Piiriä, joka sallii liitetyn moottorin toimia myötä- ja vastapäivään vaihtoehtoisten tuloliipaisimien kautta, kutsutaan kaksisuuntaiseksi ohjainpiiriksi.
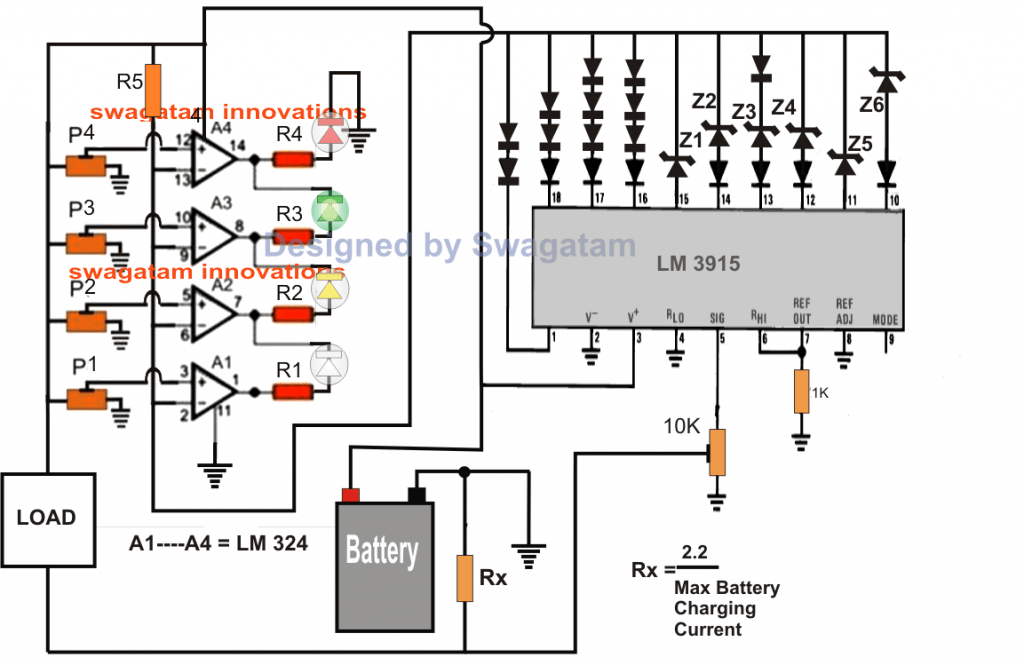
Ensimmäisessä alla olevassa mallissa käsitellään täyssilta- tai H-silta-pohjaista kaksisuuntaista moottorinohjauspiiriä käyttäen IC LM324: n 4 opampia. Toisessa artikkelissa kerrotaan suuren vääntömomentin kaksisuuntaisesta moottorin ohjainpiiristä IC 556: n avulla
Johdanto
Yleisesti, mekaaniset kytkimet ovat tottuneet säätämään tasavirtamoottorin pyörimissuuntaa. Käytetyn jännitteen napaisuuden säätäminen ja moottori pyörii vastakkaiseen suuntaan!
Toisaalta tällä voi olla haitta, että DPDT-kytkin on lisättävä jännitteen napaisuuden muuttamiseksi, mutta olemme käsitelleet vain kytkintä, joka tekee toimenpiteen melko helpoksi.
DPDT: llä voi kuitenkin olla yksi vakava ongelma, ei ole suositeltavaa kääntää jännite äkillisesti tasavirtamoottorin yli sen pyörimisliikkeen aikana. Tämä voi johtaa nykyiseen piikkiin, joka voi polttaa siihen liittyvän nopeuden säätimen.
Lisäksi kaikenlainen mekaaninen rasitus voi myös aiheuttaa samanlaisia ongelmia. Tämä piiri voittaa nämä komplikaatiot helposti. Suuntaa ja nopeutta manipuloidaan yksinäisen potentiometrin avulla. Potin pyörittäminen tiettyyn suuntaan saa moottorin pyörimään.
Pannun vaihtaminen vastakkaiseen suuntaan antaa moottorin pyöriä taaksepäin. Potin keskiasento kytkee moottorin POIS PÄÄLTÄ varmistaen, että moottori hidastuu ensin ja pysähtyy ennen kuin yritetään muuttaa suuntaa.
Tekniset tiedot
Jännite: Piiri ja moottori käyttävät yhteistä virtalähdettä. Tämä tarkoittaa, että koska LM324 on 32 VDC, tästä tulee myös suurin käytettävissä oleva jännite moottorin käyttämiseen.
Nykyinen: IRFZ44 MOSFET on suunniteltu 49A: lle, ja IRF4905 pystyy käsittelemään 74A: ta. Siitä huolimatta piirilevykiskot, jotka kulkevat MOSFET-nastoista ruuviliittimeen, pystyvät vain hallitsemaan noin 5A. Tätä voitaisiin parantaa juottamalla kuparilangan palat piirilevyjen yli.
Tällöin varmista, että MOSFET-laitteet eivät kuumene liian kuumina - jos näin tapahtuu, näihin laitteisiin on asennettava suuremmat jäähdytyselementit.
LM324 Pinouts

LM324: ää käyttävien tasavirtamoottoreiden kaksisuuntainen ohjaus
Pohjimmiltaan löydät 3 tapaa säädä tasavirtamoottoreiden nopeutta :
1. Optimaalisen kiihtyvyyden saavuttaminen käyttämällä koneellisia vaihteita: Tämä lähestymistapa ylittää usein useimpien kotipajoissa harjoittavien harrastajien mukavuuden.
kaksi. Moottorin jännitteen pienentäminen sarjavastuksen kautta. Tämä voi olla varmasti tehotonta (teho häviää vastuksesta) ja johtaa myös vääntömomentin pienenemiseen.
Myös moottorin kuluttama virta kasvaa moottorin kuormituksen kasvaessa. Lisääntynyt virta tarkoittaa enemmän jännitehäviötä sarjavastuksen yli ja siten moottorin pudotettua jännitettä.
Sitten moottori pyrkii vetämään vielä suurempaa määrää virtaa, jolloin moottori pysähtyy.
3. Soveltamalla moottoriin koko syöttöjännite lyhyillä pulsseilla: Tämä menetelmä päästä eroon sarjan pudotusvaikutuksesta. Tätä kutsutaan pulssinleveyden moduloinniksi (PWM) ja se on tämän piirin strategia. Nopeat pulssit antavat moottorin toimia hitaasti pidennetyt pulssit antavat moottorin käydä nopeammin.

MITEN IT-TOIMINNOT (katso kaavio)
Piiri voidaan jakaa neljään vaiheeseen:
1. Moottorin ohjaus - IC1: A
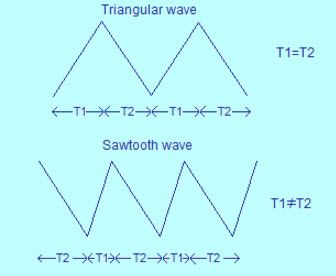
2. Kolmion aaltogeneraattori - IC1: B
3. Jännitevertailijat - IC1: C ja D
4. Moottorikäyttö - Q3-6
Aloitetaan moottorin kuljettajavaiheella, joka on keskitetty MOSFETien Q3-6 ympärille. Vain pari näistä MOSFETeistä pysyy aktivoidussa tilassa milloin tahansa. Kun Q3 ja Q6 ovat päällä, virta liikkuu moottorin läpi ja saa sen pyörimään yhteen suuntaan.
Heti kun Q4 ja Q5 ovat toimintakunnossa, nykyinen kierto muuttuu päinvastaiseksi ja moottori alkaa pyöriä vastakkaiseen suuntaan. IC1: C ja IC1: D käsittelevät MOSFET-laitteiden virtaa.
Opampit IC1: C ja IC1: D on kytketty jännitteen vertailijoina. Näiden opampien vertailujännite syntyy vastuksen jännitteenjakajalla R6, R7 ja R8.
Huomaa, että IC1: D: n referenssijännite on kytketty plus-tuloon, mutta IC1: C: lle se on kytketty tuloon ‘-’.
Tämä tarkoittaa, että IC1: D aktivoidaan jännitteellä, joka on korkeampi kuin referenssi, kun taas IC1: C kysytään jännitteellä, joka on pienempi kuin sen ohjearvo. Opamp IC1: B on määritetty kolmion aaltogeneraattoriksi ja toimittaa aktivointisignaalin asiaankuuluville jännitteen vertailijoille.
Taajuus on suunnilleen käänteinen R5: n ja C1 - 270 Hz: n aikavakioon käytetyille arvoille.
R5: n tai C1: n pieneneminen lisää taajuutta, jolloin jompikumpi näistä kasvattaa taajuutta. Kolmion aallon huippu-huippu-ulostulotaso on paljon pienempi kuin kahden jänniteohjeen välinen ero.
Siksi molempien vertailijoiden on erittäin vaikea aktivoida samanaikaisesti. Tai muuten kaikki 4 MOSFET-laitetta alkavat johtaa, mikä johtaisi oikosulkuun ja pilata ne kaikki.
Kolmion aaltomuoto on rakennettu DC-siirtymäjännitteen ympärille. Poikkeaman jännitteen lisääminen tai pienentäminen vaihtelee kolmion aallon pulssin sijaintia sopivasti.
Kolmion aallon vaihtaminen ylöspäin mahdollistaa vertailijan IC1: D aktivoinnin pienentämisen, jolloin vertailija IC1: C aktivoituu. Kun kolmioaallon jännitetaso on kahden jännitereferenssin keskellä, yhtään vertailijaa ei indusoida. DC-siirtymäjännitettä säätelee potentiometri P1 IC1: A: n kautta, joka on suunniteltu jännitteen seuraajaksi.
Tämä antaa matalan lähtöimpedanssin jännitelähteen, jolloin DC-offsetjännite on vähemmän herkkä IC1: B: n kuormitusvaikutuksille.
Kun 'potti' kytketään, tasavirran siirtymäjännite alkaa muuttua joko ylös tai alas potin kääntösuunnan perusteella. Diodi D3 tarjoaa käänteisen napaisuuden suojauksen ohjaimelle.
Vastus R15 ja kondensaattori C2 ovat yksinkertainen alipäästösuodatin. Tämän on tarkoitus puhdistaa kaikki MOSFET-laitteiden aiheuttamat jännitepiikit, kun ne kytkevät päälle moottorin syöttöjännitteen.
Osaluettelo

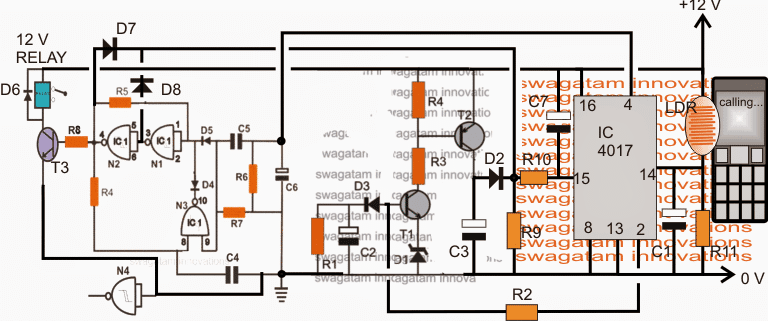
2) Kaksisuuntainen moottorin ohjaus IC 556: n avulla
DC-moottoreiden nopeuden ja kaksisuuntaisen ohjauksen toteuttaminen on suhteellisen yksinkertaista. Itsenäisesti jännitteisten moottoreiden nopeus on periaatteessa syöttöjännitteen lineaarinen funktio. Kestomagneettiset moottorit ovat itsenäisesti jännitteisten moottoreiden alaluokka, ja niitä käytetään usein leluissa ja malleissa.
Tässä piirissä moottorin syöttöjännitettä muutetaan pulssinleveyden moduloinnilla (PWM), joka varmistaa hyvän hyötysuhteen ja suhteellisen korkean vääntömomentin pienillä moottorin nopeuksilla. Yksi 0 ja +10 V: n välinen ohjausjännite mahdollistavat moottorin kierrosluvun kääntämisen ja vaihtelun tyhjästä maksimiin molempiin suuntiin.
Astabiili multivibraattori-IC on asetettu 80 Hz: n oskillaattoriksi, ja se määrittää PWM-signaalin taajuuden. Virtalähde T1 varaa Ca. Tämän kondensaattorin sahahampaiden jännitettä verrataan 1C2: n ohjausjännitteeseen, joka lähettää PWM-signaalin puskuriin N1-Na tai NPN1. Darlington-pohjainen moottoriohjain on siltapiiri, joka pystyy kuljettamaan kuormia jopa 4 ampeeria edellyttäen, että sisäänvirta pysyy alle 5 ampeerin ja riittävä jäähdytys on järjestetty tehotransistoreille T1 -Ts. Diodit D1, D5 tarjoavat suojan moottorin induktiivisilta ylijännitteiltä Kytkin S1 mahdollistaa moottorin suunnan kääntämisen välittömästi.

Kuvien prototyyppi



Edellinen: Vahvistinpiirien ymmärtäminen Seuraava: Kuinka kytkeä transistorit (BJT) ja MOSFET Arduinoon