yllä olevassa lohkokaaviossa on esitetty, mikrokontrolleria käytetään syöttämään PWM-signaaleja moottoriohjaimelle. Moottorin ohjain on L293D IC, joka koostuu H-siltapiireistä moottorin käyttämiseksi.
PWM saavutetaan vaihtelemalla moottorin ohjain-IC: n aktivointitappiin kohdistettuja pulsseja moottorin käytetyn jännitteen säätämiseksi. Pulssien vaihtelu tapahtuu mikro-ohjaimella, tulosignaali painikkeista. Tässä on kaksi painonappia, joista kukin vähentää ja lisää pulssien käyttöjaksoa.
Joten tämä artikkeli on antanut yksityiskohtaisen selityksen DC-moottorin nopeuden ohjauksen eri tekniikoista ja siitä, kuinka nopeuden hallintaa on tärkeintä noudattaa. Lisäksi on suositeltavaa tietää 12 V DC-moottorin nopeuden säädin .