Tässä viestissä keskustellaan yksinkertaisen 3-vaiheisen induktiomoottorin nopeudenohjauspiirin tekemisestä, jota voidaan käyttää myös yksivaiheiseen induktiomoottoriin tai kirjaimellisesti minkä tahansa tyyppiseen vaihtovirtamoottoriin.
Kun se tulee induktiomoottoreiden nopeuden säätäminen , yleensä käytetään matriisimuuntimia, joihin liittyy monia monimutkaisia vaiheita, kuten LC-suodattimet, kaksisuuntaiset kytkinryhmät (IGBT: n avulla) jne.
Kaikkia näitä käytetään lopulta hienonnetun vaihtosignaalin saavuttamiseen, jonka toimintajaksoa voidaan säätää monimutkaisella mikro-ohjainpiirillä ja lopulta tarvittavan moottorin nopeuden säätö.
Voimme kuitenkin kokeilla ja yrittää saavuttaa 3-vaiheisen induktiomoottorin nopeuden säätämisen paljon yksinkertaisemman konseptin avulla käyttämällä edistyksellistä nollarajan detektorin opto-kytkin IC: tä, teho-triacia ja PWM-piiriä.
Zero Crossing Detector Opto -liittimen käyttö
Kiitos MOC-sarjan optoerottimien, jotka ovat tehneet triac-ohjauspiirit erittäin turvallisiksi ja helposti konfiguroitaviksi ja mahdollistaneet vaivattoman PWM-integraation suunnitelluille ohjauksille.
Yhdessä aikaisemmista viesteistä keskustelin yksinkertaisesta PWM-pehmeäkäynnistysmoottorin ohjainpiiri joka otti käyttöön MOC3063 IC: n tarjoamaan tehokkaan pehmeän käynnistyksen liitetylle moottorille.
Tässäkin käytämme samanlaista menetelmää ehdotetun kolmivaiheisen induktiomoottorin nopeudenohjauspiirin toteuttamiseksi, seuraava kuva osoittaa, miten tämä voidaan tehdä:
Kuvassa nähdään kolme identtistä MOC-optoyhdistimen vaihetta, jotka on konfiguroitu normaaliin triac-säätötilaansa, ja tulopuoli integroitu yksinkertainen IC 555 PWM -piiri .
3 MOC-piiriä on konfiguroitu käsittelemään 3-vaiheista AC-tuloa ja toimittamaan sama liitetylle induktiomoottorille.
PWM-tulo optoeristyksen LED-ohjauspuolella määrittää 3-vaiheisen AC-tulon leikkaussuhteen, jota MOC ICS käsittelee.
IC 555 PWM -ohjaimen käyttäminen (Zero Voltage Switching)
Tämä tarkoittaa säätämällä 555 IC: hen liittyvä PWM-potti voidaan tehokkaasti ohjata induktiomoottorin nopeutta.
Nastassa # 3 olevalla lähdöllä on vaihteleva käyttöjakso, joka puolestaan vaihtaa lähtötriakkia vastaavasti, mikä johtaa joko AC RMS -arvon kasvuun tai pienenemiseen.
RMS: n lisääminen laajempien PWM: ien avulla mahdollistaa suuremman nopeuden saamisen moottorilla, kun taas AC RMS: n pienentäminen kapeammien PWM: ien avulla tuottaa päinvastaisen vaikutuksen, eli se saa moottorin hidastumaan suhteellisesti.
Yllä olevat ominaisuudet on toteutettu erittäin tarkasti ja turvallisesti, koska IC: ille on määritetty monia sisäisiä hienostuneita ominaisuuksia, jotka on erityisesti suunniteltu triakkien ja raskaiden induktiivisten kuormien ajo kuten induktiomoottorit, solenoidit, venttiilit, kontaktorit, puolijohdereleet jne.
IC varmistaa myös täysin eristetyn DC-vaiheen toiminnan, jonka avulla käyttäjä voi tehdä säätöjä pelkäämättä sähköiskua.
Periaatetta voidaan käyttää tehokkaasti myös yksivaiheisen moottorin nopeuden säätämiseen käyttämällä yhtä MOC IC: tä 3: n sijaan.
Suunnittelu perustuu itse asiassa ajan suhteellinen triac-asema teoria. Ylempi IC555 PWM -piiri voidaan säätää tuottamaan 50%: n käyttöjakso paljon suuremmalla taajuudella, kun taas alempaa PWM-piiriä voidaan käyttää induktiomoottorin nopeuden säätöoperaation toteuttamiseen liittyvän potin säätöjen avulla.
Tällä 555 IC: llä suositellaan olevan suhteellisen alhaisempi taajuus kuin ylemmällä IC 555 -piirillä. Tämä voidaan tehdä nostamalla nasta # 6/2 kondensaattori arvoon noin 100 nF.

HUOMAUTUS: SOPIVIEN INDUKTORIEN LISÄÄMINEN VAIHEJOHTOISIIN SAATTAVIIN SARJOIHIN VOI PARANTAA JÄRJESTELMÄN NOPEUDEN SÄÄTÖTÄ.
Oletettu aaltomuodon ja vaiheen hallinta käyttäen yllä olevaa käsitettä:

Edellä selitetty menetelmä 3-vaiheisen induktiomoottorin ohjaamiseksi on itse asiassa melko raakaa, koska se on ei V / Hz-ohjausta .
Se yksinkertaisesti käyttää virran kytkemistä päälle / pois päältä eri nopeuksilla keskimääräisen moottorin tehon tuottamiseksi ja nopeuden säätämiseksi muuttamalla tätä keskimääräistä moottorin vaihtovirtaa.
Kuvittele, että kytket moottorin päälle / pois päältä manuaalisesti 40 kertaa tai 50 kertaa minuutissa. Tämä johtaisi siihen, että moottorisi hidastuu suhteelliseen keskiarvoon, mutta liikkuu jatkuvasti. Edellä mainittu periaate toimii samalla tavalla.
Teknisempi lähestymistapa on suunnitella piiri, joka varmistaa V / Hz-suhteen oikean hallinnan ja säätää sen automaattisesti luistonopeudesta tai mahdollisista jännitteen vaihteluista riippuen.
Tätä varten käytämme periaatteessa seuraavia vaiheita:
- H-Bridge- tai Full Bridge IGBT -ohjainpiiri
- 3-vaiheinen generaattorivaihe Full Bridge -piirin syöttämiseksi
- V / Hz PWM -suoritin
Full Bridge IGBT -ohjauspiirin käyttäminen
Jos yllä olevan triac-pohjaisen suunnittelun määritysmenetelmät näyttävät pelottavilta, voit kokeilla seuraavaa täyssillan PWM-pohjaista induktiomoottorin nopeuden ohjausta:

Yllä olevassa kuvassa esitetty piiri käyttää yhtä siruista täyssillan ohjainta IC IRS2330 (viimeisin versio on 6EDL04I06NT), jolla on kaikki sisäänrakennetut ominaisuudet, jotta tyydytetään turvallinen ja täydellinen kolmivaiheinen moottorikäyttö.
IC tarvitsee vain synkronoidun 3-vaiheisen logiikkatulon HIN / LIN-pinoutiensa yli vaaditun 3-vaiheisen värähtelylähdön muodostamiseksi, jota lopulta käytetään täyssillan IGBT-verkon ja liitetyn 3-vaihemoottorin käyttämiseen.
nopeuden säätö PWM-injektio toteutetaan 3 erillisen puolisillan NPN / PNP-ohjainvaiheen kautta, joita ohjataan SPWM-syötteellä IC 555 PWM -generaattorista, kuten edellisissä suunnitelmissamme nähdään. Tätä PWM-tasoa voidaan viime kädessä käyttää induktiomoottorin nopeuden säätämiseen.
Ennen kuin opimme todellisen induktiomoottorin nopeuden säätötavan, ymmärretään ensin, kuinka automaattinen V / Hz-ohjaus voidaan saavuttaa käyttämällä muutamia IC 555 -piirejä, kuten alla käsitellään
Automaattinen V / Hz PWM -prosessoripiiri (suljettu silmukka)
Edellä olevissa osioissa opimme suunnitelmat, jotka auttavat induktiomoottoria liikkumaan valmistajan ilmoittamalla nopeudella, mutta se ei säädä vakion V / Hz-suhteen mukaan, ellei seuraava PWM-prosessori ole integroitu H -Silta PWM -syöttö.

Yllä oleva piiri on yksinkertainen PWM-generaattori, joka käyttää pari IC 555: tä . IC1 muodostaa PWM-taajuuden, joka muunnetaan kolmion aaltoiksi IC2: n tapissa # 6 R4 / C3: n avulla.
Näitä kolmion aaltoja verrataan siniaallon aaltoiluun IC2: n tapissa # 5. Nämä näytevirheet saadaan korjaamalla 3-vaiheinen vaihtovirtaverkko 12 V: n AC-aaltoon ja syötetään IC2: n tapaan # 5 vaadittavaa prosessointia varten.
Vertaamalla kahta aaltomuotoa, sopivasti mitoitettu SPWM luodaan IC2: n nastassa # 3, josta tulee H-sillan verkon ohjaava PWM.
Kuinka V / Hz-piiri toimii
Kun virta kytketään päälle, kondensaattori napassa # 5 alkaa tuottamalla nollajännite tapissa # 5, mikä aiheuttaa pienimmän SPWM-arvon H-sillan piiri , mikä puolestaan mahdollistaa induktiomoottorin käynnistymisen hitaalla asteittaisella pehmeällä käynnistyksellä.
Kun tämä kondensaattori latautuu, potentiaali tapissa # 5 nousee, mikä nostaa SPWM: ää suhteellisesti ja antaa moottorin saada nopeutta asteittain.
Voimme myös nähdä kierroslukumittarin takaisinkytkentäpiirin, joka on integroitu myös IC2: n tapiin # 5.
Tämä kierroslukumittari valvoo roottorin nopeutta tai liukumisnopeutta ja tuottaa lisäjännitettä IC2: n tapissa # 5.
Nyt kun moottorin nopeus kasvaa, liukumisnopeus yrittää synkronoitua staattorin taajuuden kanssa ja prosessin aikana se alkaa saada nopeutta.
Tämä induktioliuoksen kasvu nostaa kierroslukumittarin jännitettä suhteellisesti, mikä puolestaan saa IC2: n kasvamaan SPWM-lähtö ja tämä puolestaan lisää moottorin nopeutta.
Yllä oleva säätö yrittää pitää V / Hz-suhteen melko vakiona, kunnes lopulta, kun IC2: n SPWM ei pysty enää kasvamaan.
Tässä vaiheessa luistonopeus ja staattorin nopeus saavuttavat vakaan tilan ja tätä ylläpidetään, kunnes tulojännitettä tai luistonopeutta (kuormituksesta johtuen) ei muuteta. Jos näitä muutetaan, V / Hz-prosessoripiiri taas aktivoituu ja alkaa säätää suhdetta ylläpitämään induktiomoottorin nopeuden optimaalista vastetta.
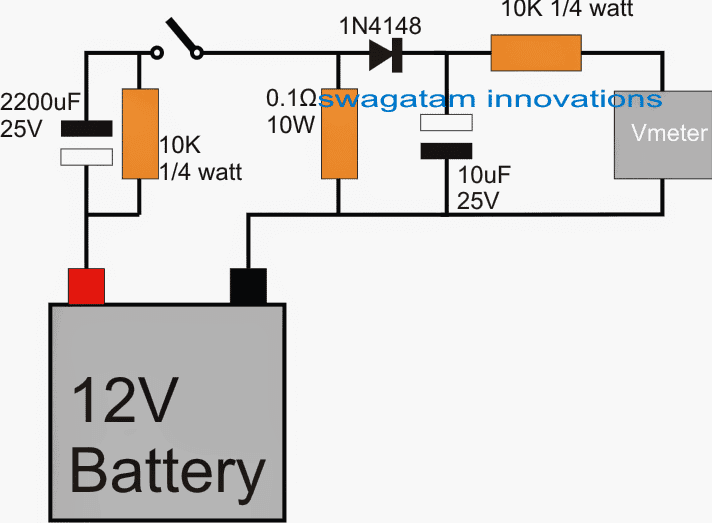
Kierroslukumittari
Kierroslukumittarin piiri voidaan myös rakentaa edullisesti seuraavalla yksinkertaisella piirillä ja integroida yllä selitettyihin piirivaiheisiin:

Kuinka toteuttaa nopeuden säätö
Yllä olevissa kappaleissa ymmärrimme automaattisen säätöprosessin, joka voidaan saavuttaa integroimalla a kierroslukumittarin palaute automaattiseen SPWM-ohjainpiiriin.
Nyt opitaan, miten induktiomoottorin nopeutta voidaan säätää vaihtelemalla taajuutta, mikä pakottaa SPWM: n lopulta pudottamaan ja ylläpitämään oikeaa V / Hz-suhdetta.
Seuraava kaavio selittää nopeuden säätövaiheen:

Täällä voimme nähdä 3-vaiheisen generaattoripiirin, joka käyttää IC 4035: ää, jonka vaihesiirtotaajuutta voidaan muuttaa vaihtelemalla kellotuloa nastassaan # 6.
3-vaiheiset signaalit syötetään 4049 IC-porttien yli tarvittavien HIN, LIN-syötteiden tuottamiseksi täyssillan ohjainverkolle.
Tämä tarkoittaa, että muuttamalla IC 4035: n kellotaajuutta sopivasti voimme tehokkaasti muuttaa induktiomoottorin 3-vaiheista toimintataajuutta.
Tämä toteutetaan yksinkertaisen IC 555 -stabiilipiirin kautta, joka syöttää säädettävän taajuuden IC 4035: n tapissa # 6 ja sallii taajuuden säätämisen liitetyn 100K-potin kautta. Kondensaattori C on laskettava siten, että säädettävä taajuusalue on liitetyn induktiomoottorin oikean spesifikaation sisällä.
Kun taajuuspottia vaihdetaan, myös induktiomoottorin tehollinen taajuus muuttuu, mikä muuttaa vastaavasti moottorin nopeutta.
Esimerkiksi kun taajuutta pienennetään, moottorin nopeus pienenee, mikä puolestaan aiheuttaa kierroslukumittarin lähdön vähentämään jännitettä suhteellisesti.
Tämä kierroslukumittarin ulostulon suhteellinen pieneneminen pakottaa SPWM: n kapenemaan ja vetää siten moottorin jännitelähdön alaspäin.
Tämä toiminto puolestaan varmistaa, että V / Hz-suhde säilyy samalla kun ohjataan induktiomoottorin nopeutta taajuusohjauksella.
Varoitus: Yllä oleva käsite on suunniteltu vain teoreettisiin oletuksiin, jatka varoen.
Jos sinulla on vielä epäilyksiä tästä 3-vaiheisesta induktiomoottorin nopeussäätimen suunnittelusta, voit tervetullut lähettämään saman kommenttisi kautta.
Pari: Kuinka suunnitella keskeytymätön virtalähde (UPS) Seuraava: Kahden vaihtoehtoisen kuorman kytkeminen päälle / pois IC 555: n avulla