Tässä projektissa opimme servomoottorin perustiedot ja kuinka servomoottoria käytetään 555 ajastimen IC: llä ja muutamalla painikkeella.
Kirjoittanut Ankit Negi
MIKSI SERVO?
Servomoottorit käytetään useilla aloilla. Näitä käytetään pääasiassa toimilaitteina alueilla, joilla tarvitsemme tarkan liikkeen lähtökuorman hallitsemiseksi.
Paras esimerkki on RC-auto. Katsotaanpa, että haluat 45 asteen liikkeen, ei enemmän eikä vähemmän. Siinä tapauksessa et voi käyttää yksinkertaista tasavirtamoottoria, koska se ylittää halutun sijainnin joka kerta, kun käynnistät sen.
Ja tämän vuoksi tarvitsemme servomoottorin tämän tehtävän saavuttamiseksi, koska se ei ainoastaan pyöri tarkasti 45 astetta, vaan pysähtyy myös sujuvasti haluttuun asentoon.

Muutama tekninen kohta on tiedettävä:
A) Ennen kuin ostat tai käytät servoa, sinun on tiedettävä, mitä siinä on ja miten se toimii. servomoottori koostuu kolmesta pääkomponentista:
1. DC-moottori
2. 1 Potentiometri, joko analoginen tai digitaalinen
3. Ohjauspiiri
B) Servomoottorista tulee yhteensä 3 johtoa:
1. PUNAINEN: Tarjontaan positiivinen
2. MUSTA: negatiiviseen tarjontaan
3. ORANSSI TAI KELTAINEN: Yhdistetty referenssijännitteeseen, ts. Pwm-lähteeseen
C) Servomoottori voi pyöriä 90 astetta kumpaankin suuntaan, peittäen enintään 180 astetta eli 90 astetta myötäpäivään tai 90 astetta vastapäivään neutraalista asennostaan.
Moottorin pyörittämiseksi myötäpäivään kellosignaalin on oltava yli 1,5 millisekuntia ja pyörittämään sitä vastapäivään alle 1,25 millisekuntia, mutta taajuuden tulisi olla välillä 50-60 Hertz.
Ja siten aiomme käyttää 555-ajastinta sellaisten kellopulssien luomiseen meille.
TÄTÄ PROJEKTIA KOSKEVAT KOMPONENTIT:
1. SERVO-MOOTTORI
kaksi. 555 AJASTIN
3. 6 voltin akku
4. KAKSI PAINIKETTA
5. VASTAT: 1K, 4,7K, 33K, 10K, 68K, kaikki 1/4 wattia 5%
6. YKSI TRANSISTORI (BC547)
7. Kaksi 0,1 kond. Kondensaattoria
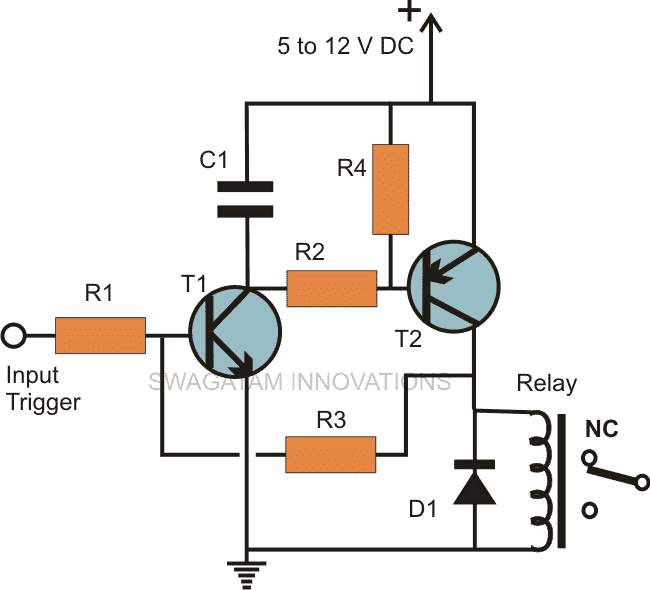
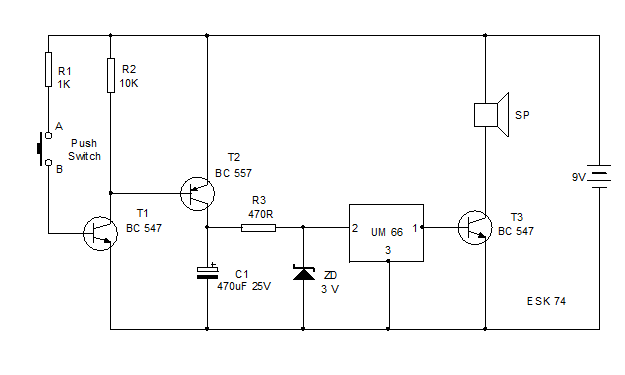
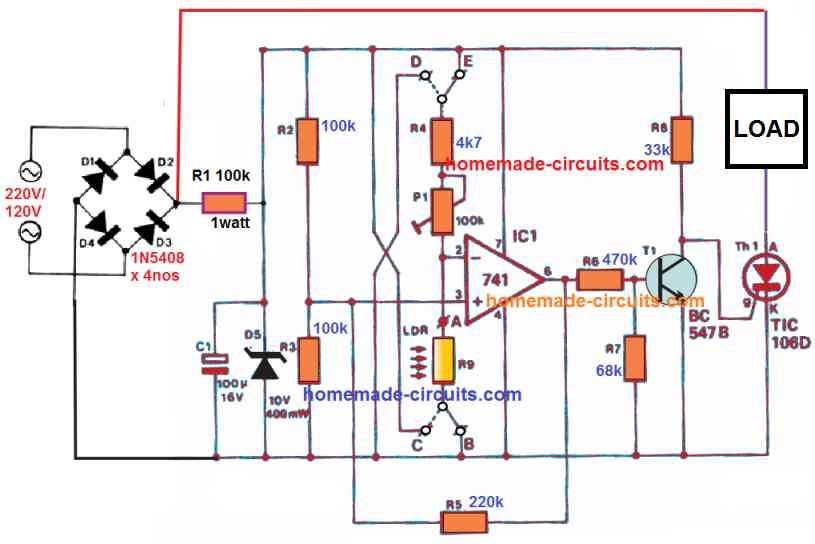
VIRTAKAAVIO, JOS KÄYTTÄÄ PALVELUMOOTTORIN AJOA IC 555: N avulla:

Tee liitännät yllä olevan piirikaavion mukaisesti.
Liitä moottorin positiivinen ja negatiivinen nasta akun positiiviseen ja negatiiviseen napaan. Ja kytke signaali tai referenssitappi transistorin kollektoriliittimeen.
PIIRIN TOIMINTA:
1. Kun eteenpäin painettavaa painiketta painetaan
Kun tämä tapaus ilmenee, 68 K: n vastus kytkeytyy purkauksen ja kynnystapin väliin. Aluksi kondensaattoria ei ole ladattu, joten nasta 2 on 0 voltilla, joka on alle 1/3 käytetystä jännitteestä.
Tämä nollaa kiikun 555 sisällä ja antaa logiikan 1 lähtöliittimessä, johon transistorin pohja on kytketty.
Tämä saa transistorin käynnistymään ja johtamaan virtaa suoraan maahan, mikä moottorin signaalitappi saa nollan voltin, koska tämä tappi on kytketty suoraan kollektoriliittimeen.
Koska kondensaattori alkaa latautua, kun lähtö on 1, ulostuloksi tulee 0, kun jännite kondensaattorin yli kasvaa yli 2/3 käytetystä jännitteestä, kun se on kytketty suoraan kynnystappiin.
Nyt transistori on pois päältä ja signaalitappi saa logiikan 1.
Tällä tavalla pwm-signaalit syntyvät moottorin vertailutapissa. Nyt tässä tapauksessa generoidun pulssin aikajakso on yli 1,5 millisekuntia, jonka voit laskea 555: n käyttöjaksokaavalla. Ja näin saamme moottorin 90 asteen pyörimisen myötäpäivään, kuten edellisessä kappaleessa on selitetty.
1. Kun taaksepäin olevaa painiketta painetaan-
Kun tämä tapaus ilmenee, 10 K vastus kytkeytyy purkauksen ja kynnysnastan väliin, joka on alle 68 k ohmin vastus. Siksi tässä tapauksessa pulssin päälläoloaika on oppitunti yli 1,5 millisekuntia, jonka voit laskea käyttöjaksokaavalla 555.
Nyt pwm syntyy moottorin vertailutappiin samalla tavalla kuin edellisessä tapauksessa. Ja näin saamme moottorin 90 asteen vastapäivään pyörimisen, kuten edellä kappaleessa selitetään.
** Molemmissa tapauksissa taajuus on välillä 40-60 hertsiä
Edellinen: 2,4 GHz 10-kanavainen kaukosäätimen kytkin Seuraava: Kompakti 3-vaiheinen IGBT-ohjain IC STGIPN3H60 - Datalehti, Pinout