LIDAR- tai 3D-laserskannaus kehitettiin 1960-luvun alussa sukellusveneiden havaitsemiseksi lentokoneesta, ja varhaisia malleja käytettiin menestyksekkäästi 1970-luvun alussa. Nykyään ympäristötutkimusta on vaikea kuvitella ilman kaukokartoitustekniikoiden käyttöä, kuten valon tunnistus ja etäisyys (LIDAR) ja Radioaaltojen tunnistus ja etäisyys (RADAR) . Mittausten korkea spatiaalinen ja progressiivinen resoluutio, mahdollisuus tarkkailla ilmakehää ympäristön olosuhteissa ja mahdollisuus peittää korkeusalue maasta yli 100 km: n korkeuteen muodostavat LIDAR-instrumenttien houkuttelevuuden.
Lähetetyn säteilyn ja ilmakehän elementtien vuorovaikutusprosesseja voidaan käyttää LIDAR: ssa, jotta voidaan määrittää ympäristön perusmuuttujat eli lämpötila, paine, kosteus ja tuuli sekä maantieteellinen tutkimus joki sängyn korkeus, kaivosten tutkimus, metsien ja kukkuloiden tiheys, tutkimus meren alla (Bathymetry).
Kuinka LIDAR toimii?
Valon tunnistus- ja etäisyysjärjestelmän toimintaperiaate on todella yksinkertainen. LIDAR-anturi, joka on asennettu lentokoneeseen tai helikopteriin. Se tuottaa laser-pulssijonon, joka lähetetään pintaan / kohteeseen mittaamaan aikaa ja joka kestää palata lähteelleen. Varsinainen laskenta sen mittaamiseksi, kuinka pitkään palaava valofoton on kuljettu kohteeseen ja kohteesta, lasketaan
Etäisyys = (valon nopeus x lentoaika) / 2
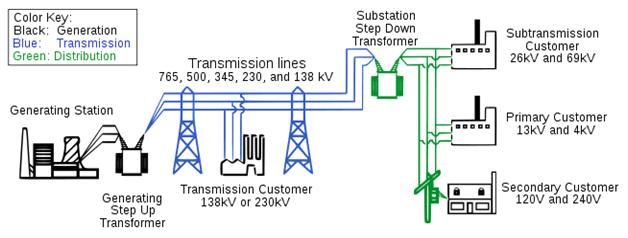
Tarkat etäisyydet lasketaan sitten maan pisteisiin ja korkeudet voidaan määrittää yhdessä maanpinnan rakennusten, teiden ja kasvillisuuden kanssa. Nämä korkeudet yhdistetään digitaaliseen ilmakuvaan digitaalisen korkeusmallin tuottamiseksi maasta.

Valon tunnistus- ja mittausjärjestelmä
Laserlaite antaa nopean laservalopulssin pinnalle, jotkut jopa 150 000 pulssia sekunnissa. Laitteen anturi mittaa ajan, jonka kuluu jokaisen pulssin heijastumiseen takaisin. Valo liikkuu tasaisella ja tunnetulla nopeudella, joten LIDAR-instrumentti voi laskea etäisyyden itsensä ja kohteen välillä suurella tarkkuudella. Toistamalla tämän nopeasti etenemällä laite rakentaa monimutkaisen 'kartan' mittaamastaan pinnasta.
Kanssa ilmassa tapahtuvan valon havaitseminen ja mittaaminen , muut tiedot on kerättävä tarkkuuden varmistamiseksi. Koska anturi liikkuu korkeudessa, laitteen sijainti ja suunta on sisällytettävä lasersykkeen sijainnin määrittämiseen lähetyshetkellä ja paluuaikaan. Nämä lisätiedot ovat tärkeitä tietojen eheyden kannalta. Kanssa maahan perustuva valon tunnistus ja etäisyys yksi GPS-sijainti voidaan lisätä kussakin paikassa, johon laite on asetettu.
LIDAR-järjestelmätyypit
Perustuu alustaan
- Maapohjainen LIDAR
- Ilmassa oleva LIDAR
- Spaceborne LIDAR

Alustaan perustuvat LiDAR-järjestelmät
Bade fyysisestä prosessista
- Etäisyysmittari LIDAR
- DIAL LIDAR
- LIDAR Doppler
Sitoutunut sirontaan
- Minun
- Rayleigh
- Raman
- Fluoresenssi
LIDAR-järjestelmien pääkomponentit
Useimmissa valotunnistus- ja etäisyysjärjestelmissä on neljä pääkomponenttia

Valonhavaitsemis- ja vaihtelevat järjestelmien komponentit
Laserit
Laserit luokitellaan aallonpituuden mukaan. Ilmassa kulkevat valotunnistus- ja etäisyysjärjestelmät käyttävät 1064 nm: n diodipumppuja Nd: YAG-lasereita, kun taas Bathymetric-järjestelmissä käytetään 532 nm: n kaksoisdiodilla pumpattuja Nd: YAG-lasereita, jotka tunkeutuvat veteen pienemmällä vaimennuksella kuin ilmassa oleva järjestelmä (1064 nm). Parempi resoluutio voidaan saavuttaa lyhyemmillä pulsseilla edellyttäen, että vastaanottimen ilmaisimella ja elektroniikalla on riittävä kaistanleveys lisääntyneen datavirran hallintaan.
Skannerit ja optiikka
Nopeus, jolla kuvia voidaan kehittää, vaikuttaa nopeuteen, jolla ne voidaan skannata järjestelmään. Eri resoluutioille, kuten atsimuutille ja korkeudelle, kaksoisakseliskannerille, kaksoisvärähteleville peileille ja monikulmaisille peileille, on saatavana useita skannausmenetelmiä. Optiikan tyyppi määrittää alueen ja resoluution, jonka järjestelmä voi havaita.
Valodetektori ja vastaanotinelektroniikka
Valoilmaisin on laite, joka lukee ja tallentaa takaisinhajotun signaalin järjestelmään. Valodetektoritekniikoita on kahta päätyyppiä, kiinteän tilan ilmaisimet, kuten piilavina-valodiodit ja valon monistimet.
Navigointi- ja paikannusjärjestelmät / GPS
Kun valotunnistus- ja etäisyysanturi on asennettu lentokoneen satelliittiin tai autoihin, anturin absoluuttinen sijainti ja suunta on määritettävä käyttökelpoisten tietojen säilyttämiseksi. Globaalit paikannusjärjestelmät (GPS) antaa tarkkoja maantieteellisiä tietoja anturin sijainnista ja inertiaalinen mittausyksikkö (IMU) tallentaa anturin tarkan suunnan kyseisessä paikassa. Nämä kaksi laitetta tarjoavat menetelmän anturitietojen muuntamiseksi staattisiksi pisteiksi käytettäväksi useissa järjestelmissä.

Navigointi- ja paikannusjärjestelmät / GPS
LIDAR-tietojenkäsittely
Valon tunnistus- ja etäisyysmekanismi kerää vain korkeustietoja ja yhdessä inertiamittausyksikön tietojen kanssa sijoitetaan lentokoneeseen ja GPS-yksikköön. Näiden järjestelmien avulla valontunnistus- ja etäisyysanturi kerää datapisteitä, tietojen sijainti tallennetaan GPS-anturin kanssa. Tietoja tarvitaan jokaisen takaisin anturiin hajautuneen pulssin paluuajan käsittelemiseen ja muuttuvien etäisyyksien anturista tai muutosten peittämiseksi maanpinnan pinnoissa laskemiseksi. Kyselyn jälkeen tiedot ladataan ja käsitellään erityisesti suunnitellulla tietokoneohjelmistolla (LIDAR point Cloud Data Processing Software). Lopullinen lähtö on tarkka, maantieteellisesti rekisteröity pituusaste (X), leveysaste (Y) ja korkeus (Z) jokaiselle datapisteelle. LIDAR-kartoitustiedot koostuvat pinnan korkeusmittauksista ja ne saavutetaan ilmatopografisten tutkimusten avulla. LIDAR-tietojen sieppaamiseen ja tallentamiseen käytetty tiedostomuoto on yksinkertainen tekstitiedosto. Korkeuspisteitä käyttämällä tietoja voidaan käyttää yksityiskohtaisten topografisten karttojen luomiseen. Näiden datapisteiden avulla jopa ne mahdollistavat digitaalisen korkeusmallin luomisen maanpinnasta.
LIDAR-järjestelmien sovellukset
Merentutkimus
LIDARia käytetään laskemaan kasviplanktonin fluoresenssi ja biomassa meren pinnalla. Sitä käytetään myös meren syvyyden mittaamiseen (batymetria).

LiDAR meritieteessä
DEM (digitaalinen korkeusmalli)
Siinä on x, y, z-koordinaatit. Korkeusarvoja voidaan käyttää kaikkialla, teillä, rakennuksissa, silloilla ja muilla alueilla. Sen ansiosta pinnan korkeus, pituus ja leveys on helppo kaapata.
Ilmakehän fysiikka
LIDARia käytetään pilvien tiheyden ja hapen, Co2: n, typen, rikin ja muiden kaasupartikkeleiden pitoisuuden mittaamiseen keski- ja ylemmässä ilmakehässä.
Sotilaallinen
Armeijan ihmiset ovat aina käyttäneet LIDARia maata ympäröivän rajan ymmärtämiseen. Se luo korkean resoluution kartan sotilastarkoituksiin.
Meteorologia
LIDARia on käytetty pilven ja sen käyttäytymisen tutkimiseen. LIDAR iski aallonpituudeltaan pienten hiukkasten pilvessä ymmärtämiseksi pilvien tiheyden.
Jokikartoitus
Greenlight (532 nm) LIDAR-lasaria käytetään mittaamaan vedenalaisia tietoja, joita tarvitaan joen syvyyden, leveyden, virtauslujuuden ja muun ymmärtämiseen. Jokisuunnittelua varten sen poikkileikkaustiedot poimitaan valonhavaitsemis- ja etäisyystiedoista (DEM), jotta voidaan luoda jokimalli, joka luo tulvan reunakartan.

Jokikartoitus LIDAR: n avulla
Mikro-topografia
Valon tunnistus ja etäisyys on erittäin tarkka ja selkeä tekniikka, joka käyttää lasersädettä osuakseen esineeseen. Säännöllinen fotogrammetria tai muu mittaustekniikka ei voi antaa metsän latvuksen pinnan korkeusarvoa. Mutta LIDAR voi tunkeutua kohteen läpi ja havaita pinta-arvon.
Onko sinulla LIDARin ja sen sovellusten perustiedot? Ymmärrämme, että yllä annetut tiedot selventävät valonhavaitsemis- ja etäisyysmekanismin käsitteitä niihin liittyvillä kuvilla ja erilaisilla reaaliaikaisilla sovelluksilla. Lisäksi, jos sinulla on epäilyksiä tästä konseptista tai sähköisten projektien toteuttamisesta, anna ehdotuksesi ja kommenttisi tähän artikkeliin, jonka voit kirjoittaa alla olevaan kommenttiosioon. Tässä on kysymys sinulle, Mitkä ovat erityyppiset valotunnistus- ja etäisyysvalot?