Tämä robottivarren piiri, joka voidaan toteuttaa myös robotinosturin tavoin, toimii kuudella servomoottorilla ja sitä voidaan ohjata mikro-ohjaimen kaukosäädin , käyttämällä Arduino-pohjaista 2,4 GHz: n tietoliikenneyhteyttä.
Pääpiirteet
Kun rakennat jotain niin hienostunutta kuin robotti käsivarsi, sen on näytettävä modernilta ja sen on sisällettävä monia edistyneitä ominaisuuksia, eikä vain pelkkä lelu, kuten toiminnot.
Ehdotettu täysimittainen rakenne on suhteellisen helppo rakentaa, mutta siihen liittyy joitain edistyneitä ohjaustoimintoja, joita voitaisiin hallita tarkasti langattomilla tai kauko-ohjatuilla komennoilla. Rakenne on jopa yhteensopiva teolliseen käyttöön, jos moottoreita päivitetään sopivasti.
Tämän mekaanisen nosturin, kuten robottivarren, pääominaisuudet ovat:
- Portaattomasti säädettävä 'varsi' yli 180 asteen pystyakselin.
- Jatkuvasti säädettävä 'kyynärpää' 180 asteen pystyakselin yli.
- Jatkuvasti säädettävä sormenpuristus tai kahva 90 asteen pystyakselin yli.
- Jatkuvasti säädettävä 'varsi' 180 asteen vaakatasossa.
- Koko robottijärjestelmä tai nosturin varsi on liikuteltavissa ja ohjattavissa kuten a kauko-ohjattava auto .
Karkea työskentelysimulaatio
Muutamia yllä selitetyistä ominaisuuksista voidaan tarkastella ja ymmärtää seuraavan GIF-simulaation avulla:

Moottorimekanismin paikat
Seuraava kuva antaa meille selkeän kuvan moottorin eri asennoista ja niihin liittyvistä vaihdemekanismeista, jotka on asennettava projektin toteuttamiseksi:

Tässä suunnittelussa pidämme asiat mahdollisimman yksinkertaisina, jotta maallikko pystyy ymmärtämään mukana olevat moottori / vaihdemekanismit. mikään ei jää piiloon monimutkaisten mekanismien taakse.
Kunkin moottorin toiminta tai toiminta voidaan ymmärtää seuraavien kohtien avulla:
- Moottori # 1 ohjaa robotin 'sormenpuristusta' tai tartuntajärjestelmää. Liikkuva elementti on suoraan saranoitu moottorin akselilla liikkeitä varten.
- Moottori # 2 ohjaa järjestelmän kyynärmekanismia. Se on konfiguroitu yksinkertaisella reuna-egde-vaihteistolla nostoliikkeen toteuttamiseksi.
- Moottori # 3 on vastuussa koko robottivarsijärjestelmän nostamisesta pystysuoraan, joten tämän moottorin on oltava tehokkaampi kuin kaksi edellä mainittua. Tämä moottori on integroitu myös vaihdemekanismilla tarvittavien toimenpiteiden suorittamiseksi.
- Moottori # 4 ohjaa koko nosturimekanismia koko 360 asteen vaakatasossa niin, että varsi pystyy valitsemaan tai nostamaan minkä tahansa esineen täydellä myötä- tai vastapäivään säteittäinen alue.
- Moottorit 5 ja 6 toimivat kuin koko järjestelmän kuljettavan korin pyörät. Näitä moottoreita voidaan ohjata siirtämällä järjestelmää vaivattomasti paikasta toiseen, ja se myös helpottaa järjestelmän itä / länsi, pohjoinen / etelä -liikennettä yksinkertaisesti säätämällä vasemman / oikean moottorin nopeuksia. Tämä tehdään yksinkertaisesti vähentämällä tai pysäyttämällä toinen moottoreista, esimerkiksi oikeanpuoleisen käännöksen aloittamiseksi, oikeanpuoleinen moottori voidaan pysäyttää tai pysäyttää, kunnes käännös toteutetaan kokonaan tai haluttuun kulmaan. Samoin vasemman käännöksen aloittamiseksi tee sama vasemman moottorin kanssa.
Takapyörään ei ole liitetty moottoria, se on saranoitu liikkumaan vapaasti keskiakselillaan ja seuraamaan etupyörän liikkeitä.
Langaton vastaanotinpiiri
Koska koko järjestelmä on suunniteltu toimimaan kauko-ohjaimen kanssa, langaton vastaanotin on määritettävä yllä selitetyillä moottoreilla. Ja tämä voidaan tehdä käyttämällä seuraavaa Arduino-pohjaista piiriä.

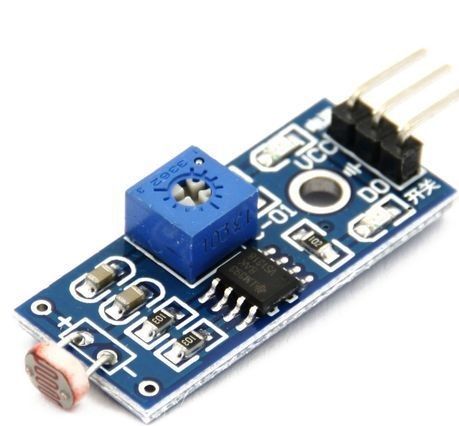
Kuten näette, Arduino-ulostuloihin on kytketty 6 servomoottoria, joita kutakin ohjataan liitetyn anturin NRF24L01 kaappaamien kauko-ohjattavien signaalien kautta.
Tämä anturi käsittelee signaalit ja syötetään Arduinoon, joka toimittaa prosessoinnin kyseiselle moottorille aiottua nopeuden säätöoperaatiota varten.
Signaalit lähetetään lähetinpiiristä, jossa on potentiometrit. Näiden potentiometrien säätö säätelee edellä selitetyllä vastaanotinpiirillä kiinnitettyjen vastaavien moottoreiden nopeustasoja.
Katsotaan nyt, kuinka lähetinpiiri näyttää:
Lähetinmoduuli

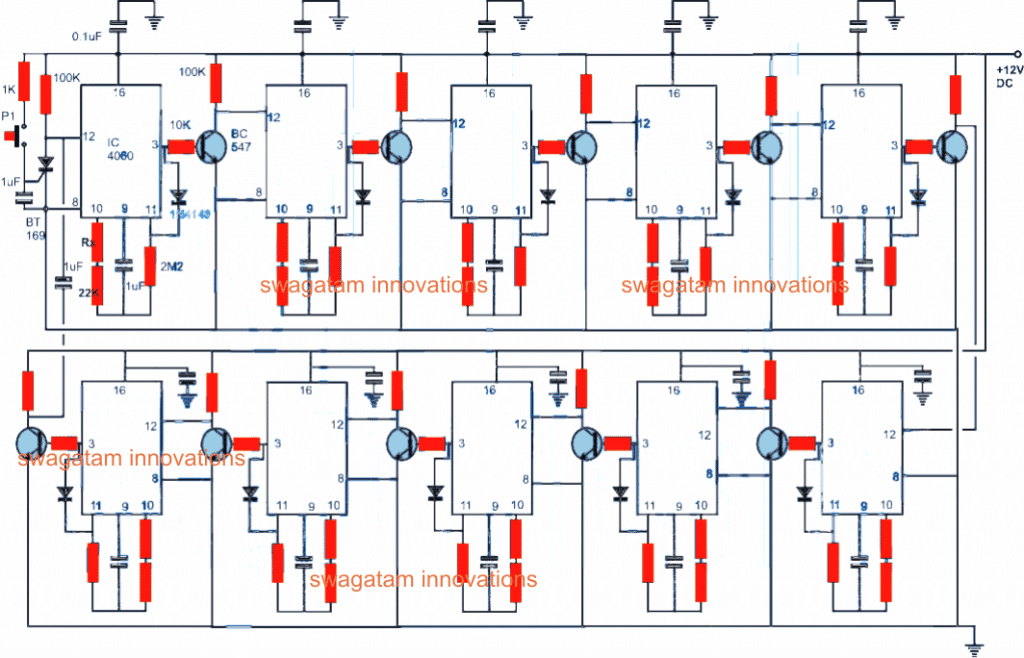
Lähettimen suunnittelussa voidaan nähdä 6 potentiometriä kiinnitettynä Arduino-korttiin ja myös toiseen 2,4 GHz: n tiedonsiirtolinkkilaitteeseen.
Jokainen potista on ohjelmoitu vastaavan moottorin ohjaaminen liittyvät vastaanotinpiiriin. Siksi, kun käyttäjä kiertää lähettimen valitun potentiometrin akselia, vastaava robottivarren moottori alkaa liikkua ja toteuttaa toimintoja riippuen sen erityisestä sijainnista järjestelmässä.
Moottorin ylikuormituksen hallinta
Saatat ihmetellä, miten moottorit rajoittavat liikkumistaan liikkuvien alueidensa yli, koska järjestelmässä ei ole mitään rajoitinjärjestelyä estämään moottoria ylikuormittamasta vastaavien mekanismiliikkeiden saavuttaessa maalipisteet?
Tarkoittaako esimerkiksi sitä, mitä tapahtuu, jos moottoria ei pysäytetä edes sen jälkeen, kun 'ote' on pitänyt esinettä tiukasti?
Helpoin ratkaisu tähän on lisätä yksilö nykyiset ohjausmoduulit jokaisen moottorin kanssa niin, että moottori pysyy sellaisissa tilanteissa kytkettynä päälle ja lukittu polttamatta tai ylikuormittamatta.
Aktiivisen virranhallinnan takia moottorit eivät käy läpi ylikuormitusta tai ylivirtaolosuhteita, ja ne jatkavat toimintaansa tietyllä turvallisella alueella.
Löydät täydellisen ohjelmakoodin tässä artikkelissa
Edellinen: USB 5V -vahvistin PC-kaiuttimille Seuraava: Tutkittu 7 modifioitua siniaaltoinvertteripiiriä - 100 W - 3 kVA