Esitetty 3-vaiheinen VFD-piiri ( minun suunnitellut ) voidaan käyttää minkä tahansa kolmivaiheisen harjatun vaihtovirtamoottorin tai jopa harjattoman vaihtovirtamoottorin nopeuden säätämiseen. Idean pyysi Tom
VFD: n käyttö
Ehdotettua 3-vaiheista VFD-piiriä voidaan yleisesti soveltaa useimpiin 3-vaiheisiin vaihtovirtamoottoreihin, joissa säätötehokkuus ei ole liian kriittinen.
Sitä voidaan käyttää nimenomaan ohjaukseen oravan häkin induktiomoottorin nopeus avoimen piirin tilassa, ja mahdollisesti myös suljetun silmukan tilassa, josta keskustellaan artikkelin myöhemmässä osassa.
3-vaihemuuntajalle vaadittavat moduulit
Ehdotetun kolmivaiheisen VFD-taajuusmuuttajan tai vaihtelevan taajuuden käyttöpiirin suunnittelussa tarvitaan olennaisesti seuraavat peruspiirin vaiheet:
- PWM-jänniteohjaimen piiri
- 3-vaiheinen korkea / matala H-sillan ohjainpiiri
- 3 Vaihegeneraattorin piiri
- Jännite taajuusmuuttajapiiriin V / Hz-parametrin muodostamiseksi.
Oppitaan yllä olevien vaiheiden toiminnalliset yksityiskohdat seuraavan selityksen avulla:
Yksinkertainen PWM-jänniteohjaimen piiri voidaan nähdä alla olevasta kaaviosta:

PWM-ohjain
Olen jo sisällyttänyt ja selittänyt yllä olevan PWM-generaattorivaiheen toiminnan, joka on periaatteessa suunniteltu generoimaan vaihteleva PWM-lähtö IC2: n pin3: n yli vasteena potentiaalille, jota käytetään saman IC: n pin5: ssä.
Kaaviossa esitetty 1K-esiasetus on RMS-säätönuppi, joka voidaan sopivasti säätää halutun suhteellisen määrän lähtöjännitteen saamiseksi PWM: ien muodossa IC2: n nastalla 3 jatkokäsittelyä varten. Tämä on asetettu tuottamaan vastaava lähtö, joka voi olla sama kuin verkkovirran 220 V tai 120 V AC RMS.
H-Bridge-ohjainpiiri
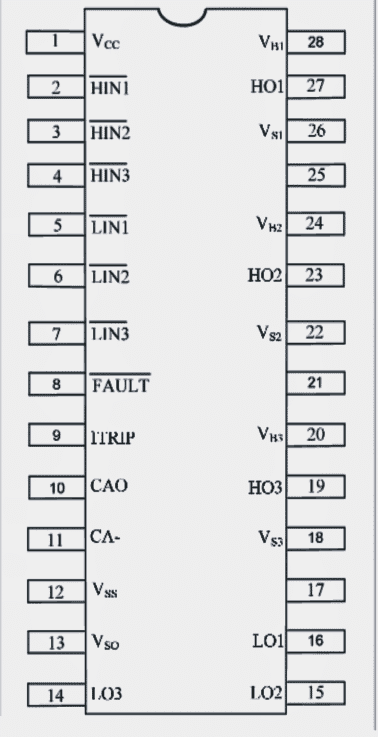
Seuraava alla oleva kaavio näyttää yhden sirun H-sillan 3-vaiheen ohjainpiirin IC IRS2330: n avulla.
Suunnittelu näyttää suoraviivaiselta, koska suurin osa monimutkaisuuksista hoidetaan sirujen sisäänrakennetuissa hienostuneissa piireissä.
Hyvin laskettu 3-vaiheinen signaali syötetään IC: n HIN1 / 2 / 3- ja LIN1 / 2/3-tulojen yli 3-vaiheisen signaaligeneraattorin vaiheen kautta.
Lähdöt IC IRS2330 voidaan nähdä integroituna kuuteen mosfetiin tai IGBT: n siltaverkkoon, joiden viemärit on määritetty asianmukaisesti ohjattavan moottorin kanssa.
Matalan sivun mosfet / IGBT-portit on integroitu yllä käsitellyn PWM-generaattoripiirin vaiheen IC2-napaan # 3 PWM-injektion aloittamiseksi sillan mosfet-vaiheeseen. Tämä säätö auttaa lopulta moottoria saavuttamaan halutun nopeuden asetusten mukaisesti (ensimmäisessä kaaviossa esiasetetun 1 k: n kautta).

Seuraavassa kaaviossa visualisoidaan vaadittu 3-vaiheinen signaaligeneraattoripiiri.

3-vaiheisen generaattoripiirin määrittäminen
3-vaiheinen generaattori on rakennettu parin CMOS-sirun CD4035 ja CD4009 ympärille, joka tuottaa tarkasti mitoitetut 3-vaihesignaalit esitettyjen pinoutien yli.
3-vaihesignaalien taajuus riippuu syötetyistä tulokelloista, joiden tulisi olla kuusi kertaa aiottu 3-vaiheinen signaali. Jos vaadittu 3-vaiheinen taajuus on 50 Hz, tulokellon tulisi olla 50 x 6 = 300 Hz.
Se merkitsee myös, että edellä mainittuja kelloja voitaisiin muuttaa kuljettajan IC: n tehollisen taajuuden vaihtelemiseksi, mikä puolestaan olisi vastuussa moottorin toimintataajuuden vaihtelusta.
Koska edellä mainitun taajuusmuutoksen on kuitenkin oltava automaattinen vasteena vaihtelevalle jännitteelle, jännitteestä taajuusmuuttajaan on välttämätöntä. Seuraava vaihe käsittelee yksinkertaisen tarkan jännitteen ja taajuusmuuttajan piirin tarvittavaa toteutusta varten.
Kuinka luoda vakio V / F-suhde
Tyypillisesti induktiomoottoreissa moottorin nopeuden ja vääntömomentin optimaalisen tehokkuuden ylläpitämiseksi liukunopeutta tai roottorin nopeutta on kontrolloitava, mikä puolestaan on mahdollista ylläpitämällä vakio V / Hz-suhde. Koska staattorin magneettivuo on aina vakio sisääntulotaajuudesta riippumatta, roottorin nopeutta voidaan helposti säätää pitämällä V / Hz-suhde vakiona .
Avoimen silmukan tilassa tämä voidaan tehdä karkeasti ylläpitämällä ennalta määrätyt V / Hz-suhteet ja toteuttamalla se manuaalisesti. Esimerkiksi ensimmäisessä kaaviossa tämä voidaan tehdä säätämällä R1- ja 1K-esiasetuksia sopivasti. R1 määrittää taajuuden ja 1K säätää lähdön tehollisarvoa, joten säätämällä kahta parametria sopivasti voimme saavuttaa vaaditun määrän V / Hz manuaalisesti.
Induktiomoottorin vääntömomentin ja nopeuden suhteellisen tarkan hallinnan saavuttamiseksi meidän on kuitenkin toteutettava suljetun silmukan strategia, jossa luistonopeustiedot on syötettävä prosessointipiiriin V / Hz-suhteen automaattista säätöä varten, jotta tämä arvo pysyy aina lähellä vakiota.
Suljetun silmukan palautteen toteuttaminen
Tämän sivun ensimmäistä kaaviota voidaan muokata sopivasti suljetun piirin automaattisen V / Hz-säädön suunnittelua varten alla esitetyllä tavalla:

Yllä olevassa kuvassa IC2: n tapin # 5 potentiaali määrittää SPWM: n leveyden, joka syntyy saman IC: n tapissa # 3. SPWM muodostetaan vertaamalla verkkovirran 12 V: n aaltoilunäytettä tapissa # 5 kolmiotaalloon IC2: n tapissa # 7, ja tämä syötetään moottorin ohjausta varten matalille sivuille.
Aluksi tämä SPWM asetetaan jollekin säädetylle tasolle (käyttäen 1K perset), joka laukaisee 3-vaiheisen sillan matalat IGBT-portit roottorin liikkeen aloittamiseksi määritetyllä nimellisnopeustasolla.
Heti kun roottorin roottori alkaa pyöriä, kiinnitetty kierroslukumittari roottorimekanismin kanssa saa aikaan suhteellisen ylimääräisen jännitteen määrän kehittymään IC2: n tapissa # 5, mikä saa SPWM: t laajenemaan aiheuttaen enemmän jännitettä moottorin staattorikäämeihin. Tämä lisää roottorin nopeuden lisäystä aiheuttaen enemmän jännitettä IC2: n tapissa # 5, ja tämä jatkuu, kunnes SPWM: n ekvivalenttijännite ei enää pysty kasvamaan ja staattorin roottorin synkronointi saavuttaa vakaan tilan.
Edellä mainittu menettely jatkuu itsesäätöön moottorin koko käyttöjakson ajan.
Kuinka tehdä ja integroida kierroslukumittari
Yksinkertainen kierroslukumittarin rakenne voidaan nähdä seuraavasta kaaviosta, joka voidaan integroida roottorimekanismin kanssa siten, että pyörimistaajuus pystyy syöttämään BC547: n pohjan.

Täällä roottorin nopeustiedot kerätään Hall-efektianturista tai IR LED / Sensor -verkosta ja syötetään T1: n tukiasemaan.
T1 värähtelee tällä taajuudella ja aktivoi kierroslukumittarin piirin, joka on tehty konfiguroimalla IC 555 monostabiili piiri asianmukaisesti.
Yllä olevan kierroslukumittarin lähtö vaihtelee suhteessa tulotaajuuteen T1: n pohjalla.
Kun taajuus nousee, jännite oikealla puolella D3-lähtö myös nousee ja päinvastoin, ja auttaa pitämään V / Hz-suhteen suhteellisen vakiona.
Kuinka hallita nopeutta
Moottorin nopeus vakiolla V / F voidaan saavuttaa muuttamalla taajuusmuuttoa IC 4035: n kellotulossa. Tämä voidaan saavuttaa syöttämällä vaihteleva taajuus IC 555 -taulukosta tai mistä tahansa tavallisesta astable-piiristä kellotuloon. IC 4035.
Taajuuden muuttaminen muuttaa tehokkaasti moottorin toimintataajuutta, mikä alentaa vastaavasti luistonopeutta.
Tämä havaitaan kierroslukumittarilla, ja kierroslukumittari pienentää suhteellisesti IC2: n tapissa # 5 olevaa potentiaalia, mikä puolestaan vähentää moottorin SPWM-pitoisuutta suhteellisesti, minkä seurauksena moottorin jännite pienenee, mikä varmistaa moottorin nopeuden vaihtelun oikein vaadittu V / F-suhde.
Kotitekoinen V-muunnin

Edellä olevassa jännitteestä taajuusmuuttajapiiriin käytetään IC 4060: ta ja sen taajuuteen riippuvaan resistanssiin vaikuttaa LED / LDR-kokoonpano aiottuihin muunnoksiin.
LED / LDR-kokoonpano on tiivistetty valonkestävän kotelon sisään, ja LDR on sijoitettu IC: n 1 M: n taajuudesta riippuvan vastuksen yli.
Koska LDR / LDR-vaste on melko lineaarinen, LDR: n vaihteleva LED-valaistus tuottaa suhteellisesti vaihtelevan (kasvavan tai laskevan) taajuuden IC: n pin3: n yli.
Vaiheen FSD- tai V / Hz-alue voidaan asettaa asettamalla asianmukaisesti 1 M vastus tai jopa C1-arvo.
LED on jännite, joka johdetaan ja valaistaan PWM: ien kautta ensimmäisestä PWM-piirivaiheesta. Se tarkoittaa, että kun PWM: t vaihtelevat, myös LED-valaistus vaihtelee, mikä puolestaan aiheuttaisi suhteellisen kasvavan tai pienenevän taajuuden IC 4060: n pin3: lla yllä olevassa kaaviossa.
Muuntimen integrointi VFD: hen
Tämä vaihteleva taajuus IC 4060: sta on nyt yksinkertaisesti integroitava 3-vaiheisen generaattorin IC CD4035 -kellotuloon.
Yllä olevat vaiheet muodostavat pääosat 3-vaiheisen VFD-piirin valmistamiseksi.
Nyt olisi tärkeää keskustella DC-väylästä, jota tarvitaan IGBT-moottorin ohjaimien toimittamiseen, ja koko suunnittelun menettelytavoista.
IGBT H-sillan kiskojen yli syötetty DC-väylä voidaan saada oikaisemalla käytettävissä oleva 3-vaiheinen verkkotulo käyttämällä seuraavaa piirikokoonpanoa. IGBT DC BUS -kaiteet on kytketty kuormana merkittyjen pisteiden yli

Yksivaiheiselle lähteelle korjaus voidaan toteuttaa käyttämällä standardin mukaista 4 diodin siltaverkkokokoonpanoa.
Ehdotetun kolmivaiheisen VFD-piirin asettaminen
Se voidaan tehdä seuraavien ohjeiden mukaisesti:
Kun DC-väyläjännite on kohdistettu IGBT: n poikki (ilman moottoria kytkettynä), säädä PWM 1k: n esiasetusta, kunnes kiskojen yli oleva jännite on yhtä suuri kuin aiotut moottorin jännitetiedot.
Seuraavaksi säädä IC 4060 1M -esiasetusta minkä tahansa IC IRS2330 -tulon säätämiseksi vaaditulle oikealle taajuustasolle annettujen moottorimääritysten mukaisesti.
Kun yllä olevat toimenpiteet on suoritettu, määritetty moottori voidaan kytkeä ja syöttää erilaisilla jännitetasoilla, V / Hz-parametrilla ja vahvistaa automaattisen V / Hz-toiminnan kytketyn moottorin kautta.
Edellinen: Kuinka rakentaa kasvava valopiiri Seuraava: Vedenpehmenninpiiri tutkittu
![Rakenna yksinkertainen Buck-muunninpiiri [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)