Viestissä keskustellaan elektronisesta moottorin nopeuden säätimestä tai ohjainpiiristä, joka käyttää RPM-takaisinkytkentäsignaalisilmukkaa hall-ilmiöanturiverkon kautta. Idean pyysi Imsa Naga.
Piirin tavoitteet ja vaatimukset
- Kiitos ajastasi. Uskon, että tämä piiri sopisi yksivaiheiseen syöttöön. Laturini on 3-vaiheinen 7KvA ja haluaisin liittää sen dieselmoottorimoottoriin, jossa on kaasupoljin nopeudensäätimen sijasta.
- Haluan toteuttaa - 'SÄHKÖISEN MOOTTORIN NOPEUDEN HALLINTALAITTEEN', jolla todennäköisesti olisi elektroninen servo-ohjattu mekanismi, kuten - nopeusanturipiiri (moottorin kierroslukuanturi) servomoottorin käyttämiseksi kaasupoljimen käyttämiseksi ylläpitämiseksi moottorin vakionopeus laturiin kohdistuvaan kuormitukseen nähden.
- Tämä auttaisi säilyttämään generaattorin taajuuden ja jännitteen. Pystyn huolehtimaan mekaanisesta näkökulmasta, jos suunnittelet ystävällisesti piirin servomoottorin ohjaamiseksi siten, että se voidaan kääntää kumpaankin suuntaan suhteessa moottorin kierrosluvun muutokseen. Paljon kiitoksia ennakoinnissa.
Piirikaavio

HUOMAUTUS: MOOTTORI VOITA VAIHTAA 12 V: N JOUSIKUormitetulla solenoidilla
Muotoilu
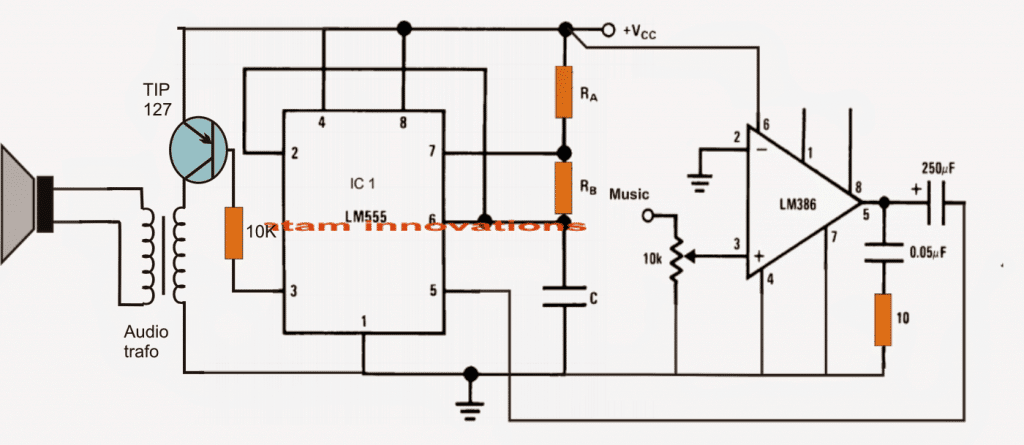
Dieselmoottorin kierrosluvun säätimen tai säätimen piiri voidaan nähdä yllä olevasta kuvasta käyttämällä palautetta RPM-prosessoria tai a kierroslukumittarin piiri
Vasen puoli IC1 555 -vaihe muodostaa yksinkertaisen kierroslukumittaripiirin, joka on konfiguroitu a: lla Hall-efektianturi kiinnitetty moottorin kuormapyörään sen kierrosluvun tunnistamiseksi.
Kierrosluku muutetaan suhteellisesti vaihtelevaksi pulssiksi tai taajuudeksi ja sitä käytetään BJT: n pohjassa IC1: n tapin # 2 vaihtamiseksi.
Piirin käyttö
IC1 on pohjimmiltaan väärennetty monostabiilissa tilassa, mikä saa sen lähdön tuottamaan suhteellisesti säätyvän ON / OFF-kytkennän, jonka jakso asetetaan käyttämällä esitettyä 1 M pottia.
IC1: n lähtö, joka kuljettaa kierrosluvun sisällön pidennettyjen ajastettujen pulssien muodossa, tasoitetaan riittävästi integraattorivaiheella, joka koostuu parista RC-komponentista käyttämällä vastuksia 1K, 10K ja 22uF. 2.2uF kondensaattorit.
Tämä vaihe muuntaa monostabiilin karkean RPM-datan kohtuullisen tasaisesti vaihtelevaksi tai eksponentiaalisesti vaihtelevaksi jännitteeksi.
Tämä eksponentiaalisesti vaihteleva jännite voidaan nähdä yhdistettynä seuraavan IC2 555 -asteen tapaan # 5, joka on konfiguroitu astabiiliksi piiriksi.
Tämän pysyvän tehtävänä on tuottaa hyvin kapea tai matala PWM-ulostulo nastallaan # 3 normaaleissa käyttöolosuhteissa.
Tässä normaalissa käyttöolosuhteessa tarkoitetaan tilannetta, kun havaittu kierrosluku on määritellyn rajan sisällä ja IC2: n nasta # 5 ei saa mitään jännitesyöttöä lähettimen seuraajasta. Tämä matala PWM-ulostulo voidaan toteuttaa säätämällä sopivasti kaksi 100k-vastusta ja 1uF-kondensaattori, joka liittyy IC2-nastoihin # 6/2 ja nasta # 7.
Tämä matala PWM IC2: n nastasta # 3 ei kykene kytkemään TIP122: ta riittävän voimakkaasti, joten ilmoitettu moottoripyöräkokoonpano ei pysty saamaan vaadittua vauhtia ja pysyy siksi deaktivoituna.
Kuitenkin kun kierrosluku alkaa nousta, kierroslukumittari alkaa tuottaa eksponentiaalisesti suurempia jännitteitä, mikä puolestaan aiheuttaa suhteellisesti kasvavan jännitteen IC2: n tapissa # 5.
Tämä antaa TIP122: n johtaa myöhemmin kovemmin ja kytketty moottori saavuttaa riittävän vääntömomentin, niin että se alkaa painaa kiinnitettyä kaasupoljinta kohti hidastustilaa.
Tämä menettely pakottaa dieselmoottorin vähentämään nopeuttaan, mikä saa vastaavasti kierroslukumittarin ja PWM-vaiheet palautumaan alkuperäisiin olosuhteisiinsa ja panemaan täytäntöön vaaditun hallitun nopeuden dieselmoottorille.
Esitetyn kiihdytysmoottorijärjestelyn sijaan TIP122: n kollektori voitaisiin vaihtoehtoisesti johdottaa CDI-yksikkö dieselmoottorin identtisen nopeuden alentamisen helpottamiseksi kiinteän tilan ja luotettavamman keskustelun kohteena olevan moottorin nopeudenohjauksen tai elektronisen moottorin nopeuden säätimen piirin toteuttamisen.
Kuinka perustaa
Pidä aluksi IC1-, IC2-vaiheet irti irrottamalla emitterin seuraajalinkki IC2: n tapilla # 5.
Seuraavaksi varmista, että kaksi 100k-vastusta on muutettu ja säädetty asianmukaisesti siten, että IC2: n nasta # 3 tuottaa kapeimmat mahdolliset PWM: t (@ noin 5% ON-ajanopeudesta).
Tämän jälkeen käytä a 0 - 12 V säädettävä virtalähde , käytä vaihtelevaa jännitettä IC2: n tapissa # 5 ja vahvista suhteellisesti kasvava PWM tapissa # 3.
Kun astable-osa on testattu, sen kierroslukumittari on tarkistettava soveltamalla tunnettuja RPM-pulsseja, jotka vastaavat haluttua ylirajan RPM-arvoa. Säädön aikana lähettimen seuraaja BJT-alustan esiasetus siten, että sen emitteri pystyy tuottamaan vähintään 10 V tai riittävän voimakkaan tason, jotta IC2 PWM tuottaa vaaditun vääntömomentin kytketylle poljinohjausmoottorille.
Joitakin muokkauksia ja kokeiluja voit odottaa saavuttavan vaaditun moottorin ja siihen liitetyn kuorman automaattisen nopeuden säädön.
PÄIVITTÄÄ
Jos moottori korvataan jousikuormitetulla solenoidilla, yllä olevaa rakennetta voidaan yksinkertaistaa paljon alla olevan mukaisesti:

Magneettiakseli voitaisiin yhdistää kaasupolkimeen suunnitellun automaattisen moottorin kierrosluvun säädön toteuttamiseksi.
Lisätietoja taajuus-jännitemuuntajaan liittyvistä vaihtoehdoista, katso Tämä artikkeli .
Pari: Ajastinohjattu kuntosalin sovelluspiiri Seuraava: Akun lataaminen Piezo Mat -piirillä