Viesti selittää menetelmän, jota voidaan todennäköisesti käyttää passiivisen infrapunatunnistimen kyvyn parantamiseen jopa staattisen tai paperitavaran ihmisen läsnäolon havaitsemiseksi. Tämä ominaisuus ei yleensä ole mahdollista perinteisillä PIR-antureilla.
Kuinka PIR tunnistaa ihmisen läsnäolon
Olen jo keskustellut monista PIR-pohjaisista liiketunnistinsovelluksista tällä verkkosivustolla, mutta kaikki nämä sovellukset edellyttävät ihmisen läsnäolon olevan jatkuvasti liikkeessä, jotta PIR havaitsee heidän läsnäolonsa, tämä näyttää olevan suuri haittapuoli, joka estää näitä yksiköitä tunnistamasta jatkuva tai paikallaan oleva ihmisen käyttöaste.
Edellä selitetyllä haittapuolella on kuitenkin syy siihen. Tavanomaiset PIR-anturit toimivat tunnistamalla ihmiskehon infrapunasignaalit parin rinnakkaisen aukon läpi heidän etulinssinsä kautta, ja sen sisäinen piiri aktivoituu vasta, kun IR-signaalit risteävät näiden anturien ('visioiden') välillä.
Infrapunasignaalien risteytys anturien välillä antaa PIR-piirin kääntää tiedot kahdeksi vastaavaksi vuorottelevaksi pulssiksi, mikä puolestaan korjataan liipaisujännitteen muodostamiseksi PIR: n ulostulotapissa.
PIR ei tunnista paperitavara-kohdetta
Tämä tarkoittaa, että jos IR-lähde on liikkumaton, se ei kehota PIR-moduulia tuottamaan mitään laukaisinta ulostulotapinsa yli. Se merkitsee myös sitä, että lähteestä tulevan infrapunasignaalin tulisi jotenkin jatkaa ristikkäisyyttä annettujen PIR-havaitsemispaikkojen yli, jotta se voi tuntea tietyn ihmisen vyöhykkeen sisällä.
Näyttää siltä, että tähän ei ole suoraa tai yksinkertaista korjaustoimenpidettä, koska PIR-moduuleja ei voida muokata sisäisesti tälle, mikä lamauttaa yksikön tunnistamasta paikallaan olevaa ihmisen läsnäoloa.
Looginen havainnointi kuitenkin kertoo meille, että jos sen vaihteleva IR-lähde, jota voidaan tarvita pitämään PIR-moduuli aktivoituna, miksi ei pakottaisi itse PIR: ää olemaan jatkuvassa liikkeessä kohteen sijasta.
Käsite voidaan visualisoida seuraavasta GIF-simulaatiosta, joka näyttää värähtelevän PIR-moduulin ja staattisen ihmisen olentovyöhykkeellä.

Täällä voimme nähdä, kuinka värähtelevä PIR sopeutuu ongelmaan ja muuttaa itsensä mahdollistamaan jopa staattisten IR-kohteiden havaitsemisen.
Tämä tulee mahdolliseksi, koska PIR-moduuli muuttaa liikkeensa avulla kiinteän IR-lähteen jatkuvasti muuttuvaksi IR-kuvantamiseksi kahden vastaanottovälinsä yli.
Vaikka idea näyttää monimutkaiselta, se voidaan tosiasiallisesti yksinkertaisesti ratkaista käyttämällä hitaasti värähtelevää PwM-ohjattua moottoripiiriä.
Opimme koko mekanismin ja piirin yksityiskohdat seuraavista osista.
Kuten olemme jo keskustelleet, tavanomaiset PIR-moduulit pystyvät havaitsemaan vain liikkuvat elävät kohteet eivätkä pysty tunnistamaan paikallaan olevaa kohdetta, mikä tekee sen käytöstä rajoitettua vain ihmisen liiketunnistimena.
Sovelluksissa, joissa motiolettomuuden havaitseminen on tarpeen tällaisissa tilanteissa, tavanomainen PIR voi tulla hyödytön ja saattaa vaatia ulkoista järjestelyä itsensä päivittämiseksi.
PIR: n suunnittelu liikkumattomien kohteiden havaitsemiseksi
Yllä olevassa osassa opimme, että sen sijaan, että tarvitsisimme kohteen olevan liikkeessä, PIR-moduuli voidaan itse siirtää tietyllä säteellä halutun staattisen kohteen havaitsemisen toteuttamiseksi.
Seuraavissa kohdissa opitaan yksinkertaisesta piirimekanismista, jota voidaan käyttää pienen tasavirtamoottorin päälle asennetun PIR: n kanssa ehdotetuille värähtelyille.
PWM / Flip Flop -ohjattu moottoriohjain
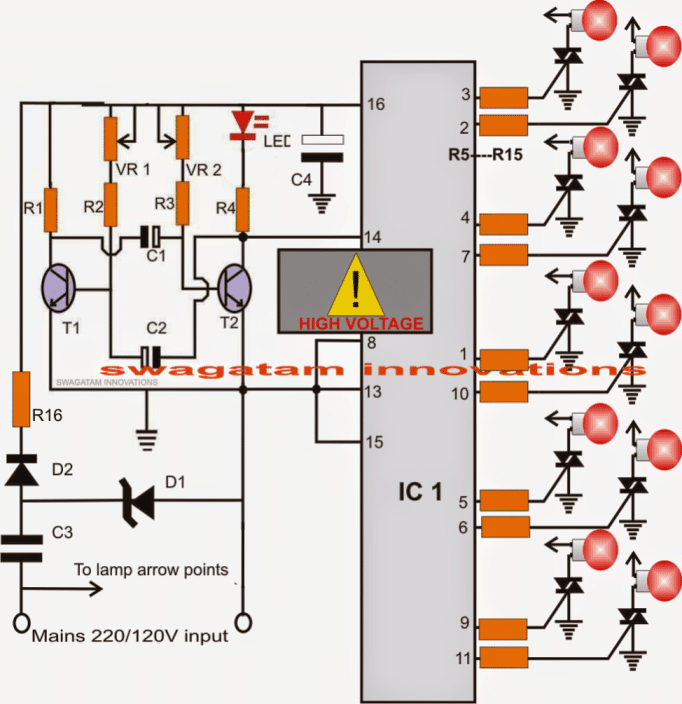
Järjestelmä edellyttää periaatteessa PWM-ohjattu nopeuden määritys ja kiikku vaihtaminen moottorille. Seuraava kaavio osoittaa, kuinka nämä ominaisuudet voidaan osoittaa PIR-moottorille yksinkertaisen piirin avulla:

Esitetyssä piirissä käytetään yhtä IC: n HEF40106-heksakäänteisen schmitt-portin IC: tä, joka sisältää 6 invertteriä EI porttia.
Portit N1 ja N2 on konfiguroitu tuottamaan säädettävä PWM-lähtö, joka syötetään portteihin N4, N5, N6, jotka muodostavat puskurit.
Näiden puskuriporttien yhteinen ulostulo päätetään moottoriohjaimen mosfetin portille.
PWM-sisältö asetetaan P1: n avulla, joka lopulta levitetään kytkettyyn moottoriin joukon DPDT-relekontakteja.
Nämä relekoskettimet määrittävät moottorin liikkeen suunnan (myötä- tai vastapäivään).
Tätä kääntyvää DPDT-relekontaktia ohjataan hila-ajastimella, joka on konfiguroitu portin N3 ympärille, jolloin kondensaattori C3 / R3 määrittää, millä nopeudella releen on vaihdettava, jotta moottori voi muuttaa pyörimissuuntaansa johdonmukaisesti.
Yllä oleva rakenne antaa moottorin suorittaa vaaditun hitaan edestakaisen värähtelyliikkeen tietyn säteittäisen vyöhykkeen yli.
C3 voidaan valita aloittamaan vaihto 5-6 sekunnin välein, ja PWm voidaan säätää erittäin hitaan moottorin liikkeen mahdollistamiseksi, koska sen on vain varmistettava, että PIR-aukot ylittävät kohteen IR-signaalit yli ajoissa.
Koska moottorin toiminta on hidasta, PIR: n lähtöä on ylläpidettävä viivästetyn POIS-ajastimen kautta, jotta kytketty kuorma ei kytkeydy pois päältä ja päälle, kun moottorin liike leikkaa vuorotellen infrapunajohtoja ihmisen läsnäolosta.
Viiveajastin
Seuraavat ajastinpiirin vaihe voidaan käyttää varmistamaan, että joka kerta, kun PIR-lähtö tuottaa havaitun pulssin, ajastimen viivettä pidennetään 5-10 sekunniksi eikä liitettyä kuormitusta koskaan keskeytetä prosessin aikana.

Edellä olevassa kokoonpanossa voimme nähdä moottorin, joka saa sähkökäyttöisen virransyötön PWM / flip flop -vaiheesta, kuten edellisessä kappaleessa keskusteltiin.
Moottorin kara voidaan nähdä yhdistettynä vaakasuoraan akseliin, jonka yli PIR on kiinnitetty siten, että moottorin liikkuessa PIR käy läpi vastaavasti muuttuvan radiaalisen edestakaisen liikkeen.
Samalla kun yllä oleva PIR-liike indusoituu, vyöhykkeen paikallaan olevan kohteen infrapunasignaalit havaitaan lyhyiden vaihtoehtoisten pulssien muodossa, jotka syntyvät sinisellä johdolla osoitetun PIR: n ulostulotapissa.
Nämä pulssit kohdistetaan 1000uF-kondensaattoriin, joka latautuu jokaisen pulssin mukana ja varmistaa, että BC547 pidetään johtavassa tilassa keskeytyksettä prosessin aikana.
BC557-vaiheesta koostuva releohjain reagoi yllä olevaan vakaan BC547-kerääjän signaaliin ja puolestaan pitää releen PÄÄLLÄ, kunhan PIR havaitsee jatkuvasti ihmisen läsnäolon.
Releen kuormitus pysyy siten aktivoituna jatkuvasti, koska alueella on paikallaan pysyvä ihminen.
Kuitenkin, jos ihmisen läsnäolo poistetaan tai kun kohde siirtyy pois vyöhykkeeltä, viiveajastin pitää releen ja kuorman aktivoituna määrätyissä 5-10 sekunnissa, minkä jälkeen se sammuu pysyvästi, kunnes vyöhyke on jälleen kiinni potentiaalisen IR-lähteen kautta.
Osaluettelo
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1 uF / 100 V
- Z1 = 15 V, 1/2 wattia
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST-KYTKIN TAI DPDT-RELE
- R3, C3 määritetään jollakin kokeilulla ja erehdyksellä
PÄIVITTÄÄ:
Edellä selitetty PIR-piiri ihmisen staattisen läsnäolon havaitsemiseksi voidaan paljon yksinkertaistaa käyttämällä signaalihakkuripiiriä, joka on kuvattu seuraavassa GIF-simulaatiossa:
Huolellinen tarkastus osoittaa, että itse asiassa värähtelyliikettä ei yksinkertaisesti tarvita, moottorin ja hakkuriterän voidaan antaa pyöriä vapaasti pitämällä moottorin nopeus alemmalla tasolla .
Tämä saisi aikaan myös suunnitellun staattisen PIR-tunnistustoiminnon.

Videon esittely, joka osoittaa ihmisen staattisen havaitsemisen PIR: lle
Edellinen: 3 ääniohjattua kytkinpiiriä selitetty Seuraava: 4 yksinkertaista sireenipiiriä, jotka voit rakentaa kotona


![Rakenna yksinkertainen Buck-muunninpiiri [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)