Tässä viestissä opimme tekemään yksinkertaisen sähköpyörätuolin käyttämällä tavallista BLDC-moottorin ohjainpiiriä ja pari suuritehoista BLDC-moottoria.
Johdanto
Sähköpyörätuolin käyttöönotto oli kuin siunaus monille erilaisten ystäviemme ystäville, joiden on nyt helpompi liikkua ja matkustaa vaivattomasti, vain napin painalluksella.
Ainoa kallis ja monimutkainen osa pyörätuolirakenteessa on sen ergonomiset laskelmat ja pyörämekanismin tehokkuus, kun taas järjestelmän ohjaamiseen käytettävä elektroniikka näyttää olevan verrattain vähemmän kalliita ja monimutkaista.
Jos valmistajalla on pääsy pyörätuolin tehokkaimpaan ergonomiseen suunnitteluun, järjestelmän sähköisen / elektronisen osan tekeminen voidaan toteuttaa nopeasti toteuttamalla vaiheet seuraavan selityksen mukaisesti.
Tekniset tiedot
Sähköpyörätuolin valmistamiseksi pääkomponentit, joita tähän tarvitaan, voivat olla seuraavan luettelon mukaiset:
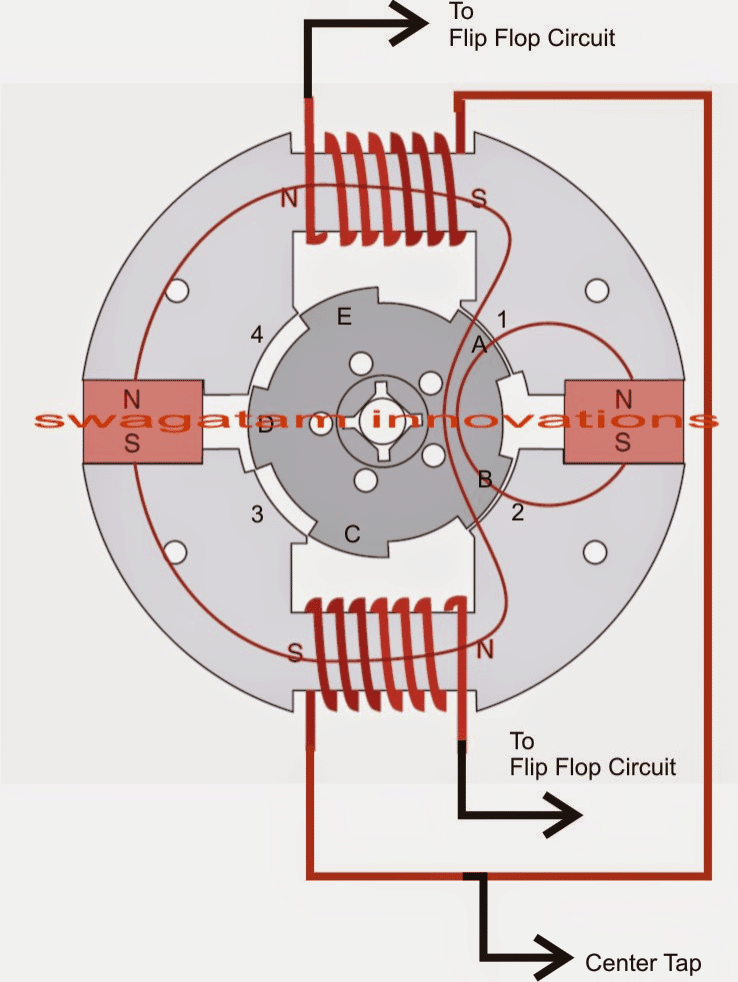
1) BLDC-moottorit - 2nos (kukin 250 wattia)

2) Pyörätuolin runko
3) BLDC-ohjainpiiri
4) Syväpyöräakku tai mieluiten litiumioniakku - 2nos kukin 24V 60AH

Lukuun ottamatta BLDC-ohjainpiirin loppuosa materiaaleista voidaan hankkia valmiiksi markkinoilta.
Vaikka olen esittänyt monia BLDC-ohjainpiirejä tällä verkkosivustolla, valitsen sen, joka näyttää lupaavammalta ja tehokkaammalta johtuen sen joustavista ominaisuuksista moottorin ominaisuuksien ja tehonkeston suhteen.
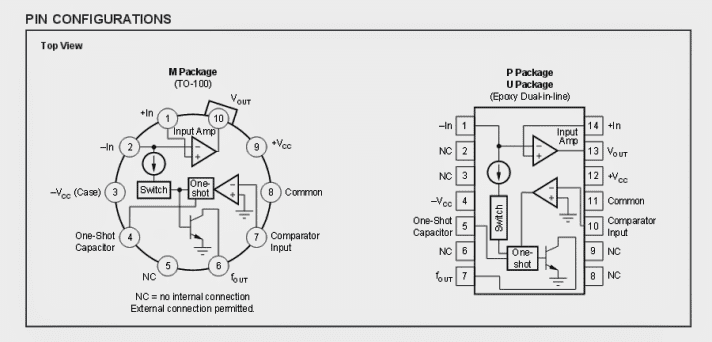
Viimeisessä viestissä keskustelin suhteellisen yksinkertaisesta vielä yleinen BLDC-ohjainpiiri IC ML4425: n avulla , ja se käyttää samaa suunnittelua nykyiselle sähköiselle pyörätuolimoottorin kuljettajapiirillemme.
Anturittomien ominaisuuksiensa ansiosta piiri sallii kaiken tyyppisen 3-vaihemoottorin sisällyttämisen riippumatta siitä, onko siinä antureita vai ei, ja ilman rajoituksia moottorin ajamiselle vaadittavalle virran (Amp) rajalle.
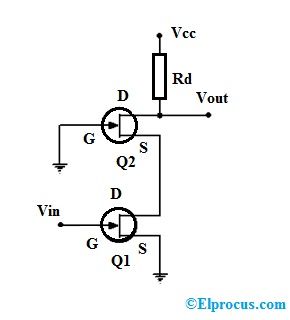
Täydellinen kaavio näkyy seuraavassa kuvassa:
Piirikaaviot

tekniset tiedot yllä olevasta anturittomasta BLDC-ohjaimesta on jo selitetty edellisessä viestissämme, joten voit viitata samaan oppiaksesi yksityiskohtia perusteellisesti.
Hallintalaitteet ovat todella helppoja ja mahdollistavat vaivattoman hallinnan ja ohjaamisen pyörätuolia käyttävälle käyttäjälle.
RUN / BRAKE-kytkin voi olla yksi raskas DPDT-kytkin, jolla käyttäjä voi tarvittaessa pysäyttää pyörätuolin välittömästi.
Pyöräntuolin nopeutta voitiin yksinkertaisesti säätää liu'uttamalla R18-nuppia myötäpäivään / vastapäivään. Tämän potin on oltava erittäin hyvälaatuista, mieluiten monikiertoinen, kuten alla on esitetty.
Potentiometrin tekniset tiedot

Syöttöjännitteellä on laaja vaihteluväli 24 V: stä 80 V: een, mikä tarkoittaa, että useampia paristoja voitaisiin liittää sarjaan suurempien jännitteiden moottoreiden käyttämiseksi, mikä puolestaan antaisi valmistajalle mahdollisuuden käyttää pienikokoisempia moottoreita ja paristoja, mikä takaa kompaktit ja kevyemmät pyörätuolit .
Molemmat takapyöriin kytketyt moottorit voidaan liittää rinnakkain ja käyttää yllä olevaa BLDC-ohjainpiiriä.
Jos sinulla on kysyttävää yllä selitetystä BLDC-moottorilla toimivasta sähköisestä pyörätuolipiiristä, älä epäröi ilmaista niitä alla olevan hakukentän kautta.
PÄIVITTÄÄ:
Edellä olevasta mallista puuttuu ratkaiseva moottorin peruutusominaisuus, parannettu malli, jolla on peruutusominaisuus, löytyy seuraavasta pdf-lomakkeesta:
https://www.elprocus.com/wp-content/uploads/2018/04/BLDC-driver.pdf
Videoleike:
Pari: Suurivirta-anturiton BLDC-moottoriohjain, joka käyttää Back EMF -toimintoa Seuraava: Kuinka kammen taskulamput toimivat